
摘要:介紹圖像傳感器TCDl206的主要特點(diǎn)、結(jié)構(gòu)原理、引腳功能,并詳細(xì)分析其驅(qū)動時(shí)序。通過研究采用VHDL實(shí)現(xiàn)TCDl206驅(qū)動脈沖的方法及邏輯設(shè)計(jì)原理,完成了驅(qū)動脈沖的VHDL程序設(shè)計(jì)和時(shí)序仿真。仿真結(jié)果證明了該驅(qū)動電路的可行性。
關(guān)鍵詞:TCDl206;線陣CCD;驅(qū)動時(shí)序;VHDL
電荷耦合器件CCD(Charge Couple Device)是集光電轉(zhuǎn)換、電荷儲存、電荷轉(zhuǎn)移為一體的新型光電傳感器件。該器件的主要功能是將光學(xué)圖像轉(zhuǎn)換為電信號。當(dāng)對其施加特定時(shí)序脈沖時(shí),其存儲電荷能在CCD內(nèi)作定向移動,從而實(shí)現(xiàn)自掃描.輸出電壓信號的大小與CCD單元存儲的電荷多少成正比,CCD單元存儲電荷多少與光的強(qiáng)度和CCD單元光積分時(shí)間成正比。與傳統(tǒng)的光電傳感器相比,CCD圖像傳感器具有輸出噪聲小,動態(tài)范圍大,光譜響應(yīng)范圍寬,分辨率高,輸出信號線性度好,功耗低,體積小,壽命長等優(yōu)點(diǎn)。而CCD應(yīng)用的關(guān)鍵就是獲取驅(qū)動脈沖,這里分析線陣CCD-TCDl206的工作原理和對驅(qū)動時(shí)序的要求,在此基礎(chǔ)上設(shè)計(jì)合理的脈沖產(chǎn)生方案。該設(shè)計(jì)采用復(fù)雜可編程邏輯器件CPLD作為硬件設(shè)計(jì)平臺,通過超高速硬件描述語言VHDL描述驅(qū)動方案,采用Altera公司的仿真軟件QUARTUS II對其驅(qū)動脈沖進(jìn)行仿真。
1 TCDl206的主要特點(diǎn)
TCDl206是一款高靈敏度、低暗電流、2 160像元的雙溝道線陣CCD圖像傳感器。由2 236個PN結(jié)光電二極管構(gòu)成光敏元陣列,其中前64個和后12個是用作暗電流檢測而被遮蔽的,中間2 160個光電二極管是曝光像敏單元,每個光敏單元的尺寸為長14μm、高14μm,中心距亦為14μm。光敏元陣列總長為30.24 mm。
TCDl206的主要特性有:1)光敏像元數(shù)為2 160像元;2)像敏單元為:14μmxl 414μm(相鄰像元中心距為14μm);3)光譜范圍為250~l 100 nm:4)光敏區(qū)域采用高靈敏度PN結(jié)作為光敏單元;5)時(shí)鐘為二相(5 V);6)內(nèi)部電路包含采樣保持電路,輸出預(yù)放大電路;7)采用22引腳DIP封裝。
2 TCDl206的結(jié)構(gòu)原理和引腳功能
2.1結(jié)構(gòu)原理
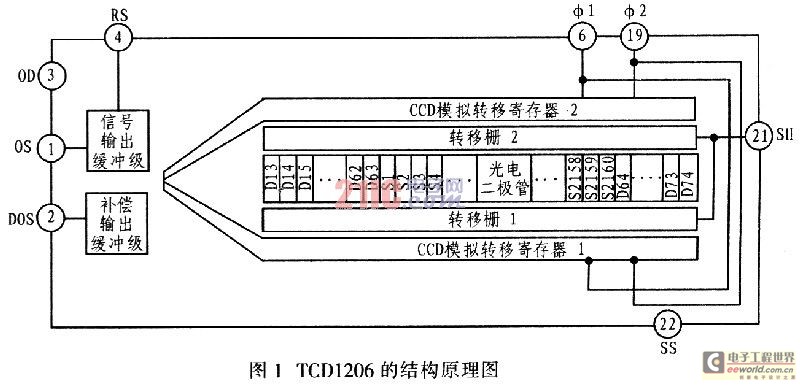
TCDl206是二相電極的雙溝道線型CCD,其結(jié)構(gòu)原理如圖1所示。中間一排是由多個光敏二極管構(gòu)成的光敏陣列,有效單元為2 160位,其作用是接收照射到CCD硅片的光,并將其轉(zhuǎn)化成電荷信號,光敏元兩側(cè)是存儲其電荷的MOS電容列一存儲柵。MOS電容列兩側(cè)是轉(zhuǎn)移柵電極SH。轉(zhuǎn)移柵的兩側(cè)為CCD模擬移位寄存器,其輸出部分由信號輸出單元和補(bǔ)償單元構(gòu)成。
2.2引腳功能
TCDl206器件采用DIP封裝,各引腳功能如表1所示。

3 驅(qū)動時(shí)序及驅(qū)動設(shè)計(jì)
3.1驅(qū)動時(shí)序分析
TCDl206在圖2所示的驅(qū)動脈沖作用下工作。當(dāng)SH脈沖高電平到來時(shí),φ1脈沖為高電平,其下形成深勢阱,同時(shí)SH的高電平使φ1電極下的深勢阱與MOS電容存儲勢阱溝通。MOS電容中的信號電荷包通過轉(zhuǎn)移柵轉(zhuǎn)移到模擬移位寄存器的φ1電極下的勢阱中。當(dāng)φSH由高變低時(shí),φSH低電平形成的淺勢阱將存儲柵下的勢阱與φ1電極下的勢阱隔離開。存儲柵勢阱進(jìn)入光積分狀態(tài),而模擬移位寄存器將在φ1與φ2脈沖的作用下驅(qū)使轉(zhuǎn)移到φ1電極下的勢阱中的信號電荷向左轉(zhuǎn)移,并經(jīng)輸出電路由OS電極輸出。DOS端輸出補(bǔ)償信號。

由于結(jié)構(gòu)上的安排,OS端首先輸出 13個虛設(shè)單元信號,再輸出51個暗信號,然后才連續(xù)輸出Sl到S2160的有效像素單元信號。第S2160信號輸出后,又輸出9個暗信號,再輸出2個奇偶檢測信號,以后是空驅(qū)動。空驅(qū)動的數(shù)目可以是任意的。由于該器件是兩列并行分奇偶傳輸?shù)模栽谝粋€SH周期中至少要有1 118個φ1脈沖。RS為復(fù)位級的復(fù)位脈沖,復(fù)位一次輸出一個信號。
3.2驅(qū)動電路設(shè)計(jì)
驅(qū)動電路的作用是給CCD提供正常工作所需要的邏輯時(shí)序脈沖和偏置工作電壓.并在CCD的輸出端把光電轉(zhuǎn)換得到的電荷量轉(zhuǎn)變成電壓量輸出。驅(qū)動脈沖信號的波形、相位、前后沿時(shí)間等對器件工作有很大影響。
為了保證CCD工作穩(wěn)定可靠.必須設(shè)計(jì)符合CCD正常工作要求的時(shí)序脈沖和驅(qū)動控制電路,驅(qū)動控制脈沖與CCD良好配合,才能充分發(fā)揮CCD的光電轉(zhuǎn)換、電荷存儲和電荷轉(zhuǎn)移等功能。不同型號的CCD要求的工作參數(shù)不同,很難設(shè)計(jì)一種驅(qū)動控制電路同時(shí)滿足多種CCD工作需要,即使是相同像元數(shù)的CCD器件,若型號不同也不具有互換性。
TCDl206傳感器的驅(qū)動脈沖都為周期性方波,但周期和占空比不同。其4路驅(qū)動脈沖之間需要滿足特定的時(shí)序關(guān)系:根據(jù)驅(qū)動脈沖時(shí)序圖可知在1個SH周期中至少有l(wèi) 118個φ1脈沖。即TSH>l 118T1,T1為驅(qū)動脈沖φ1的周期。這里選擇TSH=1 128T1。在SH為高電平期間,要求φ1l與φ2有一個大于SH=1持續(xù)時(shí)間的寬脈沖,這是由于此時(shí)像元中的電荷正在向兩列寄存器中轉(zhuǎn)移,如果在此期間φ1與φ2有上升或下降沿出現(xiàn),則會造成電荷轉(zhuǎn)移不完全的情況。時(shí)鐘脈沖φ1,φ2頻率的最大值是l MHz,典型值是0.5 MHz。復(fù)位脈沖RS頻率的最大值是2 MHz,典型值是1 MHz。本設(shè)計(jì)中都選用典型值。而且φ1、φ2必須反相,占空比l:l;SH的高電平脈沖寬度要小于φ1,φ2;RS與CLK時(shí)鐘的占空比為l:4。
3.2.1原理圖設(shè)計(jì)
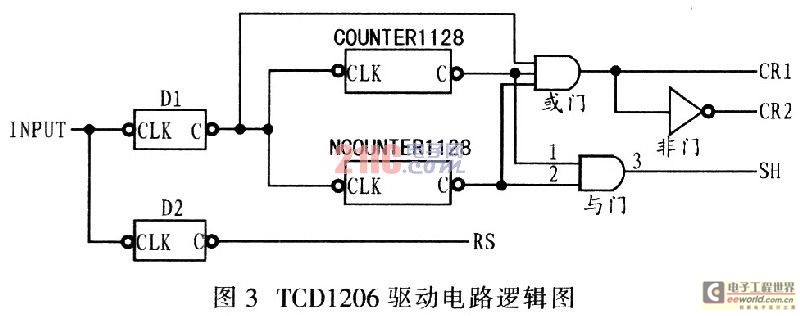
確定SH、φ1、φ2和RS的參數(shù)后,則可根據(jù)它們之間的時(shí)序關(guān)系設(shè)計(jì)硬件邏輯圖,如圖3所示。
本設(shè)計(jì)利用CPLD作為硬件設(shè)計(jì)平臺,它具有較高的靈活性,電子電路設(shè)計(jì)完成后,如果需修改時(shí)序邏輯。只需重寫CPLD內(nèi)部邏輯電路即可。因此,CPLD非常適合用于設(shè)計(jì)CCD驅(qū)動電路。
各個模塊的設(shè)計(jì)采用VHDL語言描述。采用4 MHz的時(shí)鐘CLK作為輸入的時(shí)鐘,Dl模塊用于將時(shí)鐘信號進(jìn)行8分頻,將4 MHz的時(shí)鐘頻率分成0.5 MHz。D2模塊是將時(shí)鐘頻率分成l MHz,占空比為l:4。COUNTERll28模塊和NCOUNTERll28模塊分別是上升沿和下降沿計(jì)數(shù),計(jì)數(shù)范圍在0~1128之間循環(huán),在前兩個時(shí)鐘為高電平,其余時(shí)間都為低電平。
電路實(shí)現(xiàn)是先用D1模塊將4 MHz的時(shí)鐘頻率分成0.5 MHz,用0.5 MHz的脈沖作為COUNTERll28和NCOUNTERll28的輸入端,將COUNTERll28和NCOUNTERll28的輸出相與,輸出結(jié)果就是SH,將D1和COUNTERll28以及NCOUNTERll28的輸出進(jìn)行邏輯或,則得到φ1,再將φ1反相,得到φ2,由D2模塊可直接得到RS。
3.2.2模塊電路的VHDL設(shè)計(jì)
每個模塊的VHDL設(shè)計(jì)都包括如下部分:1)定義所需的庫函數(shù);2)定義輸入、輸出端口;3)對設(shè)計(jì)所需預(yù)置數(shù)初始化;4)相關(guān)功能的實(shí)現(xiàn)語句。CCD驅(qū)動程序主體部分設(shè)計(jì)如下:

4 設(shè)計(jì)結(jié)果仿真
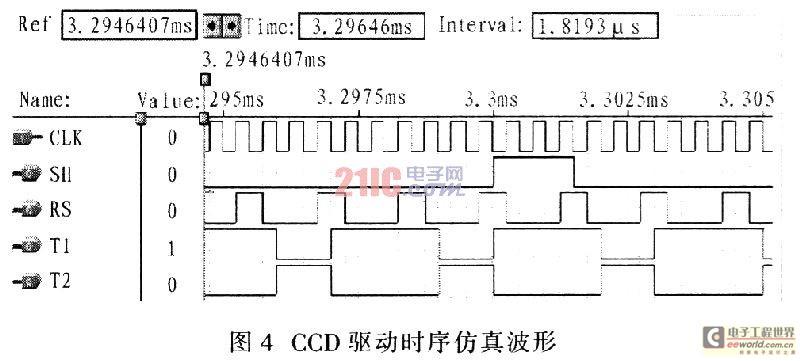
圖4是在Altem公司的QUARTUS II開發(fā)系統(tǒng)中仿真的波形.從圖中可以看出,產(chǎn)生的4路驅(qū)動脈沖完全滿足TCDl206所需的時(shí)序脈沖,達(dá)到驅(qū)動要求。
5 結(jié)束語
VHDL是一種自上向下設(shè)計(jì)的硬件描述語言,同時(shí)又具有高級語言的特性,這使得用這種硬件描述語言設(shè)計(jì)的邏輯功能比較容易實(shí)現(xiàn)。同時(shí)VHDL語言具有很好的可重用性和可移植能力,能夠減輕工作量。利用VHDL設(shè)計(jì)整個傳感器的驅(qū)動,并與硬件原理圖相結(jié)合,不同于以往以單純的硬件設(shè)計(jì)實(shí)現(xiàn),這樣不僅利于修改而且設(shè)計(jì)周期短。因此,基于VHDL對TCDl206驅(qū)動電路的設(shè)計(jì)是一種較實(shí)用的設(shè)計(jì)方案。