
1 引 言
在當(dāng)前世界能源緊張,各種能源價格飛漲的形勢下,各國都將眼光投向了可再生能源,一則這種能源可再生,取之不盡、用之不竭;再則,可再生能源對環(huán)境友好,對地球及人類的生存環(huán)境的危害幾乎可以忽略不計。在可再生能源中,太陽能無疑是最引人矚目的,太陽能的開發(fā)利用日益廣泛,其技術(shù)也日益成熟。中國蘊藏著豐富的太陽能資源,太陽能利用前景廣闊。然而,找到可靠的太陽能跟蹤系統(tǒng),是聚熱型太陽能系統(tǒng)運行效率的基本保證,也是太陽能聚熱系統(tǒng)投入運行的重要前提之一。資料表明Omron公司也非常重視太陽能系統(tǒng)的開發(fā)。在西班牙馬德里郊外的日平均輸出功率630-640kwh的太陽能光伏發(fā)電系統(tǒng)中,Omron公司的控制部件就在太陽跟蹤和電能轉(zhuǎn)換上就發(fā)揮了重要的作用。本文也是利用Omron的控制部件,設(shè)計出拋物面聚熱型太陽能控制系統(tǒng),投入使用,并起到良好的集熱效果,提高了國內(nèi)太陽能集熱器的控制水平。
2 拋物面聚熱型太陽能集熱器
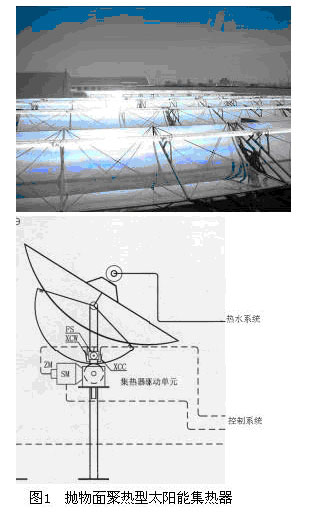
拋物面聚熱型太陽能集熱器主要由拋物面型反射鏡面、集熱管、跟蹤機構(gòu)以及熱水系統(tǒng)組成,如圖1所示。反射鏡面用于將陽光反射并聚焦到集熱管上,以積聚熱能。反射鏡面采用拋物面,材料為鏡面鋁板,表面有不親灰的涂層。集熱管位于拋物面的焦點位置,用于吸收反射鏡面反射的陽光,加熱管內(nèi)循環(huán)水。集熱管內(nèi)管為不銹鋼金屬管,外管為玻璃管,內(nèi)外管之間為真空,以隔絕傳熱。陽光穿過外管照射到涂有鋁氮-鋁光譜選擇性涂層的金屬管上,以積聚太陽能。跟蹤機構(gòu)控制太陽能集熱板跟蹤太陽不停的轉(zhuǎn)動,確保集熱管始終處在太陽反射光線的焦線位置。熱水系統(tǒng)由熱水泵,溫度傳感器,流量開關(guān),壓力控制器等組成,將集熱管中的熱量輸送到外部系統(tǒng),保證熱水系統(tǒng)的循環(huán)運行。
3 控制系統(tǒng)工作原理
控制系統(tǒng)中的核心控制器根據(jù)當(dāng)?shù)亟?jīng)緯度,當(dāng)?shù)貥藴蕰r間以及太陽能集熱器的安裝方位,計算出太陽集熱板的聚焦角度;然后控制器輸出脈沖信號,通過脈沖信號放大器控制步進電機SM,步進電機SM帶動減速箱和傳動齒輪,不斷的調(diào)整集熱板的角度,使集熱管始終處于焦點位置,達到最高的集熱效率。磁性傳感器ZM用來檢測步進電機是否轉(zhuǎn)動,防止傳動系統(tǒng)故障;XCW,XCC限位開關(guān),用于限制集熱板的轉(zhuǎn)動位置。然而僅僅采用太陽角度計算公式來跟蹤太陽有一定的局限性,與集熱板的安裝精度,安裝角度的測量有很大的關(guān)系。所以采用光輻射傳感器,判斷聚焦點偏離情況,并做相應(yīng)的調(diào)整,保證聚焦效果。通過太陽角度計算公式粗調(diào),通過光輻射傳感器反饋進行精調(diào)的閉環(huán)控制方案,使集熱板能快速,準確的找到聚焦位置,保證太陽能的利用效率。此外控制器控制熱水泵和熱水溫度,保護熱水系統(tǒng)的循環(huán)運行和安全。
4 控制系統(tǒng)組成
控制系統(tǒng)采用OMRON公司的CJ1-CPU23作為控制器,該CPU內(nèi)置兩路脈沖I/O通道,可單獨控制兩列集熱器,如果太陽能集熱板陣列超過兩列,則增加位置控制模塊CJ1W-NC413,每列集熱板單獨控制,使各列的操作性強,控制靈活;采用CJ1-ID211和CJ1-OC211開關(guān)量輸入輸出模塊,采集限位開關(guān)狀態(tài),控制熱水泵等;CJ1-AD08用于采集光輻射、熱水壓力模擬量信號;CJ1-DRM21和DRT2-TS04P網(wǎng)絡(luò)模塊采集熱水和環(huán)境的溫度,且方便以后擴展控制系統(tǒng),NT5Z觸摸屛用于設(shè)計操作界面,設(shè)定參數(shù)和顯示太陽能集熱器的狀態(tài)。圖2示出控制電柜。

5 控制系統(tǒng)軟件設(shè)計
控制系統(tǒng)軟件可分四大功能模塊:按太陽規(guī)律計算集熱板角度、角度轉(zhuǎn)換脈沖信號輸出、光輻射自動跟蹤、熱水系統(tǒng)控制。
5.1 太陽能集熱板角度計算
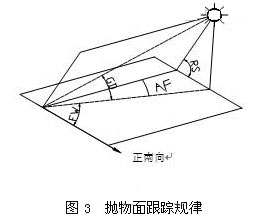
太陽運動規(guī)律的計算方法在《solar position algorithms for solar radiation applications》中有詳細的說明,按照公式計算出太陽高度角GD和太陽方位角FW(見圖3),就確定了某時刻太陽相對地面某一點的位置。根據(jù)太陽能集熱器的安裝方位AF,可以計算出太陽能集熱板需要的角度RS。這樣拋物面跟蹤規(guī)律可作為二維問題來處理,只要保證RS計算正確,就可以實時跟蹤太陽。
(1) 太陽高度角GD是地球表面上某點和太陽的連線與地平面之間的交角,它隨著當(dāng)?shù)鼐暥取⒓竟?jié)、每日時刻的不同而改變,可根據(jù)當(dāng)?shù)鼐暥取⒊嗑暯恰r角計算。按照下式計算。
GD = arcsin(sin(La)×sin(CW)+cos(La)×cos(CW)×cos(SJ))
La-當(dāng)?shù)鼐暥龋瑔挝粸槎取?/p>
式中:
H - 真太陽時. 當(dāng)?shù)靥栁挥谡舷虻乃矔r為正午;
Hs-該地區(qū)標準時間。(單位:小時);
L、LS-分別為當(dāng)?shù)氐慕?jīng)度和地區(qū)標準時間位置的經(jīng)度;
e-時差,單位為分鐘;其值可按下式近似計算:
e = 229.2×(7.5×10-5+0.001868×cosB-0.032077×sinB-0.014615×cos2B-0.04089×sin2B);
B=360×(n-1)/365; (1≤n≤366)分母需要區(qū)分平年和閏年。
(2) 太陽方位角(FW)是太陽至地面上某給定點連線在地面上的投影與正南向的夾角。方位角在太陽偏東時為負,偏西時為正。太陽方位角FW可由當(dāng)?shù)鼐暥取⒊嗑暯恰r角、高度角計算,公式如下:
FW =C1×C2×arcsin(sin(SJ)×cos(CW)/cos(GD)) + 180×C3×(1- C1×C2)/2 ;C1 C2 C3常量。
(3) 太陽能集熱器角度(RS)是太陽光線與反射鏡弦面的交角。可由高度角、方位角、集熱器安裝角計算,公式:
RS= arctan(tan(GD)/cos(FW-AF));
可見,太陽角度的計算很復(fù)雜,并需要采用浮點數(shù)計算,如果用梯型圖編寫將會很困難,且出現(xiàn)問題那很難檢查。但如果能使用高級語言編寫,純屬的計算就很簡單了。此時,采用OMRON功能塊的結(jié)構(gòu)化文本(ST)語言編寫, 這個問題迎韌而解。集熱板角度計算功能塊SolarRSCalculate_Real如圖4所示。
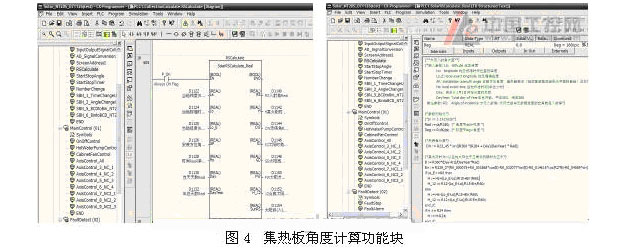
輸入?yún)?shù)為:當(dāng)?shù)亟?jīng)度,當(dāng)?shù)鼐暥龋惭b方位角,當(dāng)?shù)貢r間,當(dāng)年天數(shù);
計算輸出為:集熱板角度,真太陽時,高度角,方位角;
數(shù)據(jù)格式:浮點數(shù);
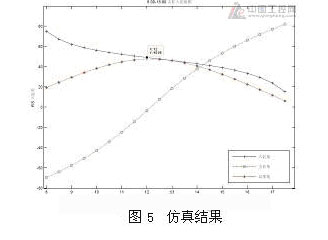
此外,采用Matlab編寫的仿真程序計算(見圖5)出來的結(jié)果與OMRON
PLC功能塊計算出來的結(jié)果相同,表明集熱板角度計算功能塊SolarRSCalculate_Real設(shè)計正確。
5.2角度轉(zhuǎn)換脈沖信號輸出
PLC計算出集熱板角度后,需要將角度轉(zhuǎn)換為脈沖信號輸出,控制步進電機,使集熱器轉(zhuǎn)到指定位置。根據(jù)齒輪的降減速比、步進電機和步進電機驅(qū)動器特性可以計算出脈沖數(shù)。假設(shè)集熱板需要轉(zhuǎn)動0 .3°(相對角度):

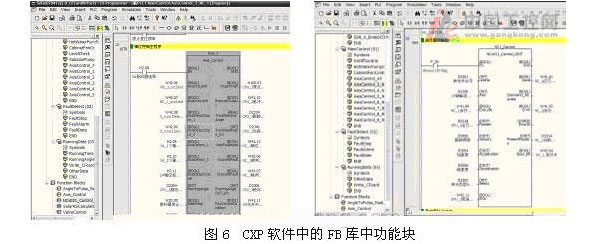
由以上比例可得,轉(zhuǎn)動0.1°需要發(fā)出56個脈沖,這樣就將角度轉(zhuǎn)換成了所需的脈沖數(shù);然后采用CXP軟件中的FB庫中\(zhòng)OmronlibPositionControllerNCxNCx021_MoveRelative的功能塊控制NC模塊輸出脈沖(見圖6)。
由于集熱板的角度采用相對位置控制,在集熱板首次運行過程中,需要確定集熱板的原點。使PLC能計算出集熱板的絕對位置。確定原點時,集熱板向順時針方向偏轉(zhuǎn),當(dāng)達到XCW限位開關(guān)時,將當(dāng)前位置作為原點位置,然后采用相對角度的方法控制集熱板運行。在步進電機轉(zhuǎn)動的過程中,采用磁性傳感器ZM判斷步進電機是否轉(zhuǎn)動。如果PLC發(fā)出脈沖信號,但磁性傳感器ZM沒有檢測到信號則認為步進電機堵轉(zhuǎn),并報警提示。
5.3 自動跟蹤反饋裝置的設(shè)計
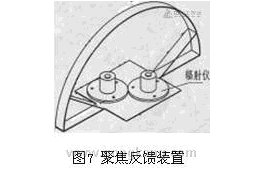
只有太陽光實時的聚焦在集熱管上,才能保證集熱板的集熱效率。集熱板偏離0.6°,太陽反射光就沒有聚焦在集熱管,所以控制系統(tǒng)的準確性很重要。采用如圖7所示的聚焦反饋裝置,可以解決這個問題。反饋裝置與集熱管平行安裝,太陽光通過條形擋板后,陰影投在兩個輻射儀之間。聚焦準確時,兩個光傳感器檢測的光輻射相同;聚焦偏離,則兩個輻射儀之間有差值,通過判斷差值,可以判斷焦點偏離的方向和偏移量。光輻射儀采用4~20mA信號輸出,通過CJ1-AD08模塊量輸入采集到控制系統(tǒng),PLC在按太陽規(guī)律計算的太陽角度的基礎(chǔ)上進行微小的調(diào)整,到達控制要求。
5.4 熱水系統(tǒng)控制
太陽能熱水系統(tǒng)由熱水泵,溫度傳感器,壓力傳感器等組成,將太陽能集熱器產(chǎn)生的熱水輸送到外部系統(tǒng),通過DRT2-TS04P溫度終端模塊采集的熱水的出入口溫度,可以用來判斷集熱板的工作效率,同時當(dāng)熱水超溫或超壓時,自動偏移焦點,對集熱板進行保護。NT5Z設(shè)計的觸摸屛操作界面(見圖8),用于顯示集熱板的運行狀態(tài),工況記錄和設(shè)置控制參數(shù)。

6 結(jié)束語
整個控制系統(tǒng)設(shè)計中,OMRON PLC的浮點數(shù)計算,功能塊的結(jié)構(gòu)化文本語言,脈沖控制等功能都充分的發(fā)揮了作用。特別是集熱板增加到多列,只需要增加位置控制模塊,插入功能塊就可以控制。而且CXP軟件自身提供的功能塊,使設(shè)計師只要認真考慮工藝流程,軟硬件之間的接口控制,通過現(xiàn)有的FB庫或自己設(shè)計的功能塊來實現(xiàn),使程序模塊化更強,結(jié)構(gòu)更簡單。
OMRON自動化技術(shù)在紡織、包裝、印刷、機床、生產(chǎn)線等很多領(lǐng)域得到運用,可再生能源作為新型的研究應(yīng)用領(lǐng)域,也是能源可持續(xù)的發(fā)展方向,在未來的運用將越來越多,市場也將越來越廣闊。所以,我希望OMRON公司也能深入這個領(lǐng)域,不斷推出性能越來越優(yōu)質(zhì)的產(chǎn)品,來滿足新領(lǐng)域的自動化控制需求。