
關(guān)鍵字:dsPIC30F5011 ABS電子控制器
0引言
汽車防抱死制動系統(tǒng)又稱 ABS,,是一種具有防滑,、防鎖死等優(yōu)點的安全剎車控制系統(tǒng)。沒有安裝ABS 系統(tǒng)的車,,在遇到緊急情況時,,來不及分步緩剎,只能一腳踩死,,這時車輪容易抱死,,加之車輛沖刺慣性,可能發(fā)生側(cè)滑,、跑偏,、方向不受控制等危險狀況;而裝有ABS的車,,當(dāng)車輪即將到達下一個鎖死點時,,剎車在一秒內(nèi)可作用60 至120 次,相當(dāng)于不停地剎車、放松,,即相似于機械的“點剎”,。因此,可以避免在緊急剎車時方向失控及車輪側(cè)滑,,使車輪在剎車時不被鎖死,,輪胎不在一個點上與地面摩擦,加大了摩擦力,,使剎車效率達到90%以上[1],。
ABS 系統(tǒng)的關(guān)鍵控制部件是ABS 電子控制器,即ECU,。本文在分析了ABS 制動原理和控制器結(jié)構(gòu)基礎(chǔ)上,,針對某車型選用具有強大數(shù)據(jù)處理功能的dsPIC30F5011 單片機,結(jié)合ABS系統(tǒng)芯片,,完成了ABS_ECU 硬件設(shè)計,,并開發(fā)了控制程序,在自主研發(fā)的硬件在回路仿真器上進行了仿真實驗,,得到了良好的效果,。
1 ABS制動原理
在汽車的制動過程中,使汽車制動而減速行駛的外力是路面作用于輪胎胎面上的地面制動力,,但地面制動力取決于兩個摩擦副的摩擦力:一是制動裝置對車輪的摩擦力,,即制動器制動力;另一個是輪胎與路面間的摩擦力,,即地面附著力,。只有當(dāng)汽車有足夠的制動器制動力及地面附著力時,才能獲得足夠的地面制動力[2],。汽車制動過程中通常存在滑移現(xiàn)象,,即車速和輪速之間存在著速度差所造成的相對滑動,這種滑移的程度由滑移率來表示:

汽車制動時,,附著系數(shù)與輪胎滑移率關(guān)系曲線如圖1 所示,,圖中φ表示附著系數(shù)。
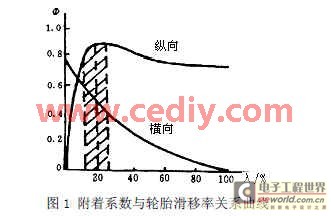
由圖1 可知,,滑移率在15%-20%時,,橫向和縱向的附著系數(shù)都比較大,而大量的研究試驗也表明,,此時汽車的制動效果最好,。
ABS 在汽車制動過程中,當(dāng)車輪趨于抱死,,迅速降低制動系統(tǒng)的壓力,,使車輪滑移率恢復(fù)到靠近理想穩(wěn)定區(qū),通過自動、高頻率的對制動系統(tǒng)壓力進行調(diào)節(jié),,使車輪滑移率保持在理想滑移率附近的狹小范圍內(nèi),,以充分利用車輪與路面間的縱向峰值附著系數(shù)和較高的橫向附著系數(shù),從而實現(xiàn)防止車輪抱死并獲得最佳制動效能[3],。
2 ECU硬件設(shè)計
2.1 ECU結(jié)構(gòu)組成
ABS 系統(tǒng)主要由車輪轉(zhuǎn)速傳感器,、電子控制器(ECU)、電磁閥三部分組成,。而系統(tǒng)核心部分是ECU,,其組成如圖2 所示,主要包括系統(tǒng)電源管理,、輪速信號處理,、處理器(單片機)、電磁閥驅(qū)動器和ABS 故障檢測等部分,。
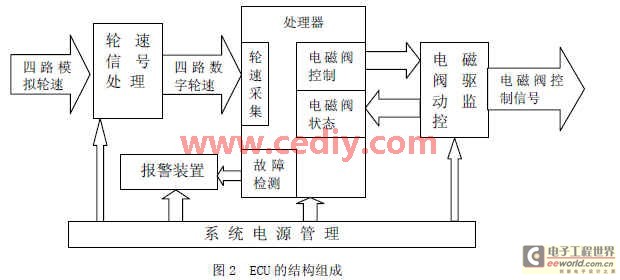
輪速信號處理模塊將輸入的模擬輪速信號進行變換處理,,得到規(guī)則的數(shù)字輪速輸入到處理器中,由處理器計算并判斷各輪是否正趨于抱死,;電磁閥驅(qū)動監(jiān)控模塊放大來自處理器的電磁閥控制信號,,使其能夠驅(qū)動執(zhí)行機構(gòu)(制動壓力調(diào)節(jié)器)調(diào)節(jié)制動壓力使輪速處于不斷循環(huán)的增壓-保壓-減壓狀態(tài),同時將當(dāng)前電磁閥控制信號反饋至處理器來監(jiān)控控制邏輯,。
2.2 處理器選型和設(shè)計
ECU 最關(guān)鍵的部分是處理器,,目前大多采用16 位單片機作為ECU 的處理器,其一方面采集輪速信號進入ABS 算法處理,,另一方面發(fā)送電磁閥控制指令到執(zhí)行機構(gòu),,對車輪進行增壓-保壓-減壓處理;同時它還外擴了故障檢測,、電磁閥監(jiān)控部分,保證了ECU 正常運行,。無論是輪速采集和算法處理,,還是對車輪制動壓力的控制,都對核心處理器有較高要求:實時性強,、穩(wěn)定性好,、數(shù)據(jù)處理精度高等。Microchip 公司的dsPIC30F5011 作為高性能1位數(shù)字信號控制器,,既具備了單片機的控制功能,,也結(jié)合了DSP 的數(shù)字信號的處理能力。該芯片內(nèi)含完整的DSP 引擎:包含1 個高速的16×16 的整數(shù)乘法器,、1 個40 位的ALU,、2 個40 位的飽和累加器以及1 個40 位的雙向移位器,能夠明顯提高芯片計算能力。指令系統(tǒng)分成兩類:單片機類和DSP 類,。采用單級指令預(yù)取機制使得其指令大多數(shù)是單周期的,。片上集成66K FLASH,1K EEPROM,,4K RAM,,8 通道的輸入捕捉,一個8 通道的脈沖寬度調(diào)制模塊(PWM),。結(jié)合ICD2(在片調(diào)試器)在MAPLAB IDE 開發(fā)環(huán)境中,,對單片機進行程序編輯、編譯,、在線調(diào)試和下載,。
處理器的功能接口分布如圖3 所示。采用dsPIC30F5011 的輸入捕捉口(IC1…4)采集4 組輪速信號,,根據(jù)設(shè)置的采集方式可以準(zhǔn)確地偵測輪速信號的狀態(tài),,經(jīng)過ABS 算法后,通過8 路I/O 口輸出電磁閥控制信號,,同時將電磁閥狀態(tài)由8 路I/O 口反饋到處理器,,形成一個閉合回路用來監(jiān)控算法的控制邏輯。同時,,采用一個PWM 口輸出報警燈信號,,通過設(shè)置報警燈的閃爍頻率來判斷故障類別。來自剎車板的制動信號經(jīng)光耦隔離進入到單片機中,。有效的制動信號是進入ABS 算法的一個入口條件,。

2.3 輪速的采集和處理
電磁波動式輪速傳感器將輪速轉(zhuǎn)換成正比于輪速的正弦信號,一般輪速信號的頻率低于1KHz,,并且幅值比較低,,而且干擾量較多,必須將其轉(zhuǎn)換為TTL 電平的方波信號,,所以需要信號變換電路將變換后的輪速信號輸入到處理器中,。本設(shè)計采用了4 通道的輪速采集,經(jīng)LM324A 放大輪速信號,,再利用低通濾波和算法中的濾波部分削減干擾量,;最后經(jīng)過74HC14整形后的數(shù)字輪速信號,即為方波,,便可輸入到處理器中,。
2.4 電磁閥控制信號的輸出和處理
關(guān)鍵字:dsPIC30F5011 ABS電子控制器
經(jīng)過ABS 算法之后,處理器產(chǎn)生了8 路電磁閥控制信號,,以兩路電磁閥控制信號為一組來控制一個車輪,。其組合控制策略為:00 保壓,;01 增壓;10 減壓,。處理器輸出的電磁閥控制信號只有幾十毫安,,而執(zhí)行部件需要的電流為1~2A,所以需要對電磁閥控制信號放大,。本設(shè)計采用Infineon 公司的ABS 系統(tǒng)驅(qū)動芯片TLE6216,,每片可以驅(qū)動四路的電磁閥控制信號,同時把當(dāng)前的電磁閥狀態(tài)反饋到處理器中,,監(jiān)控控制效果,。
2.5 電源和故障檢測
為汽車中供電的是蓄電池或者發(fā)電機,重型車的蓄電池為24V,,發(fā)電機工作電壓為28V,,單片機工作電壓為5V,所以除了電源供給外還需要電壓轉(zhuǎn)化,。設(shè)計中采用了Infineon 公司的ABS 系統(tǒng)電源芯片TLE6210,,它可以將12V 的電壓轉(zhuǎn)化為單片機需要的5V,同時集成了報警燈,、發(fā)動機驅(qū)動等功能,。另外TLE6210 內(nèi)部集成了電壓監(jiān)控邏輯模塊,當(dāng)檢測到輸入輸出電壓過高或者過低時,,引腳RES1/RES2 將產(chǎn)生復(fù)位脈沖,,讓整個系統(tǒng)復(fù)位。由于系統(tǒng)電源有模擬部分和數(shù)字部分,,需要在兩部分電源之間添加隔離電感,,防止系統(tǒng)中模擬電路和數(shù)字電路的互相干擾。
對于ABS 產(chǎn)生的故障,,主要包括:系統(tǒng)供電故障,,輪速傳感器故障,ABS 系統(tǒng)運行故障,,電磁閥故障等,,操作人員可通過故障警報燈的閃爍頻率來判定故障來源和類型,并將相應(yīng)的故障碼存儲在EEPROM 中,,以便上位機進行識別和處理。
3 軟件設(shè)計
目前的ABS 系統(tǒng)主要采用參考門限值控制的方式,,即Bosch 控制邏輯,。這是當(dāng)今被廣泛采用的一種邏輯。這種方式將車輪角減速度,、角加速度和滑移率組合作為控制參數(shù)【4】
本文就是采用了以車輪的角加速度,、角減速度為主要門限,,以滑移率為輔助門限的控制策略,具體實現(xiàn)流程圖如圖4 所示,。
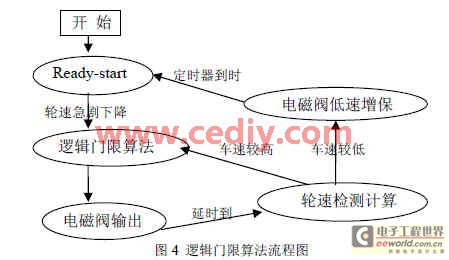
當(dāng)檢測到有效的剎車信號時,,處理器通過輪速傳感器采集到輪速脈沖信號,然后計算車速和加速度,,當(dāng)車速較高時,,調(diào)用滑移率邏輯門限算法,由電磁閥來輸出保壓,、減壓,、增壓信號,即初始制動時增壓,,在達到加速度門限,,并且滑移率仍然保持在穩(wěn)定區(qū)域內(nèi)時保壓,一段時間后達到滑移率穩(wěn)定臨界值減壓,。如此往復(fù),,使車速呈現(xiàn)波浪式降低。若車速較低,,電磁閥直接輸出增壓或者保壓信號,,此時輪速一直在減小,沒有回升,,直到減小至零,。
4 硬件在回路仿真試驗
利用在前期完成的國家“863”計劃項目“面向汽車電子控制的嵌入式系統(tǒng)開發(fā)平臺及其應(yīng)用” (2004AA1Z2380)中開發(fā)的硬件在回路仿真系統(tǒng)(如圖5 所示),我們對此ABS 控制器的制動過程進行了仿真,,仿真結(jié)果如圖6,、圖7 所示。
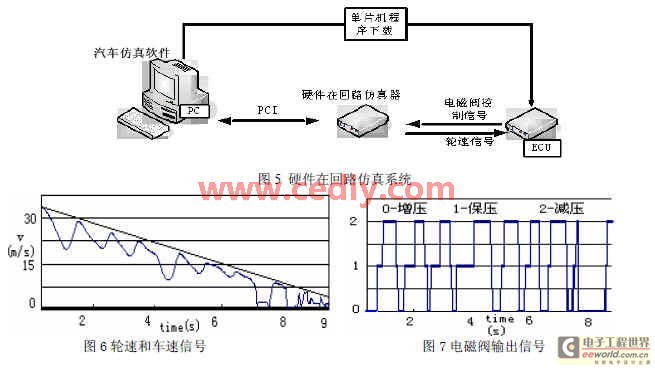
圖6,、圖7 是某氣壓制動型重型車在低附著系數(shù)路面,、初始車速為33(m/s)情況下的制動過程。觀察輪速曲線對應(yīng)的電磁閥的狀態(tài)變化:增壓-保壓-減壓,;當(dāng)輪速回升階段,,電磁閥的狀態(tài)變化是:減壓-保壓-增壓。由此可見,,制動時車輛在ABS ECU 控制下較好地防止了車輪抱死,、輪速波動相對穩(wěn)定,并且制動時間較短,,所以此控制器具有良好的制動效果,。
5 結(jié)論
采用Microchip 公司的dsPIC30F5011 作為ABS 系統(tǒng)的處理器,實現(xiàn)了輪速的快速采集,、判別處理,,以及滑移率等參數(shù)的計算,,保證了控制的實時性、穩(wěn)定性,。同時結(jié)合Infineon 公司的ABS 系統(tǒng)芯片,,使系統(tǒng)的電源管理、電磁閥驅(qū)動等更加優(yōu)化,,通過多次仿真試驗可以看出此ABS 控制器制動效果良好,。