
步進電機可分為反應式步進電機、永磁式步進電機和混合式步進電機。步進電機區(qū)別于其他控制電機的最大特點是,它是通過輸入脈沖信號來進行控制的,即電機的總轉(zhuǎn)動角度由輸入脈沖數(shù)決定,而電機的轉(zhuǎn)速由脈沖信號頻率決定。它具有高精度的定位、位置及速度控制、具定位保持力、動作靈敏、開回路控制不必依賴傳感器定位、中低速時具備高轉(zhuǎn)矩、高信賴性、小型、高功率等特征,使其具有廣泛的應用。
一、步進電機的工作原理
步進電機是機電控制中一種常用的執(zhí)行機構(gòu),它的用途是將電脈沖轉(zhuǎn)化為角位移,它的的驅(qū)動電路根據(jù)控制信號工作,控制信號由單片機產(chǎn)生。當步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設定的方向轉(zhuǎn)動一個固定的角度,控制換相順序,即通電控制脈沖必須嚴格按照一定順序分別控制各相的通斷。通過控制脈沖個數(shù)即可以控制角位移量,從而達到準確定位的目的。控制步進電機的轉(zhuǎn)向,即給定工作方式正序換相通電,步進電機正轉(zhuǎn),若按反序通電換相,則電機就反轉(zhuǎn)。控制步進電機的速度,即給步進電機發(fā)一個控制脈沖,它就轉(zhuǎn)一步,再發(fā)一個脈沖,它會再轉(zhuǎn)一步,兩個脈沖的間隔越短,步進電機就轉(zhuǎn)得越快。同時通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。
二、設計方案
本設計采用51單片機AT89C51(晶振頻率為12MHZ)對四相六線制步進電機(內(nèi)阻33歐,步進1.8度,額定電壓12V)進行控制。通過I/O口輸出的具有時序的方波作為步進電機的控制信號,信號經(jīng)過芯片ULN2003驅(qū)動步進電機。ULN2003 是高耐壓、大電流達林頓陳列,由七個硅NPN 達林頓管組成。ULN2003 的每一對達林頓都串聯(lián)一個2.7K 的基極電阻,在5V 的工作電壓下它能與TTL 和CMOS 電路直接相連,可以直接處理原先需要標準邏輯緩沖器來處理的數(shù)據(jù)。ULN2003 工作電壓高,工作電流大,灌電流可達500mA,并且能夠在關態(tài)時承受50V 的電壓,輸出還可以在高負載電流并行運行。通過ULN2003構(gòu)成步進電機的驅(qū)動電路,電路圖如圖1所示。51的25-28口接ULN2003的1-4輸入端。另外,用鍵盤來對電機的狀態(tài)進行控制,并用數(shù)碼管顯示電機的轉(zhuǎn)速,采用74LS164作為2位單個數(shù)碼管的顯示驅(qū)動。74LS164帶鎖存,使用串行接法可以節(jié)約I/O口資源。其電路圖如圖2所示。通過51的TXD和RXD口對CLK和DATA發(fā)送數(shù)據(jù)。
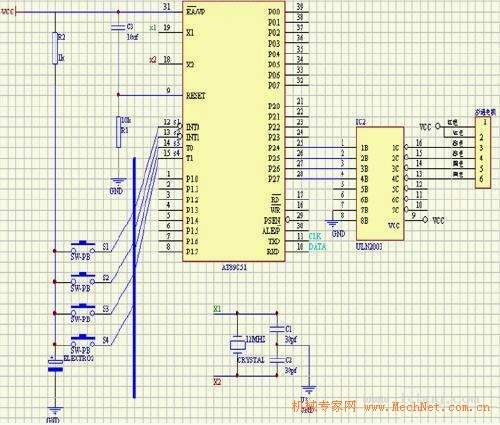
圖1 51單片機控制步進電機線路圖
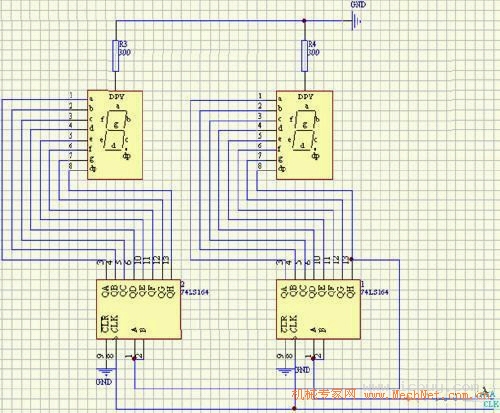
圖2 顯示電路圖
三、預期目標
將圖1圖2連接起來,使之實現(xiàn):按下啟動鍵,電機旋轉(zhuǎn),按下加1鍵,速度增加,按下減1鍵,速度降低,最高速度為100轉(zhuǎn)/分,最低速度為25轉(zhuǎn)/分,按下停止鍵,電機停轉(zhuǎn)。速度值在數(shù)碼管上顯示出來。
綜合以上選取的方案,總的流程如圖3所示。
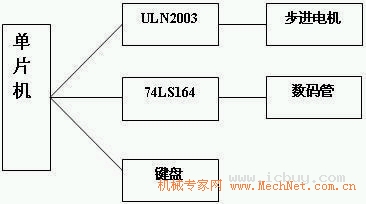
圖3 系統(tǒng)電路流程圖
結(jié)束語
設計的步進電機基本能實現(xiàn)預期目標,經(jīng)過調(diào)試和修改,但還是存在問題,比如按開關的時候會出現(xiàn)不穩(wěn)定情況,轉(zhuǎn)速有時比較亂,顯示有時也有些不理想,后面的工作就是在軟件和硬件等方面進行修改,以完全達到預期目標。