
引言
隨著計(jì)算機(jī)、機(jī)械、電子技術(shù)的發(fā)展,道路檢測(cè)車使得大規(guī)模、快速、準(zhǔn)確地獲取道路使用信息成為可能。檢測(cè)車上的攝像系統(tǒng)按攝像速度分為普通攝像機(jī)、高速攝像機(jī)和數(shù)碼攝像機(jī),其中高速攝像機(jī)主要用于對(duì)路面的裂縫、坑槽等破壞狀況進(jìn)行圖像采集。然而在使用高速攝像機(jī)時(shí),大多數(shù)檢測(cè)車采用的是持續(xù)照射的光源。由于光源的強(qiáng)度較低,在實(shí)際使用時(shí)往往需要增加曝光時(shí)間來(lái)達(dá)到高質(zhì)量的圖像數(shù)據(jù)。因此,提高照射的光源強(qiáng)度可以提高圖像數(shù)據(jù)的質(zhì)量。而脈沖氙燈就能解決光亮度與伴隨熱量的矛盾。它放電時(shí)發(fā)出強(qiáng)烈的光,但閃光持續(xù)時(shí)間很短,所以熱量影響較小。由于瞬時(shí)光能量大,圖像的層次還原較好[1]。
為了延長(zhǎng)脈沖氙燈的壽命,提高光電轉(zhuǎn)換效率,必須研制出適合脈沖氙燈的驅(qū)動(dòng)系統(tǒng)。本文設(shè)計(jì)了滿足脈沖氙燈工作時(shí)的起輝、預(yù)燃和高壓放電三個(gè)階段的驅(qū)動(dòng)系統(tǒng)。脈沖氙燈驅(qū)動(dòng)系統(tǒng)采用Microchip dsPIC30F為主控芯片。該芯片是一款將單片機(jī)與DSP技術(shù)相結(jié)合的高性能16位數(shù)字信號(hào)控制器,綜合了單片機(jī)(MCU)的控制功能和集成了多種外設(shè)的優(yōu)點(diǎn),以及數(shù)字信號(hào)處理器(DSP)的計(jì)算能力和數(shù)據(jù)處理吞吐能力[2]。此外,它在異常事件處理,軟件開發(fā)環(huán)境等方面也表現(xiàn)出強(qiáng)大的性能[3]。由于dsPIC30F芯片的內(nèi)部資源豐富,基于dsPIC30F平臺(tái)開發(fā)的脈沖氙燈驅(qū)動(dòng)系統(tǒng)需要的外設(shè)很少,不但系統(tǒng)的抗干擾性和可靠性能夠滿足脈沖氙燈在各種環(huán)境下運(yùn)行的要求,而且可以提高系統(tǒng)的靈活性,縮短開發(fā)時(shí)間,降低開發(fā)成本。
驅(qū)動(dòng)系統(tǒng)的硬件設(shè)計(jì)
驅(qū)動(dòng)系統(tǒng)在脈沖氙燈起輝時(shí)能夠提供足夠的輸入電壓(約5kV)使其發(fā)生輝光放電,在預(yù)燃及高壓放電時(shí)能夠提供穩(wěn)定的預(yù)燃電流(約100mA)及高壓放電電壓(1~3kV)。本系統(tǒng)驅(qū)動(dòng)四組并聯(lián)的脈沖氙燈,以dsPIC30F4011芯片為核心,硬件結(jié)構(gòu)圖如圖1所示,主要由dsPIC30F控制電路、高壓充放電電路、預(yù)燃電路、高壓起輝電路,面板輸出顯示及計(jì)算機(jī)通信接口構(gòu)成。
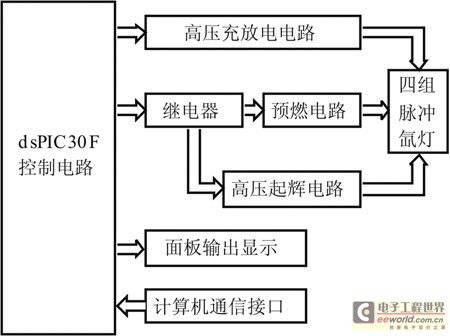
圖1 脈沖氙燈驅(qū)動(dòng)系統(tǒng)硬件結(jié)構(gòu)圖
dsPIC30F控制電路
dsPIC30F控制電路以dsPIC30F4011為主控芯片,主要實(shí)現(xiàn)脈沖氙燈工作時(shí)起輝、預(yù)燃和高壓放電三個(gè)階段時(shí)對(duì)相應(yīng)電路的工作進(jìn)行調(diào)節(jié),以及對(duì)檢測(cè)和保護(hù)信號(hào)進(jìn)行處理和面板顯示。控制電路上電進(jìn)行主電控制,將220V/AC輸入電壓接入到驅(qū)動(dòng)系統(tǒng)的主回路,包括高壓充放電電路、預(yù)燃電路和高壓起輝電路。然后通過(guò)功率變換,即可輸出脈沖氙燈工作時(shí)三個(gè)階段所需要的電壓。
起輝時(shí),控制電路使常閉觸點(diǎn)繼電器斷開,高壓起輝電路工作,發(fā)生輝光放電;起輝后,繼電器閉合,高壓起輝電路停止工作,預(yù)燃電路開始工作,輸出脈沖氙燈預(yù)燃工作時(shí)的維持電流;此后,脈沖氙燈的等效電阻逐漸達(dá)到穩(wěn)態(tài)并保持恒定,由輝光放電過(guò)渡到弧光放電。
脈沖氙燈被預(yù)燃成功后,高壓充放電電路開始工作,控制電路下降沿同步觸發(fā)信號(hào)控制高壓充放電電路中的功率開關(guān)器件IGBT對(duì)充放電電容進(jìn)行充電。電容充電完成后,控制電路觸發(fā)可控硅導(dǎo)通使充放電電容放電,脈沖氙燈產(chǎn)生弧光頻閃現(xiàn)象。觸發(fā)信號(hào)分為內(nèi)觸發(fā)和外觸發(fā),內(nèi)觸發(fā)信號(hào)主要用于脈沖氙燈正常工作前的調(diào)試,一般頻率較低,由dsPIC30F4011內(nèi)部的定時(shí)器1輸出10Hz且負(fù)脈沖為0.2ms的內(nèi)觸發(fā)信號(hào);外觸發(fā)信號(hào)來(lái)自于正常工作時(shí)的高速攝像機(jī)的同步信號(hào),頻率到達(dá)30kHz,由dsPIC30F4011的輸入捕捉功能產(chǎn)生同步信號(hào)來(lái)控制高壓充放電電路。高壓充放電電路的輸出高壓則通過(guò)高壓大小給定輸入調(diào)節(jié),由dsPIC30F4011內(nèi)部的10位A/D轉(zhuǎn)換模塊采集高壓大小給定輸入的模擬量,然后根據(jù)采集的數(shù)據(jù)輸出高壓大小給定值,從而可調(diào)節(jié)高壓充放電電路輸出1~3kV的高電壓。同時(shí),dsPIC30F4011根據(jù)檢測(cè)到的信號(hào)在面板上顯示各種狀態(tài)及處理各種故障,從而使系統(tǒng)工作穩(wěn)定可靠。
本系統(tǒng)可以通過(guò)計(jì)算機(jī)通信接口進(jìn)行遠(yuǎn)程控制,由dsPIC30F4011的串口通信接口實(shí)現(xiàn)啟動(dòng)停止,內(nèi)外觸發(fā)、高壓放充電調(diào)節(jié)及各種信號(hào)指示,從而可完全脫離對(duì)裝置的手動(dòng)操作。
起輝預(yù)燃電路
起輝預(yù)燃電路的原理如圖2所示,主電路由高頻推挽變換器、高頻變壓器、高壓?jiǎn)⑤x電路、UC3825控制電路、dsPIC30F控制電路、預(yù)燃檢測(cè)電路以及、輸入輸出整流濾波電路構(gòu)成。交流220V輸入電壓通過(guò)變壓器隔離,整流濾波后作為推挽變換器的輸入,推挽變換器將輸入電壓變換成高頻交流脈沖電壓,通過(guò)高頻變壓器完成電壓匹配和高頻隔離功能[4];經(jīng)過(guò)輸出整流濾波環(huán)節(jié)后,dsPIC30F4011根據(jù)預(yù)燃檢測(cè)電路檢測(cè)到的電流信號(hào)控制繼電器輸出預(yù)燃電壓和高壓起輝電壓。UC3825控制電路由高速PWM控制器UC3825及外圍電路組成,根據(jù)推挽變換主電路反饋的電流信號(hào),為開關(guān)器件提供PWM驅(qū)動(dòng)。
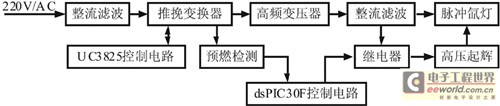
圖2 起輝預(yù)燃電路原理框圖
高壓充放電電路
高壓充放電電路的原理如圖3所示,主電路由IGBT組成的全橋變換器、電容充放電電路、UCC3895控制電路、dsPIC30F控制電路、過(guò)流保護(hù)、放電檢測(cè)及輸入輸出整流濾波電路構(gòu)成。交流電220V輸入經(jīng)過(guò)二極管全橋整流后由電容高壓濾波,全橋變換器將輸入電壓變換成高頻交流脈沖電壓,通過(guò)高頻變壓器完成電壓匹配和高頻隔離功能,然后經(jīng)過(guò)輸出整流給充放電電容充電。電容充電完成后,dsPIC30F4011觸發(fā)可控硅VT1控制電容通過(guò)脈沖氙燈放電,產(chǎn)生弧光頻閃。同時(shí)dsPIC30F控制電路根據(jù)過(guò)流保護(hù)及放電檢測(cè)的信號(hào)封鎖IGBT及處理故障。

驅(qū)動(dòng)系統(tǒng)的軟件設(shè)計(jì)
驅(qū)動(dòng)系統(tǒng)的軟件主要由主程序和子程序模塊組成。主程序流程圖如圖4所示,主程序主要完成遠(yuǎn)程通信控制和手動(dòng)控制的人機(jī)接口服務(wù)、面板顯示及故障處理。遠(yuǎn)程通信控制和手動(dòng)控制時(shí)的程序流程基本一樣,如圖5所示,只是遠(yuǎn)程通信控制時(shí)是由單片機(jī)的串行通信完成計(jì)算機(jī)對(duì)單片機(jī)的指令傳輸?shù)摹W映绦蚰K包括輸入捕捉中斷、Timer1定時(shí)中斷、A/D轉(zhuǎn)換和處理子程序、高壓給定輸出子程序和串口通信子程序。
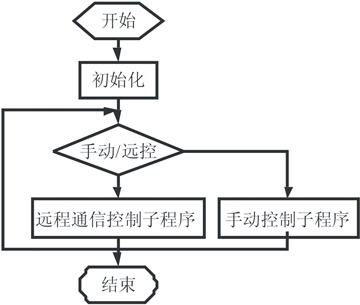
圖4 主程序流程圖
dsPIC30F4011具備許多允許器件與外界交換信息的外設(shè),其中包括定時(shí)器、輸入捕捉模塊、10位A/D轉(zhuǎn)換器及串口通信的UART模塊,并由6路占空比隨時(shí)更新的PWM輸出[5]。
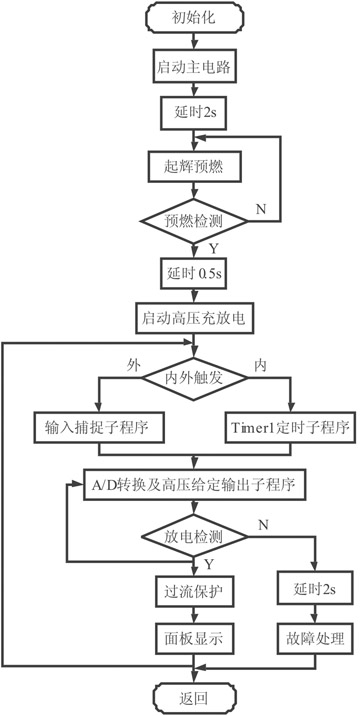
圖5 手動(dòng)/遠(yuǎn)程通信控制程序流程圖
輸入捕捉中斷子程序主要是檢測(cè)輸入捕捉引腳上的輸入電平的每個(gè)下降沿并產(chǎn)生中斷,輸出同步觸發(fā)信號(hào)及IGBT封鎖信號(hào),同時(shí)中斷標(biāo)志位被硬件置1,每次進(jìn)入輸入捕捉中斷后需對(duì)中斷標(biāo)志位軟件清零。另外,一次中斷完成后需對(duì)輸入捕捉控制寄存器清零復(fù)位,然后再重新配置參數(shù),初始化輸入捕捉功能。
Timer1定時(shí)中斷子程序主要是通過(guò)設(shè)定Timer1定時(shí)器每延時(shí)0.1s產(chǎn)生一次中斷,同時(shí)中斷標(biāo)志位被硬件置1,由此產(chǎn)生10Hz且負(fù)脈寬為0.2ms的同步觸發(fā)信號(hào)及IGBT封鎖信號(hào)。每次進(jìn)入Timer1定時(shí)中斷后需對(duì)中斷標(biāo)志位軟件清零。
A/D轉(zhuǎn)換采用Timer3定時(shí)器定時(shí),每10ms自動(dòng)轉(zhuǎn)換的模式,即ADCON1 = 0x0044;采用掃描輸入的方式,每16個(gè)采樣點(diǎn)后發(fā)生中斷,即ADCON2 =0x043C。本系統(tǒng)使用了2路通道掃描輸入,一次轉(zhuǎn)換后,每路通道的信號(hào)都采集了8個(gè)采樣點(diǎn),然后通過(guò)求平均值處理,減少了外界對(duì)數(shù)據(jù)的干擾,增強(qiáng)了數(shù)據(jù)的可靠性。
高壓給定輸出子程序主要是利用dsPIC30F4011內(nèi)部的PWM發(fā)生器根據(jù)給定輸入的模擬量裝載相應(yīng)的占空比,從而輸出對(duì)應(yīng)不同高壓的給定值。配置PWM信號(hào)為獨(dú)立輸出模式PWMCON1=0x0101,運(yùn)行在自由模式PTCON=0x8040,并設(shè)定時(shí)間基值周期PTPER=0x7FFF。
串口中斷設(shè)定為最高中斷優(yōu)先級(jí),使能接收中斷,禁止發(fā)送中斷。波特率發(fā)生器的值由公式U2BRG=FCY/(16×波特率)-1計(jì)算得到,其中FCY為指令周期時(shí)鐘頻率,波特率選擇9600bps,通過(guò)接收器和發(fā)送器進(jìn)行數(shù)據(jù)傳輸。
結(jié)語(yǔ)
本文提出的基于dsPIC30F4011高性能數(shù)字信號(hào)控制器的脈沖氙燈驅(qū)動(dòng)系統(tǒng)充分利用了dsPIC30F4011高性能數(shù)字信號(hào)控制器的內(nèi)部資源,提高了驅(qū)動(dòng)系統(tǒng)的運(yùn)行速度,而且簡(jiǎn)化了電路設(shè)計(jì),縮短了開發(fā)時(shí)間,降低了開發(fā)成本,提高了驅(qū)動(dòng)的可靠性和抗干擾性。按照此方案研制的高速攝影閃光儀已經(jīng)成功調(diào)試并安裝運(yùn)行于道路檢測(cè)車。實(shí)際的調(diào)試和運(yùn)行表明,此驅(qū)動(dòng)系統(tǒng)運(yùn)行可靠穩(wěn)定、抗干擾能力強(qiáng)、體積小,成本低,能驅(qū)動(dòng)多種型號(hào)的脈沖氙燈。