
0 引言
晃電作為一種特殊的故障,危害很大,特別是對連續(xù)運行的企業(yè)。目前抗晃電的方法可歸結為如下4 類:
(1) 應用斷電延時繼電器、電動機再起動器。
通過時序關系,使接觸器的主觸頭在晃電結束后重新吸合( 晃電期間斷開),實現(xiàn)電動機再起動。
這種抗晃電方法的特點是在晃電發(fā)生期間主觸頭斷開,電壓恢復后電動機重起動,電動機重起動產生的沖擊電流大,控制回路原理復雜,而且電動機再起動器的成本很高。
(2) 采用儲能延時元件對接觸器的線圈在晃電期間繼續(xù)提供能量,保證主觸頭的吸合。這種抗晃電方式有選型不靈活、選擇范圍小、增加了控制線路的復雜程度等缺點。
(3) 延時鎖扣頭裝置,在接觸器吸合后線圈轉入省電模式,靠鎖扣頭鎖扣作用保持主觸頭的接通狀態(tài)。晃電發(fā)生時,接觸器主觸頭不斷開,在進行正常的停機操作后主觸頭才斷開。但這種鎖扣頭只能與專門設計的特殊接觸器配合使用,并且在斷電的情況下由鎖扣頭鎖定的主觸頭斷開需要獨立的電源。對于> 170 A 的接觸器,并沒有與之配套的鎖扣裝置。
(4) 采用雙電源供電方式,成本高、線路復雜。目前市面上出現(xiàn)了少量的抗晃電交流接觸器產品,但是價格居高,同等容量的抗晃電交流接觸器是原交流接觸器產品價格的5 倍左右。
因此,本文研發(fā)了新型抗晃電智能交流接觸器產品,該抗晃電智能交流接觸器采用接觸器本體和智能控制模塊的結構。智能控制模塊具有體積緊湊小巧、控制精確、通用性強、成本低等優(yōu)點;同時,通過對接觸器的起動、分斷過程進行智能控制,大幅度提高了接觸器的機械壽命和電壽命,配合不同的接觸器本體,可形成系列抗晃電智能交流接觸器產品,具有較高的性價比。
1 工作原理
抗晃電智能交流接觸器除了具有智能交流接觸器的功能外,還具有抗晃電、遠程控制等功能,其控制原理如圖1 所示。
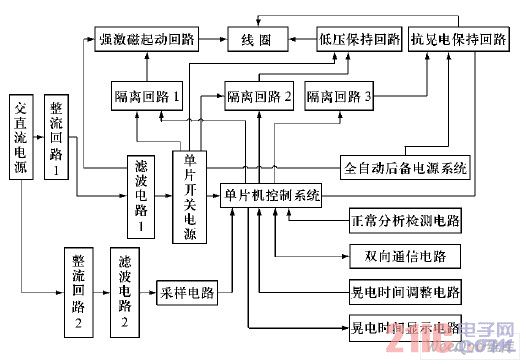
圖1 抗晃電智能交流接觸器的硬件框圖。
通過采樣電路對電源電壓進行采樣,當采樣電壓高于0. 7 Ue( Ue為額定電壓值) 且小于1. 15Ue時,單片機控制系統(tǒng)發(fā)出信號給隔離回路1,強激磁起動回路接通,接觸器高電壓起動。單片機給隔離回路2 發(fā)出驅動信號,低壓保持回路接通,接觸器低電壓保持,然后驅動回路1 斷開,退出運行。
當采樣電壓低于0. 6 Ue時,視為晃電故障發(fā)生,單片機發(fā)出信號給隔離回路3 和隔離回路2,先后打開抗晃電保持回路和分斷低壓保持回路,由全自動后備電源系統(tǒng)對單片機系統(tǒng)和線圈供電,使接觸器保持吸合狀態(tài),此時采樣回路繼續(xù)對電源電壓進行采樣,若在規(guī)定的時間內,晃電結束,電壓恢復正常,則單片機發(fā)出信號給隔離回路2 和隔離回路3,先后打開低壓保持回路和分斷抗晃電保持回路,恢復接觸器的正常保持狀態(tài),若經N ms(N 可調)電壓仍未恢復,則單片機發(fā)出信號給隔離回路3,斷開抗晃電保持回路,接觸器分斷。
若電源正常時手動分斷接觸器,則正常分斷檢測電路會檢測到手動分斷信號,此時單片機屏蔽抗晃電程序,使接觸器立即分斷。
全自動后備電源系統(tǒng)由鎳氫充電電池和全自動充電電路組成,當抗晃電模塊工作時,充電回路檢測電池的電壓值,當電壓值低于設定最小值時,充電回路開始對電池充電,當電壓達到設定最大值時,停止對電池充電,并繼續(xù)循環(huán)檢測電池電壓值。電源正常時,可通過抗晃電時間調整電路對抗晃電時間進行調整,并顯示在兩位八段數(shù)碼管上,單片機自動存儲設定的時間,下次啟動時,默認加載上次設定值,時間調整范圍和調整梯度可根據(jù)用戶要求設置,當抗晃電時間調到0 時,系統(tǒng)關閉抗晃電功能,作為普通智能接觸器使用。
該智能模塊可工作在獨立和遠程兩種模式。
獨立工作模式時,不具備通信功能,遠程工作模式時,可以與上位機雙向通信。上位機可對智能控制模塊的接通、分斷及抗晃電時間進行遠程控制和調整,下位機可以將當前接觸器的狀態(tài)、抗晃電時間、有無晃電發(fā)生等信號傳給上位機。
2 軟件設計
本文單片機軟件部分采用C 語言進行編程,編譯器選用CCS PICC 編譯器,該編譯器的內部函數(shù)比較豐富,支持豐富的外圍設備,預備有標準輸入/輸出函數(shù),編程比較方便,將CCS C 集成到mplab 中使用,進行程序的調試、燒錄、運行。
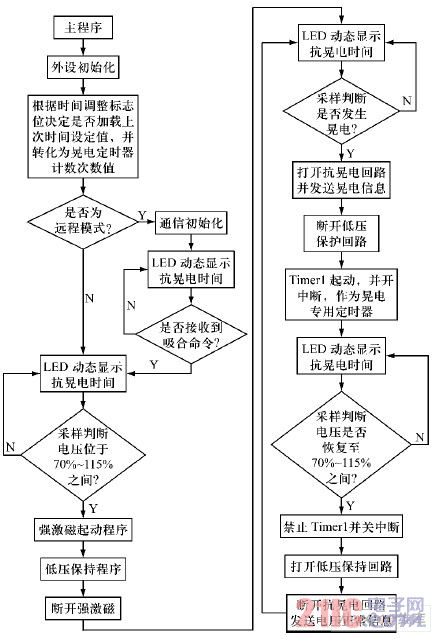
圖2 抗晃電智能交流接觸器的主程序流程圖
軟件流程如圖2 所示,經過調試后,軟件實現(xiàn)了抗晃電智能交流接觸器的整體控制功能。完成了接觸器的抗晃電初值加載、工作模式判斷、閾值判斷、正常高壓起動、低壓保持過程后,開始執(zhí)行晃電檢測程序,循環(huán)檢測電源電壓,檢測到晃電,則打開定時器1 作為專用的抗晃電定時器并開中斷,利用定時器1 的周期性中斷,在定時中斷子程序中執(zhí)行抗晃電延時時間的計時,晃電時間超過設定值時斷開抗晃電回路,在設置的抗晃電時間內電源恢復正常,則接觸器轉入正常保持狀態(tài),并繼續(xù)檢測晃電;時間調整子程序采用中斷的形式,可對抗晃電時間進行上調或者下調,并把調整后的時間存入E2PROM,以備下次啟動時調用。
通信接收程序也采用中斷形式,串口調試助手的操作界面如圖3所示,可對下位機發(fā)送操作指令,進行通斷控制及抗晃電時間的調整,并可以實時監(jiān)測當前接觸器的工作狀態(tài),文本框用于顯示上位機的發(fā)送指令和從下位機接收的指令,還可顯示當前設置的抗晃電時間和當前接觸器的狀態(tài)值;正常分斷檢測模塊也采用中斷的形式,利用單片機內置的* 模塊的捕捉功能,捕捉一個正常分斷信號后,立即轉入中斷執(zhí)行正常分斷程序。

圖3 串口調試助手。
3 調試與試驗數(shù)據(jù)
本文選用proteus 軟件作為仿真調試工具,proteus 是一款兼容性很高的軟件,可以集成到mplab 環(huán)境中,由mplab 調用proteus,在mplab 環(huán)境中支持斷點和單步調試,能反應出程序的運行過程。proteus 中虛擬示波器的仿真波形如圖4所示。
圖4 proteus 仿真波形。
為了模擬晃電電壓,選用一個DC 分段型脈沖激勵源接入單片機的RA1 模擬通道,虛擬示波器中第一條曲線表示DC 分段型脈沖激勵源,模擬采樣電壓;第二條表示強激磁回路,第三條表示低壓保持回路;第四條表示抗晃電保持回路;豎線①表示采樣電壓達到閾值,豎線②表示發(fā)生晃電時刻,豎線③、④表示電壓恢復時刻,由圖4 可以看出,DC 脈沖激勵源達到閾值后,強激磁回路打開一極短時間(15 ms 左右) 后關閉,繼而低壓保持回路打開(第三條曲線置高電平),接觸器完成正常起動及保持過程;此后電壓雖然有波動,但位于晃電界限以上,接觸器仍然處于低壓保持狀態(tài)(第三條曲線保持為高電平),本文電源模塊采用單片開關電源,具有寬電壓輸入的特點,因此,即使電壓輕微下跌,在實際中仍能輸出穩(wěn)定電壓,使實際中的接觸器處于穩(wěn)定的低壓保持狀態(tài)。
如圖4 所示,當電壓下降到額定值的60%時,即認為發(fā)生晃電,此時抗晃電回路打開( 第二條曲線在發(fā)生晃電時刻即時刻②置高電平),低壓保持回路關閉(第三條曲線發(fā)生晃電時刻即時刻②置低電平);當晃電在設定時間內結束電壓恢復正常時,低壓保持回路打開( 第三條曲線在電壓恢復時刻即時刻③置高電平),抗晃電回路關閉(第二條曲線在電壓恢復時刻即時刻③置低電平)。在時刻④位置之前的一次晃電,晃電發(fā)生時間超過預設的抗晃電延時時間,在整個延時時間范圍內,抗晃電保持回路置高電平,延時時間超過預設值后立即跳變?yōu)榈碗娖剑藭r接觸器分斷。由虛擬示波器的波形圖可知該智能控制模塊程序具有抗晃電功能。
在此基礎上,完成了整體硬件電路的安裝與調試。樣機硬件實物如圖5 所示,可以看出抗晃電智能控制模塊由三塊PCB 板構成,配合160 A以下的交流接觸器可穩(wěn)定工作。

圖5 樣機硬件實物圖。
驅動回路測試波形如圖6 所示。圖6( a) 和圖6(b) 為采樣電壓波形、強激磁驅動信號、低壓保持驅動信號,通過這三條的波形的對比可得出:
系統(tǒng)上電瞬間,采樣電壓達到吸合閾值,強激磁回路控制端瞬間置高電平,接通強激磁回路,接觸器線圈接220 V 高電壓,進行吸合動作;吸合過程結束后,低壓保持回路控制端置高電平,強激磁回路控制端跳變?yōu)榈碗娖剑油ǖ蛪罕3只芈罚瑫r斷開強激磁起動回路,接觸器在低電壓下保持吸合狀態(tài),完成接觸器的高壓起動、低壓保持過程控制。
圖6( c) 中當連續(xù)晃電( 第一條曲線電壓下跌)且每次晃電時間都在設定值內時,抗晃電回路都能及時打開(第二條曲線在第一條曲線下跌時置高電平),當電壓恢復正常時,抗晃電回路又能及時切斷(第二條曲線置在第一條曲線電壓恢復時置低電平),圖6(d) 中,當連續(xù)晃電時,低壓保持回路與抗晃電回路的信號波形是互補的;當晃電發(fā)生且晃電時間在設定值之內時,低壓保持回路切斷,抗晃電回路打開;當電壓恢復時,低壓保持回路打開,抗晃電回路切斷;圖6( d) 中最后一次晃電時,晃電時間超過預設值,低壓保持回路切斷,抗晃電保持回路打開并且保持到預設時間后切斷,此時低壓保持回路仍是切除狀態(tài),接觸器線圈失電,接觸器斷開。至此,完成了抗晃電智能交流接觸器的整體調試,形成了高電壓直流起動、低電壓直流保持、抗晃電、具有故障延時時間設定、節(jié)能無聲運行等特點的新型智能電器,具有工作穩(wěn)定、性價比高等特點。

圖6 驅動回路測試波形圖。
4 結語
該模塊具有寬電壓輸入、交直流通用、直流高電壓起動、直流低電壓保持、節(jié)能無聲運行、抗晃電延時分斷、斷電立即分斷、可通信等功能,將其與不同的接觸器本體配合,可形成系列抗晃電智能交流接觸器產品。