
1. 引言
當(dāng)今,在工業(yè)、國(guó)防等自動(dòng)化領(lǐng)域,液壓伺服系統(tǒng)以其重量輕、體積小、產(chǎn)生力矩大等優(yōu)點(diǎn)而得到廣泛應(yīng)用。但由于漏油、油液污染等因素影響,液壓伺服系統(tǒng)中普遍存在參數(shù)時(shí)變、非線性尤其是閥控動(dòng)力機(jī)構(gòu)流量非線性等現(xiàn)象。隨著對(duì)控制精度要求的提高,對(duì)液壓伺服控制技術(shù)也提出了越來(lái)越高的要求。傳統(tǒng)PID控制很難達(dá)到滿意的控制效果,針對(duì)這一問(wèn)題,近年來(lái)出現(xiàn)了許多不同的現(xiàn)代控制策略,如神經(jīng)網(wǎng)絡(luò)控制、自適應(yīng)控制、模糊控制、預(yù)測(cè)控制等。這些控制方法在理論上取得很大進(jìn)步,但是在液壓伺服控制中還有一些實(shí)際問(wèn)題需要解決[1]。
模糊控制不需要被控對(duì)象的精確數(shù)學(xué)模型,并且可以引入專家經(jīng)驗(yàn),因此有較好的實(shí)用性。但單獨(dú)使用模糊控制不易消除穩(wěn)態(tài)誤差,且對(duì)控制器運(yùn)算性能要求較高[2],而PID算法簡(jiǎn)單又可以較好的消除穩(wěn)態(tài)誤差。對(duì)此,本文采用模糊控制與PID控制結(jié)合,利用模糊控制實(shí)時(shí)修正PID參數(shù),提高了系統(tǒng)的控制精度和魯棒性,有較好的實(shí)用性。
2. 液壓位置伺服系統(tǒng)

如圖1所示,該液壓位置伺服系統(tǒng)由放大器、電液伺服閥、液壓缸、負(fù)載以及位置傳感器等組成。輸入信號(hào)經(jīng)放大后送入電液伺服閥,小功率電信號(hào)經(jīng)由伺服閥轉(zhuǎn)化為閥芯位移信號(hào),然后轉(zhuǎn)換成流量和壓力等液壓信號(hào),這些信號(hào)最后驅(qū)動(dòng)液壓缸帶動(dòng)負(fù)載完成指定動(dòng)作。
因電液伺服閥實(shí)現(xiàn)了電液信號(hào)的轉(zhuǎn)換和液壓功率放大兩個(gè)功能,故電液伺服閥在伺服系統(tǒng)中起橋梁的作用,是系統(tǒng)的心臟,本文中位置伺服系統(tǒng)采用動(dòng)鐵力矩馬達(dá)噴嘴擋板式兩級(jí)電液伺服閥。
根據(jù)力矩馬達(dá)的電壓、磁路和運(yùn)動(dòng)方程,噴嘴擋板位移與馬達(dá)的偏角關(guān)系以及主閥 (對(duì)稱四通滑閥)的運(yùn)動(dòng)方程和流量方程[3],可以推導(dǎo)出電液伺服閥傳遞函數(shù)如下:
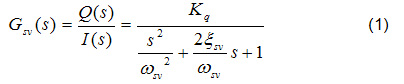
式中: ωsv為伺服閥固有頻率; ξsv為阻尼比; Kq為伺服閥流量增益,應(yīng)按實(shí)際供油壓力下的實(shí)際空載流量確定,即 , qn為伺服閥的額定流量, ps為實(shí)際供油壓力,psn為伺服閥規(guī)定閥壓降,一般psn=7MPa,In為伺服閥額定電流。
, qn為伺服閥的額定流量, ps為實(shí)際供油壓力,psn為伺服閥規(guī)定閥壓降,一般psn=7MPa,In為伺服閥額定電流。
此外,本文中執(zhí)行器為液壓缸,且負(fù)載為純慣量,不考慮機(jī)架剛度等因素,由運(yùn)動(dòng)方程可以推導(dǎo)出閥控缸傳遞函數(shù)為:

式中:Q0為伺服閥空載流量,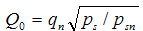 ,符號(hào)含義與前面相同; P為液壓缸活塞有效面積; ωh為液壓固有頻率;ξh為液壓阻尼比;
,符號(hào)含義與前面相同; P為液壓缸活塞有效面積; ωh為液壓固有頻率;ξh為液壓阻尼比;
通過(guò)上述推導(dǎo)得到液壓位置伺服控制系統(tǒng)中液壓被控部分的數(shù)學(xué)模型(1)(2),然后在使用PID控制的基礎(chǔ)上經(jīng)過(guò)模糊控制修正PID的比例、積分和微分三個(gè)參數(shù),這樣就可以保證系統(tǒng)在不同狀況下都處于最優(yōu)狀態(tài),從而提高了系統(tǒng)控制精度、有較好的實(shí)時(shí)性與魯棒性。如圖2所示為設(shè)計(jì)的液壓位置伺服模糊 PID控制系統(tǒng)方框圖。
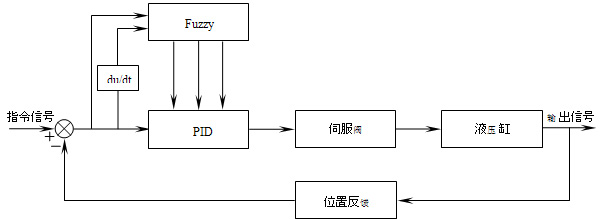
圖2 液壓位置伺服模糊PID控制系統(tǒng)
本文使用模糊控制方法實(shí)現(xiàn)對(duì)PID參數(shù)的在線調(diào)整,模糊控制的輸入為誤差 和誤差變化率 ,輸出為PID三個(gè)參數(shù)的調(diào)整量△kp 、△ki和△kd。根據(jù)液壓位置伺服系統(tǒng)設(shè)定 的基本論域?yàn)閇0.6,0.6], 的基本論域?yàn)閇0.3,0.3],其對(duì)應(yīng)模糊論域均取為{-3,-2,-1,0,1,2,3},故量化因子 現(xiàn)取誤差e和誤差變化率ec的模糊集E, EC={NB,NM,NS,Z,PB,PM,PB},且其隸屬度函數(shù)均如圖3所示:

圖3 誤差的隸數(shù)函數(shù)
模糊控制的輸出△kp 、△ki和△kd的模糊論域分別為{-3,-2,-1,0,1,2,3}、{-0.06,
-0.04,-0.02,0,0.02,0.04,0.06}、{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},并且其模糊集均為{NB,NM,NS,Z,PB,PM,PB}。三個(gè)輸出變量的隸屬函數(shù)同輸入誤差 和誤差變化率 相同,都用三角函數(shù),在此不一一列出。
在對(duì)精確量進(jìn)行模糊化后,根據(jù)各量的模糊集和隸屬函數(shù),采用MAX-MIN模糊推理可以分別推導(dǎo)出模糊輸出變量△kp 、△ki和△kd的模糊規(guī)則表,其中很重要的一點(diǎn)是必須根據(jù)理論知識(shí)和工程經(jīng)驗(yàn)考慮PID三個(gè)參數(shù)的作用及相互間的關(guān)系。
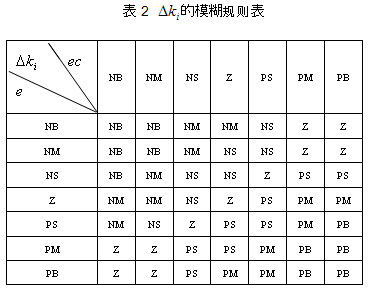
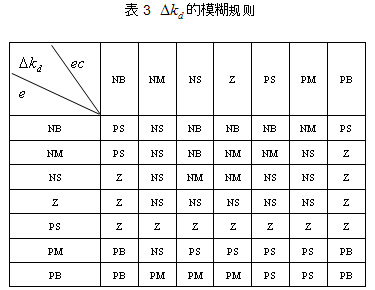
根據(jù)表1、2、3的模糊規(guī)則推理出的模糊輸出量,通過(guò)反模糊化即可得到PID三參數(shù)的實(shí)際精確量,從而實(shí)現(xiàn)對(duì)PID的在線調(diào)整。為實(shí)現(xiàn)更好的模糊控制效果,本文使用取中位數(shù)的反模糊化方法。
4. MATLAB仿真結(jié)果
選取DYC1-40L型電液伺服閥,其參數(shù)為:qn=40L/min,實(shí)際供油壓力
 。液壓缸參數(shù)為:
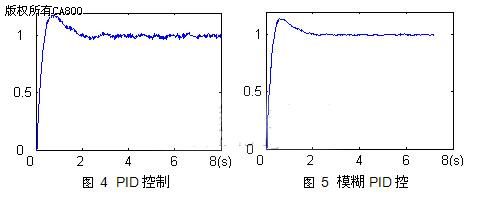
。液壓缸參數(shù)為: 。在Matlab中利用Simulink建立PID控制與模糊PID控制的階越響應(yīng)仿真模型,并加入幅值為1的白噪聲干擾來(lái)仿真模型的時(shí)變。仿真波形如下圖:
。在Matlab中利用Simulink建立PID控制與模糊PID控制的階越響應(yīng)仿真模型,并加入幅值為1的白噪聲干擾來(lái)仿真模型的時(shí)變。仿真波形如下圖:
 5. 結(jié)論
5. 結(jié)論
仿真結(jié)果顯示,PID設(shè)定參數(shù)相同的情況下,加入模糊控制實(shí)時(shí)修正PID的參數(shù),可以更好的控制被控對(duì)象。由圖4、圖5可以看到,PID參數(shù)一旦固定,在時(shí)變狀況下的適用性受到很大制約,而模糊PID通過(guò)在線自調(diào)整參數(shù),使控制性能一直保持在最優(yōu)狀態(tài)下,有更好的控制精度和魯棒性。此外,在調(diào)整模糊控制參數(shù)時(shí),應(yīng)特別重視量化因子與比例因子的作用。