
1 引言
自主式移動機(jī)器人集機(jī)械、電子、檢測技術(shù)與智能控制于一體IlJ。是目前國際機(jī)器人研究的熱點。基于移動速度和方向易于控制,輪式移動機(jī)器人是最為常見的移動機(jī)器人。移動機(jī)器人研究的重要課題就是:機(jī)器人向目標(biāo)方向移動中,能夠自動按照地面的導(dǎo)引線到達(dá)某一標(biāo)志物并完成相應(yīng)動作。針對這一課題近年來電子競賽中都有機(jī)器人自動尋導(dǎo)引線行走的題目翻。這也是移動機(jī)器人的標(biāo)準(zhǔn)問題之一,是解決移動機(jī)器人在自由環(huán)境自主行動的基礎(chǔ)。
以前尋線機(jī)器人設(shè)計中,其尋線控制系統(tǒng)一般采用如下方式:尋線傳感器信號直接輸入至控制器判斷是否偏離導(dǎo)引線,通過控制左右驅(qū)動輪的轉(zhuǎn)速差調(diào)整機(jī)器人在引導(dǎo)線上的位置,這種方法控制實現(xiàn)簡單,但機(jī)器人在引導(dǎo)線上將“搖擺”前進(jìn),針對傳統(tǒng)尋線系統(tǒng)這一缺點,基于模糊控制思想,這里設(shè)計一種新型基于多傳感器信息融合的尋線控制系統(tǒng),使尋線機(jī)器人可以平穩(wěn)地按照引導(dǎo)線行走。
2 傳感器結(jié)構(gòu)
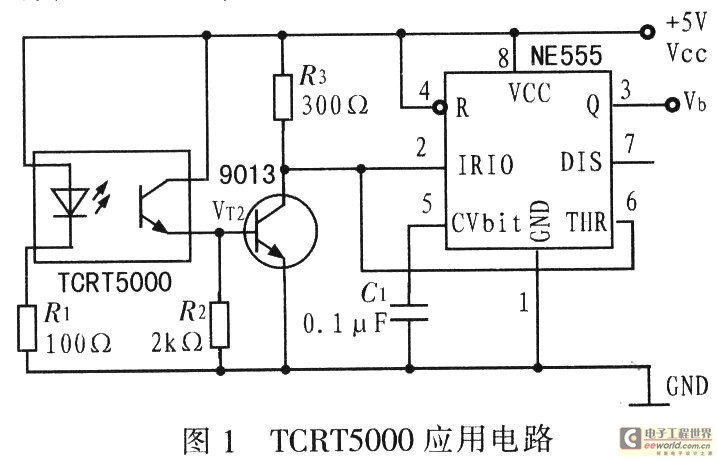
尋線傳感器技術(shù)主要是利用黑白兩種顏色對光的反射程度不同,采用發(fā)光二極管和光電三極管組成反射式傳感器檢測黑色導(dǎo)引線信息。本文用反射式光電傳感器TCRT5000組成尋線傳感器模塊,其應(yīng)用電路如圖1所示。
改進(jìn)尋線控制系統(tǒng)主要是對傳感器模塊的結(jié)構(gòu)以及安裝形式相應(yīng)調(diào)整。傳統(tǒng)的尋線傳感器一般由3路或4路反射式光電傳感器組成,結(jié)構(gòu)簡單,但對導(dǎo)引線信息量獲取不足。該尋線傳感器模塊采用8路反射式光電傳感器,車體前端和后端各裝一個傳感器模塊。
3 模糊控制系統(tǒng)設(shè)計
模糊推理是對人腦邏輯推理能力的一種近似模擬,它首先通過模糊集和隸屬度函數(shù)來描述某事件或現(xiàn)象的模糊性以及不確定性,然后利用領(lǐng)域?qū)<业闹R建立模糊規(guī)則,通過各種模糊算子進(jìn)行模糊運(yùn)算,得出相應(yīng)的模糊結(jié)論,從而實現(xiàn)模糊推理系統(tǒng)的輸入和輸出之間的非線性映射,所以模糊推理實際上是一種不確定的近似推理。利用模糊推理多傳感器信息融合的基本步驟如下:
(1)傳感器選擇根據(jù)實際需要,選取適當(dāng)傳感器進(jìn)行檢測,獲取研究對象的有關(guān)信息,并對其信息進(jìn)行預(yù)處理。
(2)模糊推理系統(tǒng)設(shè)計此環(huán)節(jié)包括模糊隸屬函數(shù)和模糊推理規(guī)則的確定。按照各種隸屬函數(shù)的確定方法,用模糊集和隸屬函數(shù)描述傳感器信息;針對具體問題,利用專家的領(lǐng)域知識和經(jīng)驗確定模糊推理規(guī)則。
(3)模糊推理 通過各種模糊邏輯算子,計算每一條規(guī)則的結(jié)論,其中每條結(jié)論代表規(guī)則前件對規(guī)則的滿足程度。
(4)模糊合成通過上一步模糊推理,每條模糊規(guī)則都得到一個模糊結(jié)論,模糊合成是對模糊結(jié)論的綜合處理,最后得出總的結(jié)論。
(5)反模糊化通過各種反模糊化算法,將模糊推理融合的結(jié)果即模糊集隸屬函數(shù)轉(zhuǎn)化為一個精確值。
機(jī)器人的自主尋線行走是利用尋線傳感器檢測機(jī)器人偏離導(dǎo)引線的位置,即利用機(jī)器人的姿態(tài)偏差值調(diào)整左右驅(qū)動電機(jī)的行進(jìn)速度,從而調(diào)整尋線機(jī)器人的運(yùn)行軌跡,使其沿著導(dǎo)引線運(yùn)行。此特點恰好符合模糊控制的思想,所以機(jī)器人尋線系統(tǒng)控制器可以采用模糊控制器。
本模糊控制系統(tǒng)有兩個輸入變量,分別是前后尋線傳感器模塊檢測到的引導(dǎo)線信息,即iF,iB。模糊控制系統(tǒng)輸出為左右驅(qū)動電機(jī)的速度差,即通過調(diào)整兩個驅(qū)動電機(jī)的速度差來調(diào)整機(jī)器人在導(dǎo)引線上的轉(zhuǎn)角。
根據(jù)尋線傳感器的配置方式,對前后尋線傳感器每一路進(jìn)行編號,并按照尋線傳感器檢測到機(jī)器人相對導(dǎo)引線的姿態(tài)偏差,將傳感器的輸出轉(zhuǎn)換為16進(jìn)制的偏差輸出值,傳感器編號如表1所示。

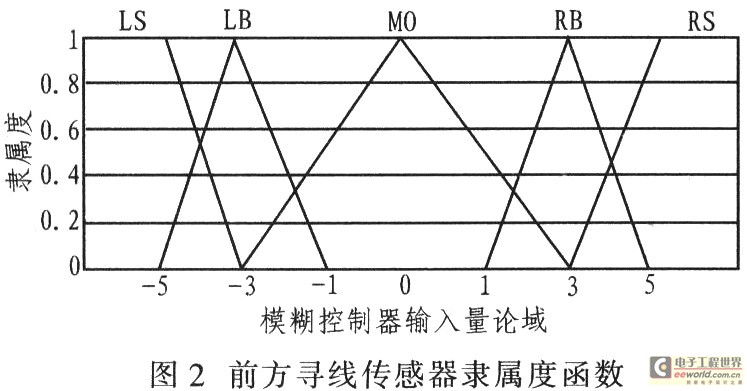
模糊控制器的輸入量的語言值模糊子集確定為{LB,LS,MD,RS,RB}。其中:LB=左大;LS=左小;MD=中心;RS=有小;RB=右大。設(shè)定模糊控制器輸入量論域為{一5,一3,一1,O,1,3,5},定義前方傳感器模塊(iF)的隸屬度函數(shù)如圖2所示(iB隸屬度函數(shù)與iF相同)。為計算簡單,本研究采用線性函數(shù),從而減少控制器的計算負(fù)擔(dān),提高數(shù)據(jù)處理速度。
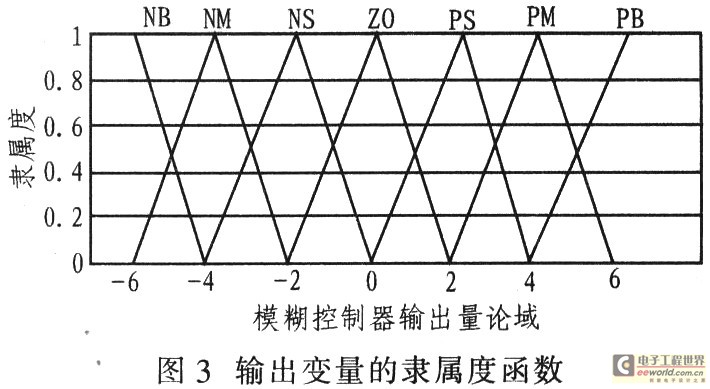
輸出量語言值模糊子集選取為:{NB,NM,NS,ZO,PS,PM,PB}。其中:NB=負(fù)大;NM=負(fù)中;NS=負(fù)小;Z0=零;PS=正小;PM=正中;PB=正大。設(shè)定模糊控制器的輸入量論域為[一6,一4,一2,0,2,4,6],定義輸出變量(OUT)的隸屬度函數(shù)(圖3)。
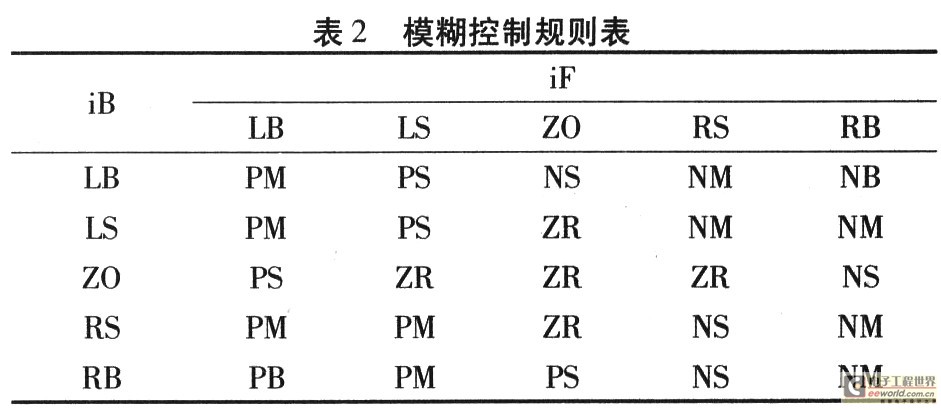
由表2得到的輸出結(jié)果是模糊量,模糊量一般不能直接控制被控對象,所以還需反模糊化。常用反模糊化法有最大隸屬度法、加權(quán)平均法、中位數(shù)法等。由于最大隸屬度法簡單易行,且算法的實時性好,故最后應(yīng)用最大隸屬度法對控制規(guī)則表進(jìn)行反模糊化處理,即針對每一個模糊控制器輸出得到一個左右驅(qū)動輪的速度差。
反模糊化處理后的數(shù)據(jù)不能直接應(yīng)用于程序中,理論上得到的反模糊化結(jié)果和實際調(diào)整效果之間還有一定偏差,該偏差需多次試驗來修正,即修正機(jī)器人左右控制輪的速度差,經(jīng)多次試驗最后得到控制程序段,其核心程序代碼如下:
Motor(1,1700,1,1400,1,0);//電機(jī)驅(qū)動函數(shù)(左輪正反轉(zhuǎn)控制,左輪速度,右輪正反轉(zhuǎn)控制,右輪速度,調(diào)整時間,系統(tǒng)控制)
case 0x18:
……
case 0x01:
……
case 0x02:
…… }
4 結(jié)束語
結(jié)合近年來電子設(shè)計大賽作品,深入分析傳統(tǒng)尋線控制系統(tǒng)的不足,在改進(jìn)硬件設(shè)計的基礎(chǔ)上,提出將模糊控制算法引入移動機(jī)器人尋線控制系統(tǒng)的設(shè)想,并在模糊控制理論的基礎(chǔ)上加以實現(xiàn),開發(fā)一種新型尋線機(jī)器人模糊控制系統(tǒng),在由模糊控制得到的相關(guān)控制規(guī)則的基礎(chǔ)上經(jīng)多次試驗和修正編寫相應(yīng)程序,實現(xiàn)了更準(zhǔn)確、更平穩(wěn)的尋線控制,解決了傳統(tǒng)尋線控制的“搖擺”前行問題,取得較理想的效果。