
隨著現(xiàn)代交通的發(fā)展,車(chē)牌自動(dòng)識(shí)別技術(shù)越來(lái)越成為智能交通的重要組成部分。車(chē)牌識(shí)別技術(shù)主要是采用計(jì)算機(jī)圖像處理技術(shù)對(duì)車(chē)牌的圖像進(jìn)行分析,以自動(dòng)提取車(chē)牌信息,確定車(chē)牌號(hào)。一般說(shuō)來(lái),在車(chē)牌自動(dòng)識(shí)別系統(tǒng)中,處理的關(guān)鍵技術(shù)問(wèn)題是車(chē)牌的定位及字符的分割。對(duì)于車(chē)牌自動(dòng)識(shí)別系統(tǒng)已經(jīng)提出了許多方法,如運(yùn)用多重特征的車(chē)牌定位算法,基于彩色和紋理分析的車(chē)牌定位方法,用神經(jīng)網(wǎng)絡(luò)算法進(jìn)行車(chē)牌自動(dòng)識(shí)別等。針對(duì)通過(guò)攝像頭動(dòng)態(tài)采集到的圖像有可能存在模糊、噪聲干擾等問(wèn)題,我們先用改進(jìn)模糊C-均值聚類(lèi)算法對(duì)采集到的圖像進(jìn)行分割,然后根據(jù)車(chē)牌區(qū)域的特點(diǎn)對(duì)車(chē)牌進(jìn)行定位。車(chē)牌定位后,根據(jù)車(chē)牌中字符的分布特點(diǎn),對(duì)字符進(jìn)行分割及識(shí)別。對(duì)于采集到的復(fù)雜背景的圖像進(jìn)行實(shí)驗(yàn)后,得到了較理想的車(chē)牌自動(dòng)識(shí)別效果。
1 車(chē)牌的定位
為提高聚類(lèi)的收斂速度,還需對(duì)隸屬度進(jìn)行修正,在半抑制式模糊C-均值聚類(lèi)算法(HSFCM)中引入了一抑制門(mén)限參數(shù)β,將最大隸屬度值uRj與該門(mén)限進(jìn)行比較,若其大于該門(mén)限,則對(duì)其進(jìn)行修正;否則就不對(duì)其修正。為了更好地提高聚類(lèi)的速度,將隸屬度修正公式變?yōu)椋?/p>
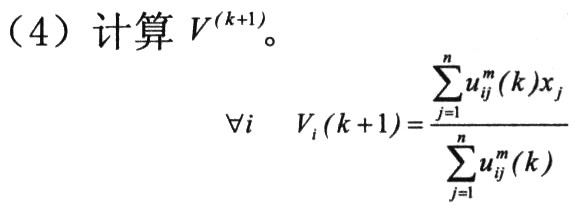
(5)如果||V(k)-V(k+1)||<ε,則停止,否則令k=k+1,重復(fù)步驟(2)、(3)、(4)、(5)。
1.2 車(chē)牌的定位
2 字符的分割
3 結(jié)論
車(chē)牌定位是車(chē)牌識(shí)別系統(tǒng)的核心,它是從一個(gè)復(fù)雜背景的圖像找到車(chē)牌所在的區(qū)域。為了更好對(duì)車(chē)牌加以定位,需先對(duì)采集到的圖像進(jìn)行分割。
1.1 用改進(jìn)的模糊C-均值聚類(lèi)算法進(jìn)行圖像分割
模糊C-均值(FCM)算法是常用的圖像分割方法,它是通過(guò)迭代法優(yōu)化目標(biāo)函數(shù)來(lái)實(shí)現(xiàn)圖像分割的,該算法的不足是收斂速度較慢。為了提高該算法的速度,已提出了不同的改進(jìn)FCM算法,在文獻(xiàn)[5]中,利用分層聚類(lèi)把圖像數(shù)據(jù)分成一定數(shù)量的色彩相近的子集,來(lái)提高FCM算法的計(jì)算速度。該改進(jìn)算法是通過(guò)減少聚類(lèi)樣本來(lái)提高聚類(lèi)的速度的。
在FCM算法中,初始聚類(lèi)中心及聚類(lèi)數(shù)目的選取對(duì)算法速度有一定的影響,較好的初始值,有助于提高聚類(lèi)的速度。聚類(lèi)中心與聚類(lèi)數(shù)目與圖像的灰度直方圖的極值點(diǎn)相關(guān)聯(lián)。對(duì)一幅較復(fù)雜的圖像,其灰度直方圖不是連續(xù)的圖形,直方圖中存在很多的毛刺,確定出的極值點(diǎn)一般有很多個(gè)。為了更有效地獲取其極值點(diǎn),我們對(duì)圖像的灰度值做如下處理,將灰度值為[h,h+n]間的像素的個(gè)數(shù)疊加在一起,其中n為灰度區(qū)間,這可以避免一些像素值較小的極值點(diǎn)出現(xiàn)。通過(guò)處理后的圖像灰度值col[i](其中0≤i≤255),來(lái)獲得灰度直方圖的極值點(diǎn)。當(dāng)col[i-1]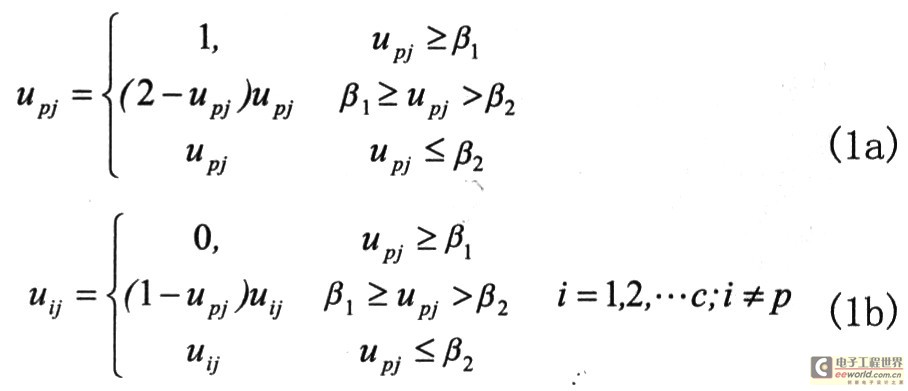
在式(1a),當(dāng)最大隸屬度值uRi大于門(mén)限值β1時(shí),uRi=1,轉(zhuǎn)為硬C聚類(lèi)算法;當(dāng)uRi小于門(mén)限值β2時(shí),不修正;當(dāng)β1≥uRj>β 2時(shí),uRj增加為原來(lái)的2-uRj倍,提高其隸屬度。在式(1b)中,將其它隸屬度做相應(yīng)的修改,以滿(mǎn)足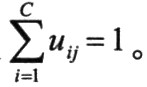
改進(jìn)后的模糊C-均值聚類(lèi)算法的具體操作步驟如下:
(1)對(duì)圖像進(jìn)行灰度處理,獲得灰度值的極值點(diǎn)及個(gè)數(shù)來(lái)初始化聚類(lèi)中心初始聚類(lèi)中心V(0)及聚類(lèi)數(shù)目C,并具體選取ε>0,令迭代次數(shù)k=0。
(2)計(jì)算U(K),如果∨j,r,drj(k)>0,則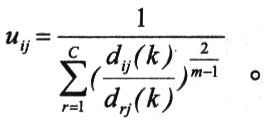
如果存在j,r,使得drj(k)=0,則令urj(k)=1,且i≠r,uij(k)=0。
(3)根據(jù)式(1a)、(1b),修正隸屬度矩陣U(k)。
對(duì)圖1所示的原始圖像中,處理后的灰度直方圖如圖2所示,獲得的極值點(diǎn)的個(gè)數(shù)(即聚類(lèi)數(shù)目)為4,聚類(lèi)中心灰度值特征量的初始化值分別為(21、66、141、186)。通過(guò)改進(jìn)FCM算法后,獲得分割后的圖像如圖3所示。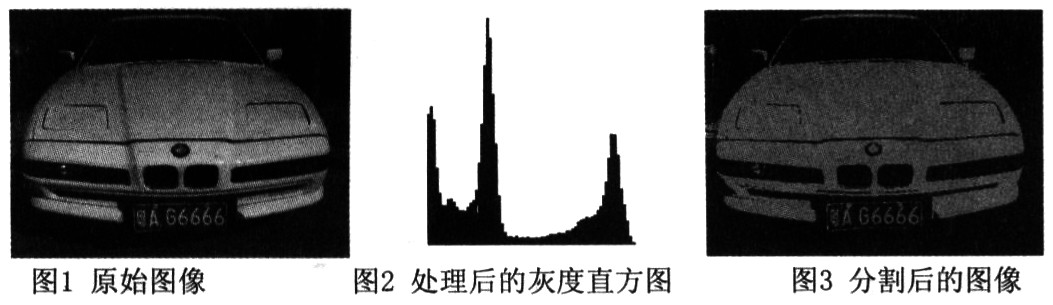
根據(jù)拍攝到的車(chē)牌圖像的特點(diǎn),牌照一般是在圖像的下方,且牌照下方多數(shù)是地面,在水平方向上,地面的圖像灰度分布比較均勻;而牌照區(qū)域由于圖像字符的分布,使得圖像灰度值在水平方向上的變化頻率比較大,且變化間隔較均勻。根據(jù)上面的分析,車(chē)牌從下至上來(lái)定位可以避免上面復(fù)雜背景的干擾,縮短定位時(shí)間。圖像不同部分的水平灰度值變化如圖4~7所示,其中圖4是車(chē)牌區(qū)域中字符下邊緣的與上邊緣的水平灰度值的變化(圖中白線(xiàn)所示),圖5是車(chē)牌區(qū)域外下邊緣與上邊緣的水平灰度值的變化。根據(jù)灰度值的變化便可定位出車(chē)牌的字符區(qū)域,如圖6所示。
經(jīng)過(guò)圖像分割后的車(chē)牌區(qū)域中,字符與牌照底的內(nèi)部灰度較均勻,而字符與底色在灰度上有較大差異,并且字符間有明顯的間距。根據(jù)這個(gè)特點(diǎn),將字符區(qū)域中字符像素的個(gè)數(shù)垂直投影來(lái)進(jìn)行字符的分割。設(shè)置一個(gè)閾值T用來(lái)區(qū)分字符與牌照底色,hhi(0≤i
根據(jù)hhi的值,當(dāng)
根據(jù)式(2)分割后的字符如圖8所示,分割效果比較明顯。
本文提出了一種改進(jìn)的模糊C均值聚類(lèi)算法用來(lái)對(duì)車(chē)牌圖像進(jìn)行分割,改進(jìn)算法中通過(guò)圖像灰度直方圖來(lái)初始化聚類(lèi)中心與聚類(lèi)數(shù)目,并對(duì)聚類(lèi)中的隸屬度做了相應(yīng)的修正。在車(chē)牌定位與字符分割中,結(jié)合車(chē)牌中字符的分布特點(diǎn),根據(jù)水平灰度值的變化曲線(xiàn),來(lái)實(shí)現(xiàn)車(chē)牌的定位;根據(jù)字符區(qū)域中字符像素個(gè)數(shù)的垂直投影,來(lái)實(shí)現(xiàn)字符的分割。本文中的算法采用VC++6.0編程實(shí)現(xiàn),并對(duì)多幅背景復(fù)雜的車(chē)輛圖像進(jìn)行了實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果表明該算法能夠較快、較準(zhǔn)確地獲得車(chē)牌自動(dòng)識(shí)別效果。