
摘要:為滿(mǎn)足埋弧焊過(guò)程弧長(zhǎng)實(shí)時(shí)穩(wěn)定控制要求,研制了以高速微處理為核心的微機(jī)控制系統(tǒng)和一套開(kāi)關(guān)式的送絲調(diào)速系統(tǒng)。引入通過(guò)模糊目標(biāo)隸屬函數(shù)調(diào)節(jié)修正函數(shù)來(lái)調(diào)整模糊控制規(guī)則的模糊控制算法,設(shè)計(jì)了以模糊控制為核心的埋弧焊過(guò)程電弧智能控制系統(tǒng)。在實(shí)驗(yàn)的基礎(chǔ)上討論了模糊控制的修正函數(shù)對(duì)系統(tǒng)性能的影響,合理的控制參數(shù)直接影響焊接質(zhì)量。實(shí)驗(yàn)表明,該系統(tǒng)采用模糊控制在焊縫成型以及過(guò)程穩(wěn)定等方面都有較大提高。
關(guān)鍵詞:埋弧焊;弧長(zhǎng);微機(jī)控制;模糊控制
l 前言
焊接過(guò)程電弧弧長(zhǎng)的穩(wěn)定對(duì)焊接質(zhì)量至關(guān)重要。目前,埋弧焊弧長(zhǎng)的調(diào)節(jié)控制主要有兩種:一種是實(shí)時(shí)調(diào)節(jié)電流改變焊絲熔化速度,從而控制弧長(zhǎng),抑制擾動(dòng);另一種是弧壓或電流反饋實(shí)時(shí)調(diào)節(jié)送絲速度,采用PID控制弧長(zhǎng)等參數(shù)以穩(wěn)定焊接過(guò)程。而這兩種方法在對(duì)粗絲大電流工作條件下存在動(dòng)態(tài)響應(yīng)慢、焊接過(guò)程穩(wěn)定性差等缺點(diǎn),難以實(shí)現(xiàn)高質(zhì)量控制。模糊控制作為一種智能控制策略,在弧焊電弧穩(wěn)定性控制的應(yīng)用具有諸多優(yōu)點(diǎn),如無(wú)需建立被控對(duì)象的數(shù)學(xué)模型,較易建立語(yǔ)言變量的控制規(guī)則,系統(tǒng)魯棒性強(qiáng),尤其適用于非線(xiàn)性、時(shí)變、滯后系統(tǒng)的埋弧自動(dòng)焊弧長(zhǎng)的控制。為此,在研究單片機(jī)控制的埋弧自動(dòng)焊裝備基礎(chǔ)上,引入基于修正因子的模糊控制策略,采用弧壓反饋方式,以送絲速度為控制量,弧壓為被控制量,研究埋弧自動(dòng)焊弧長(zhǎng)模糊控制器。
2 系統(tǒng)硬件設(shè)計(jì)
埋弧自動(dòng)焊系統(tǒng)硬件設(shè)計(jì)是由容量l 000 A、主頻20 kHz的IGBT逆變電源為主機(jī)、電源驅(qū)動(dòng)電路、送絲驅(qū)動(dòng)電路、單片機(jī)控制系統(tǒng)組成,如圖1所示。其中電源驅(qū)動(dòng)電路由以SG3525為核心的PWM脈寬調(diào)制電路、隔離電路、過(guò)流保護(hù)、過(guò)壓,欠壓保護(hù)電路組成。送絲驅(qū)動(dòng)控制電路由以SG3525為核心的開(kāi)關(guān)式調(diào)速電路組成。單片機(jī)及其外圍電路由以DS80C320為核心的微機(jī)系統(tǒng)、A/D轉(zhuǎn)換、D/A轉(zhuǎn)換、隔離電路、鍵盤(pán)給定顯示電路組成。

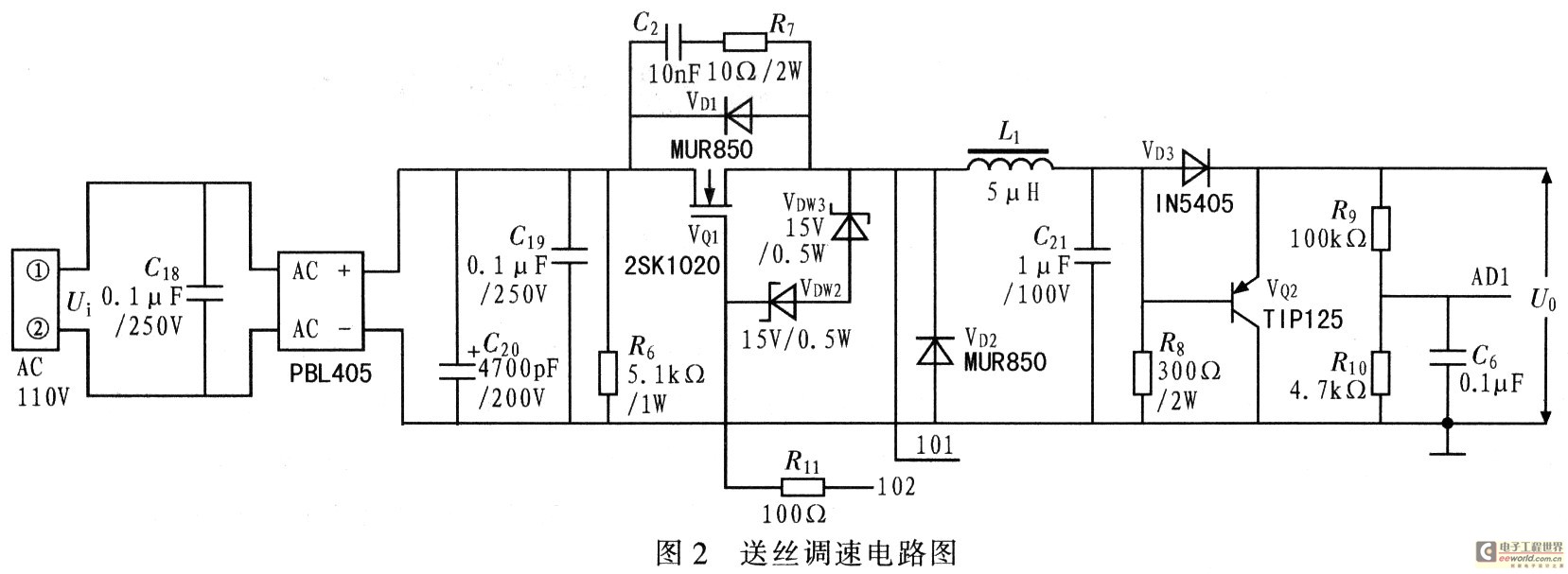
2.1 送絲調(diào)速電路
系統(tǒng)采用開(kāi)關(guān)式送絲調(diào)速系統(tǒng),送絲機(jī)驅(qū)動(dòng)為110 V直流印刷電機(jī)。其開(kāi)關(guān)式送絲調(diào)速系統(tǒng)的主電路如圖2所示。其工作原理:輸入電壓Ui經(jīng)整流濾波后為有紋波的直流電壓,然后提供給MOSFET,MOSFET由PWM控制電路提供的驅(qū)動(dòng)信號(hào)而處于開(kāi)關(guān)狀態(tài),將直流電壓轉(zhuǎn)換為脈沖電壓,再通過(guò)輸出電感得到輸出電壓U0,通過(guò)調(diào)節(jié)驅(qū)動(dòng)信號(hào)的輸出占空比,就可調(diào)節(jié)輸出電壓的大小。該電路的PWM控制電路采用脈沖寬度調(diào)制器SG3525得到PWM信號(hào),通過(guò)電樞電壓負(fù)反饋來(lái)保持電樞電壓的穩(wěn)定,從而實(shí)現(xiàn)轉(zhuǎn)速的自動(dòng)調(diào)節(jié)。該送絲系統(tǒng)經(jīng)實(shí)測(cè)送絲速度范圍為0~24 m/min,送絲平穩(wěn)可靠,可滿(mǎn)足埋弧焊的送絲和抽絲控制要求。

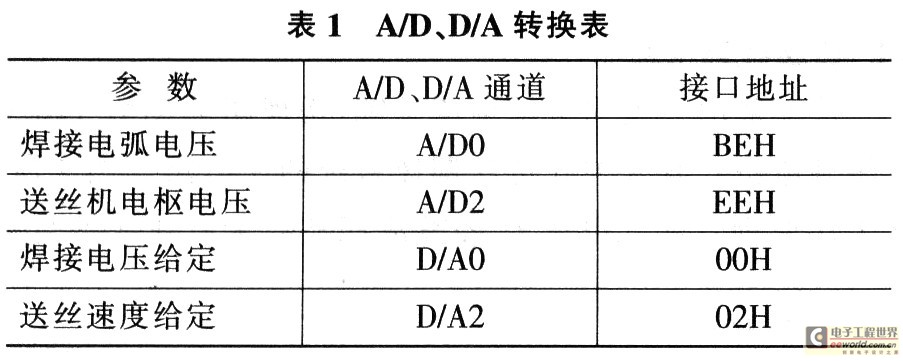
采樣電路采用MAX118。MAX118是MAXIM公司的8位8通道的跟蹤保持A/D轉(zhuǎn)換器,具有轉(zhuǎn)換速度高、功耗低、轉(zhuǎn)換誤差小的優(yōu)點(diǎn)。MAX118可直接與單片機(jī)數(shù)據(jù)總線(xiàn)和I/O接口連接,不需另加接口電路,主要用于焊接過(guò)程電弧電壓、送絲電動(dòng)機(jī)采樣,D/A轉(zhuǎn)換電路采用兩片AD7528。AD7528是德州儀器公司的雙路、8位數(shù)模轉(zhuǎn)換器,具有轉(zhuǎn)換速度快、線(xiàn)性度誤差小、功耗低的特點(diǎn)。兩片AD7528主要用于小車(chē)速度給定,送絲電機(jī)電驅(qū)電壓,電弧電壓給定,如表1所示。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)控制軟件是實(shí)時(shí)控制的核心,系統(tǒng)控制軟件設(shè)計(jì)采用模塊化程序設(shè)計(jì)技術(shù)。控制軟件主要由焊前準(zhǔn)備、引弧控制、焊接階段控制、收弧控制等4部分組成。
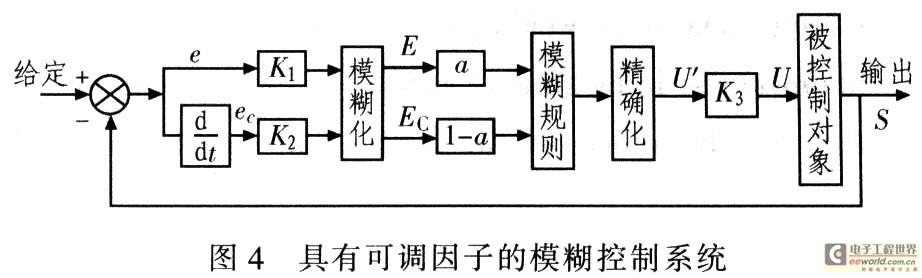
圖4示出該控制系統(tǒng)模糊控制原理。其中模糊控制器引入了帶自調(diào)整函數(shù)的模糊控制規(guī)則,即引入一個(gè)可調(diào)整因子a,代入FUZZY控制算法U=(E+Ec)/2可得:
U=[aE+(1-0)Ec] (1)
式中:a∈(0,1)。通過(guò)調(diào)整a,改變誤差E和誤差變化率Ec對(duì)控制量的加權(quán)程度,從而調(diào)整控制規(guī)則。進(jìn)而改善系統(tǒng)控制效果。
通常控制系統(tǒng)的目標(biāo)是輸出與給定相等,因此提出模糊控制目標(biāo)使誤差E靠近于0,取其隸屬函數(shù)為Cμ=exp(-ke2)。其修正系數(shù)為:

偏差大時(shí),a較大,系統(tǒng)能盡快消除E;偏差小時(shí),a較小,系統(tǒng)能盡快趨于穩(wěn)態(tài)。根據(jù)模糊目標(biāo)的隸屬函數(shù)調(diào)節(jié)a,從而達(dá)到調(diào)整控制規(guī)則的目的。可拋開(kāi)控制表,直接根據(jù)偏差E和偏差變化率Ec的論域值E和Ec,通過(guò)公式求得控制量U和論域U',從而實(shí)現(xiàn)對(duì)系統(tǒng)控制規(guī)則的在線(xiàn)調(diào)整。
在以單片機(jī)為控制器實(shí)現(xiàn)模糊控制時(shí),將變量離散化,歸一化量程:
焊接電弧電壓:51.2 V……FFH,即0.2 V……01H;送絲電機(jī)控制電壓:3.8 V……FFH,即0.023 V……01H。
采用公式計(jì)算方法,模糊控制實(shí)現(xiàn)程序如圖5所示。

4 實(shí)驗(yàn)
將編寫(xiě)好的模糊控制算法移植入單片機(jī),并與埋弧自動(dòng)焊焊機(jī)(1000逆變電源+變速送絲機(jī))組成試驗(yàn)平臺(tái),采用相同規(guī)范、不同K值進(jìn)行模擬負(fù)載和工藝實(shí)驗(yàn)。
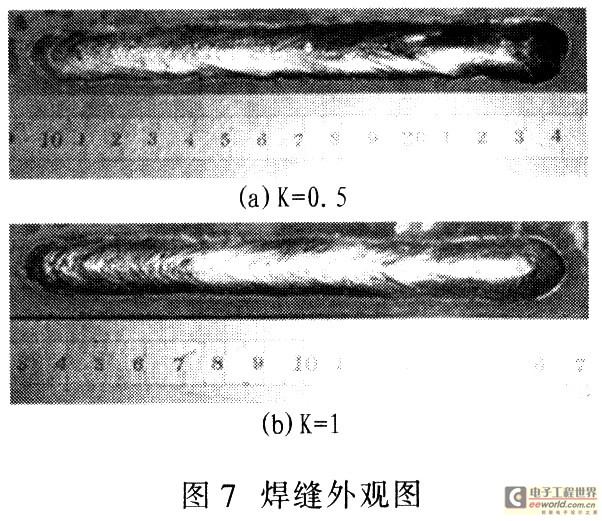
圖6(a)、(b)分別是在K=0.5和K=1、弧壓為35 V、電流600 A的情況下,初始模擬負(fù)載為0.03 Ω,突變后模擬負(fù)載為0.09 Ω實(shí)測(cè)的電壓響應(yīng)曲線(xiàn)。當(dāng)模擬負(fù)載突變時(shí),K=0.5的情況下,過(guò)渡時(shí)間約為0.075 s,當(dāng)K=1的情況下,過(guò)渡時(shí)間約為0.1 s,說(shuō)明模糊控制的送絲系統(tǒng)具有良好的動(dòng)特性和外特性。圖7(a)、(b)所示的是給定焊接電壓35 V,電流600 A,焊接速度為0.6 m/min,不同K值的焊縫外觀圖。

試驗(yàn)表明,采用模糊控制系統(tǒng),焊接過(guò)程穩(wěn)定,焊縫成型好,而且K值越大,修正函數(shù)a值隨著誤差遞增越快,誤差E的控制作用相對(duì)增強(qiáng),動(dòng)態(tài)響應(yīng)速度快。
5 結(jié)論
為滿(mǎn)足埋弧焊過(guò)程控制要求,研制了以單片機(jī)DS80C320為核心的微機(jī)控制系統(tǒng)和一套PWM可逆調(diào)速電機(jī)驅(qū)動(dòng)系統(tǒng),并引入了模糊控制算法,設(shè)計(jì)以模糊控制為核心的埋弧焊過(guò)程電弧智能控制系統(tǒng)。通過(guò)實(shí)驗(yàn)討論模糊控制的修正函數(shù)對(duì)系統(tǒng)性能和焊接質(zhì)量的影響。實(shí)驗(yàn)表明,采用模糊控制系統(tǒng)在焊縫成型以及過(guò)程穩(wěn)定等方面都有較大提高,模糊智能控制方式可有效運(yùn)用于埋弧焊過(guò)程控制。