
GPS是目前技術(shù)上最成熟且已實用的一種定位系統(tǒng),但是在GPS定位系統(tǒng)中,由于其是一個單向?qū)Ш较到y(tǒng),他是把星歷數(shù)據(jù)等傳給地面接收機,可在許多具體應(yīng)用時,例如在車輛調(diào)度系統(tǒng)中,一般都需要把利用GPS測得的信息數(shù)據(jù)傳到調(diào)度中心,由于其系統(tǒng)由一個基準站和多個用戶臺組成,基準站與用戶臺之間的聯(lián)系,即由基準站計算出的各種校正值發(fā)送到用戶臺,上邊這一切都需要用到數(shù)據(jù)鏈來完成數(shù)據(jù)的傳輸。其中,數(shù)據(jù)鏈由調(diào)制解調(diào)器和電臺組成。在無線數(shù)據(jù)傳輸系統(tǒng)中,調(diào)制解調(diào)器足一個關(guān)鍵部分,調(diào)制解調(diào)器(Modem)是將數(shù)據(jù)進行編碼和調(diào)制,然后輸入到電臺發(fā)射出去,用戶臺將其接收下來,并將數(shù)據(jù)解調(diào)后,送入GPS接收機進行改正。本文介紹了單片機控制Modem的原理和方法。
1 系統(tǒng)組成
本系統(tǒng)主要由單片機和調(diào)制解調(diào)器組成,單片機選用P89C58,其作為控制電路的主要部分,對K224芯片進行控制,并完成各個芯片的初始化工作,同時還有對數(shù)據(jù)進行交織糾錯編碼的功能。單片機與K224接口的連接如圖1所示。
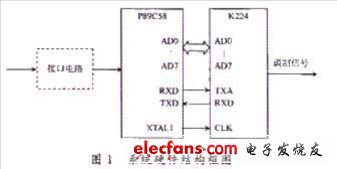
整個系統(tǒng)分為兩個部分,一部分為主呼結(jié)構(gòu),另一部分為應(yīng)答結(jié)構(gòu)。圖1只給出了主呼部分。工作時,先上電復(fù)位,由P89C58對K224進行初始化設(shè)置,并對其自身的串行口進行初始化。
整個系統(tǒng)的工作過程為:從GPS接收機接收下來數(shù)據(jù)后,經(jīng)過RS 232接口電路(即由MAX232構(gòu)成的電平轉(zhuǎn)換電路),變?yōu)門TL電平,送至P89C58的RXD端,P89C58對數(shù)據(jù)進行分組編碼、交錯編碼后,送到P89C58的TXD端輸出,此輸出信號送到K224的TXD,經(jīng)過調(diào)制后從K224的TXA端輸出調(diào)制信號。當接收機從RXA處接收到調(diào)制信號后,經(jīng)過K224處理,解調(diào)后由K224通過RXD端口送至P89C58的RXD接收端,由P89C58對數(shù)據(jù)進行反交織、解碼處理,此后,數(shù)據(jù)從單片機的TXD端口處送出去,再一次經(jīng)過ICL232的電平轉(zhuǎn)換,以RS232電平送至計算機進行計算分析。
2 單片機的初始設(shè)置
在本系統(tǒng)中,由于要用到P89C58對各個芯片進行初始化設(shè)置,并且還要利用其完成數(shù)據(jù)的交織糾錯功能,這就需要用到單片機的特殊功能寄存器進行設(shè)置,同時需要利用單片機內(nèi)部RAM的可位尋址區(qū)來完成交織編碼的功能。對于MCS-51系列的單片機來說,其特殊功能寄存器中對串行口進行控制的有SCON和PCON。PCON是電源控制寄存器,其中D7位SMOD為串行口波特率系數(shù)控制位,如SMOD=1,則波特率加倍。特殊功能寄存器SCON字節(jié)地址為98H,且可位尋址。SCON用來設(shè)定串行口的工作方式、接收發(fā)送控制以及設(shè)置狀態(tài)標志。
在串行口的4種工作方式中,主要用于擴展并行輸入輸出口。考慮到上述參數(shù),我們設(shè)置單片機工作于串行方式1,即一幀數(shù)據(jù)格式為:1個起始位、8個數(shù)據(jù)位、1個停止位、無奇偶校驗。由于單片機串行口4種工作方式中,并無2個停止位的數(shù)據(jù)格式,我們沒必要為了湊齊2個停止位而刻意采用方式3,用9位數(shù)據(jù)格式中的一位來代替停止位。另外,如節(jié)省下這1個停止位,由于GPS導(dǎo)航儀輸出的數(shù)據(jù)格式為2個停止位,而單片機工作于方式1,當其接收到1個停止位時,就認為一幀數(shù)據(jù)已接收完畢,從而就有了1個停止位的時間進行別的處理。對于波特率為2 400 b/s的數(shù)據(jù)來說,碼元寬度為1/2 400=0.42 ms,對于波特率為1 200 b/s的數(shù)據(jù),碼元寬度為1/1 200=0.83 ms。在本系統(tǒng)中,由于采用的是11.059 2 MHz晶振,其機器周期近似為1μs。比較后可以看出,節(jié)省下來的時間有一定的利用價值,從而有更多的時間去進行交織糾錯的編碼處理。由于系統(tǒng)工作時接收數(shù)據(jù)采用的是查詢方式,也即上電復(fù)位后,即不停地循環(huán)檢測有無數(shù)據(jù)輸入,直到檢測到有數(shù)據(jù)輸人為止。這樣,如有更多的時間進行數(shù)據(jù)處理,則不會因為處理數(shù)據(jù)而導(dǎo)致有些數(shù)據(jù)漏檢從而丟失了數(shù)據(jù)。
本系統(tǒng)中接收數(shù)據(jù)的波特率設(shè)定為1 200 b/s,2 400 b/s,采用定時器T1作為波特率發(fā)生器,T1工作于自動裝載方式的工作方式2,TL1作計數(shù)用,自動重裝的值放在TH1中時,溢出率可由下式確定:
溢出率=計數(shù)速率/[256-(TH1)]
其波特率由下式確定:
波特率=(定時/計數(shù)器1溢出率)/(32/2SMOD)
其中SMOD為特殊功能寄存器PCON中的第8位特殊位。3 交織糾錯編碼的設(shè)計
糾錯編碼是提高數(shù)字傳輸可靠性的一種技術(shù),是正確傳輸差分GPS改正信號的重要手段。數(shù)據(jù)在傳輸過程中,由于傳輸信道內(nèi)部噪聲及其造成的符號間干擾,以及傳輸外界環(huán)境的干擾,常常有突發(fā)性的錯誤發(fā)生。為了提高抗干擾能力,我們采用交織糾錯編碼來將一連串錯誤分散到多個碼字中去,然后再采用能夠糾正較少錯誤的碼字進行編碼,這樣就可能糾正有較長錯誤的碼字。例如,給定一個(n,k)線性分組碼,我們利用交織可以把長為bλ的單個突發(fā)錯誤分散到λ個(n,k)碼字中去,從而使每個(n,k)碼字中只有長度為b的突發(fā)錯誤,這就提高了系統(tǒng)抗干擾的能力,提高了系統(tǒng)的糾錯能力。
MCS-51單片機內(nèi)部數(shù)據(jù)存儲器一般為256 B,分為128 B的內(nèi)部數(shù)據(jù)存儲器和128 B的特殊功能寄存器。對于P89C58來說,其可尋址的數(shù)據(jù)存儲空問可擴展至上邊的128 B。在內(nèi)部數(shù)據(jù)存儲器中,20H~2FH(16個單元)作為一般工作單元,既可以由CPU按字節(jié)尋址,也可以按位直接尋址,進行位操作。我們正是利用了其中的20H~27H來構(gòu)成交錯編碼空間。 通過8×8個矩型數(shù)據(jù)單元,循環(huán)按行(列)放置數(shù)據(jù),然后再循環(huán)按列(行)讀出數(shù)據(jù),從而達到數(shù)據(jù)行進列出,或者列進行出,這樣完成交錯糾錯編碼。在這一過程中,需要注意時間的配合問題,數(shù)據(jù)的處理時問和數(shù)據(jù)的發(fā)送時間要協(xié)調(diào)一致,否者會導(dǎo)致數(shù)據(jù)不能正常接收。
4 調(diào)制解調(diào)器的設(shè)計
K224內(nèi)部共有8個8 b的寄存器,對K224的操作是通過對這8個寄存器進行初始設(shè)置,確定工作狀態(tài)來完成的。
2片Modem分別設(shè)置為工作于主呼和應(yīng)答方式、禁止INT(中斷)、經(jīng)擾碼器、禁止防衛(wèi)音、關(guān)應(yīng)答音發(fā)生器、關(guān)DTMF,同時接收發(fā)送采用同一判決平面,打開自適應(yīng)均衡器。
在Modem正常傳送數(shù)據(jù)之前,2個Modem以及Modem與DTE之間,為了確定雙方的速率等問題,需要進行必要的連絡(luò),這就是所謂的握手。在握手的過程中,微控制器P89C58必須檢測和確認確定的信號來控制握手的過程和Modem的狀態(tài)。微控制器P89C58讀取K224的檢測寄存器的比特位,但是僅僅檢測到某一比特位是預(yù)先的狀態(tài)(1或者0),就立即采取與該狀態(tài)有關(guān)的動作是遠遠不夠的。其中的原因有兩個:第一是在握手過程中,檢測到的信號必須要穩(wěn)定地持續(xù)一段時間;第二是因為有噪聲的干擾,某些比特位可能會發(fā)生由0到1或由1到0的突變。因此微控制器需要確認檢測寄存器的比特位的狀態(tài),并且繼續(xù)檢測此信號是否持續(xù)了相應(yīng)的時間。
為此,需要設(shè)計檢測握手序列的方法。本文采用的是增計數(shù)器的方法,即將信號應(yīng)持續(xù)的時間轉(zhuǎn)化為一個預(yù)置數(shù)值,然后設(shè)置一個計數(shù)器,每檢測到一個信號便加1,當增到預(yù)置數(shù)值時,才可認為該信號檢測到了。
具體計算方法如下:每個握手過程所需檢測的信號都有一個必須持續(xù)的時間,而這個信號到達接收機被檢測器檢測到要有一個延遲,用該信號的持續(xù)時間減去延遲時間,然后再用該信號的抽樣頻率乘以該數(shù)值,抽樣頻率應(yīng)大于或等于被檢測信號的數(shù)據(jù)率。上述程序設(shè)置是通過P89C58在系統(tǒng)七電復(fù)位后,對K224進行初始化的。圖2是系統(tǒng)工作的流程圖。

5 結(jié) 語
本系統(tǒng)經(jīng)過星研Star51PH單片機仿真器仿真,并通過TOP2005編程器編程后,結(jié)果證明系統(tǒng)是可行的,調(diào)制解調(diào)器接收在1 200 b/s可以完全穩(wěn)定接收發(fā)送,當工作在速率較大時,長時間工作數(shù)據(jù)會不能穩(wěn)定接收,需要進一步實驗驗證。該系統(tǒng)設(shè)計結(jié)構(gòu)簡單,性能穩(wěn)定可靠。