
關(guān)鍵字:Linux環(huán)境 ARM9 CAN總線通信
CAN(Controller Area Network)總線最早是由德國(guó)BOSCH公司提出,實(shí)現(xiàn)汽車(chē)環(huán)境中的微控制器通訊,在車(chē)載各電子控制裝置ECU之間交換信息,形成汽車(chē)電子控制網(wǎng)絡(luò)。由于其具有成本低,實(shí)時(shí)性好,容錯(cuò)性高,設(shè)計(jì)靈活等特點(diǎn),目前已被廣泛的應(yīng)用于各種工業(yè)領(lǐng)域,被公認(rèn)為是最有前途的現(xiàn)成總線之一。與此同時(shí),隨著ARM(Advanced RISC Machines)芯片及嵌入式Linux操作系統(tǒng)的成熟與完善,使得CAN通信的開(kāi)發(fā)更為便利,應(yīng)用更為廣泛。本文就將從硬件,軟件兩方面介紹一種在Linux環(huán)境下實(shí)現(xiàn)基于EP9315的CAN總線通信方式。
2. 硬件介紹及其接口實(shí)現(xiàn)
本設(shè)計(jì)選用的是Cirrus Logic公司推出的EP9315處理器及PHILIPS公司推出的SJA1000獨(dú)立CAN控制器。下面先對(duì)兩款芯片作簡(jiǎn)要介紹,再對(duì)CAN接口硬件電路設(shè)計(jì)作詳細(xì)說(shuō)明。
2.1 EP9315及SJA1000芯片簡(jiǎn)介
EP9315是EP93XX系列微處理器的旗艦產(chǎn)品。內(nèi)嵌先進(jìn)的運(yùn)行于200MHz(工業(yè)條件下推薦運(yùn)行184MHz)的ARM920T微處理器核,以及支持Linux,Windows CE等操作系統(tǒng)的存儲(chǔ)器管理單元MMU,16KB指令高速緩存和16KB數(shù)據(jù)高速緩存可為現(xiàn)有的程序和數(shù)據(jù)提供零等待時(shí)間,或者以鎖存的方式確保對(duì)關(guān)鍵指令和數(shù)據(jù)的無(wú)延遲存取。EP9315內(nèi)部集成了MaverickCrunch 數(shù)學(xué)協(xié)處理器和MaverickKey 硬件可編程ID,前者顯著提高了ARM920T的浮點(diǎn),整形運(yùn)算與信號(hào)處理能力,同時(shí)它還具有豐富的集成外設(shè)接口,包括1/10/100Mbps以太網(wǎng)MAC,3通道USB2.0全速主口,SPI、I S和AC’97串行接口,PCMCIA接口,Raster/LCD接口,圖像加速器,帶12位A/D轉(zhuǎn)換器的觸摸屏接口,鍵盤(pán)接口,UART接口,豐富的GPIO,支持4組32位SDRAM的無(wú)縫連接等。
SJA1000是一款高性能的CAN控制器,支持BasicCAN和PeliCANl兩種工作模式,提供INTEL和Motorola兩種尋址方式,地址線和數(shù)據(jù)線分時(shí)復(fù)用,SJA1000基于寄存器編址,可以通過(guò)讀寫(xiě)寄存器來(lái)操作它。
2.2 硬件接口電路設(shè)計(jì)
EP9315帶有16個(gè)增強(qiáng)型GPIO,可以通過(guò)配置PADR、PADDR寄存器使得EGPIO2控制SJ1000的ALE址鎖存信號(hào),EGPIO3接收SJA1000的中斷信號(hào),并且可以配置中斷類(lèi)型。由于SJA1000的數(shù)據(jù)線與地址線分時(shí)復(fù)用, 當(dāng)在送地址時(shí),RD、WR、CS信號(hào)必須無(wú)效,送數(shù)據(jù)或讀數(shù)據(jù)時(shí),RD、WR、CS信號(hào)才有效,因此結(jié)合CPLD(EPM7032芯片)或是一些邏輯門(mén)來(lái)實(shí)現(xiàn)該邏輯,并片選兩個(gè)BANK來(lái)分別用于地址操作(nCS5_PHYBASE 0x50000000)和數(shù)據(jù)操作(nCS3_PHYBASE 0x30000000)。當(dāng)讀SJA1000時(shí),首先由EP9315通過(guò)CS選通SJA1000,通過(guò)EGPIO2使得ALE有效,鎖存地址,并由CS5經(jīng)CPLD選通FLASH的BANK5,將地址存入映射后的BANK5區(qū)域,然后使得ALE為0取消地址鎖存,最后置低EP9315的RD信號(hào),經(jīng)74LV32后使得SJA1000的讀信號(hào)有效,完成讀操作;寫(xiě)操作時(shí),同理選通SJA1000,使能ALE,發(fā)送地址并將其鎖存在BANK5,然后取消ALE,置低EP9315的WR信號(hào),通過(guò)74LV32使能SJA1000的WR信號(hào),接著發(fā)送數(shù)據(jù)置映射后的BANK3,將數(shù)據(jù)寫(xiě)入SJA1000,完成寫(xiě)操作。
3. 軟件分析及實(shí)現(xiàn)
本文采用Linux系統(tǒng),內(nèi)核版本為2.4.21-rmk1,搭建ARM-LINUX交叉編譯環(huán)境同時(shí)利用動(dòng)態(tài)模塊加載法來(lái)進(jìn)行驅(qū)動(dòng)開(kāi)發(fā)。模塊化的優(yōu)點(diǎn)在于能將內(nèi)核映像尺寸保持在最小,并且具有最大的靈活性,便于檢驗(yàn)新的內(nèi)核代碼而不需重新編譯,引導(dǎo)內(nèi)核。Shell用戶應(yīng)用程序的開(kāi)發(fā)主要采用了GDB遠(yuǎn)程調(diào)試技術(shù),該調(diào)試環(huán)境由宿主機(jī)GDB和目標(biāo)機(jī)調(diào)試stub共同構(gòu)成,兩者通過(guò)串口或TCP連接。驅(qū)動(dòng)程序與應(yīng)用程序的整體流程圖如圖2所示。
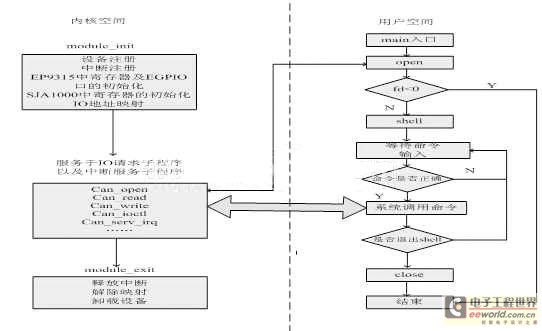
圖2 驅(qū)動(dòng)程序與應(yīng)用程序的整體流程
3.1 Linux下CAN驅(qū)動(dòng)的實(shí)現(xiàn)
CAN設(shè)備屬于字符型設(shè)備,是以字節(jié)為單位逐個(gè)進(jìn)行I/O操作的設(shè)備,在對(duì)它發(fā)出讀寫(xiě)請(qǐng)求時(shí),實(shí)際的硬件I/O緊接著就發(fā)生了。字符型設(shè)備的緩存是可有可無(wú)的,而且也不支持隨機(jī)訪問(wèn)。應(yīng)用程序可以通過(guò)標(biāo)準(zhǔn)系統(tǒng)調(diào)用像訪問(wèn)字節(jié)流(類(lèi)似文件)一樣來(lái)打開(kāi),讀,寫(xiě),關(guān)閉字符型設(shè)備。
驅(qū)動(dòng)程序主要由一下4個(gè)關(guān)鍵環(huán)節(jié)組成:
⑴模塊的初始化 module_init(Mysja1000_init)
模塊的初始化函數(shù)負(fù)責(zé)注冊(cè)模塊所提供的任何設(shè)施。module_init的使用是強(qiáng)制性的,這個(gè)宏會(huì)在模塊的目標(biāo)代碼中增加一個(gè)特殊的段,用于說(shuō)明內(nèi)核初始化函數(shù)所在的位置。沒(méi)有這個(gè)定義,初始化函數(shù)永遠(yuǎn)不會(huì)調(diào)用。當(dāng)模塊正常初始化時(shí),在初始化函數(shù)中完成了對(duì)CAN設(shè)備以及設(shè)備中斷的注冊(cè),對(duì)SJA1000芯片中相關(guān)寄存器的配置,對(duì)EP9315中的EGPIO口的初始化設(shè)置,并且利用函數(shù)void * __ioremap(unsigned long phys_addr, unsigned long size, unsigned long flags) 將IO地址空間映射到內(nèi)核的虛擬地址空間上去,這樣就可以像讀寫(xiě)RAM那樣讀寫(xiě)IO內(nèi)存資源了。
⑵服務(wù)于I/O請(qǐng)求的子程序
這部分程序又被稱(chēng)為是驅(qū)動(dòng)程序的上半部分。調(diào)用這部分程序是由于系統(tǒng)調(diào)用的結(jié)果。當(dāng)該部分程序執(zhí)行時(shí),系統(tǒng)仍認(rèn)為是與進(jìn)行調(diào)用的進(jìn)程屬于同一個(gè)進(jìn)程,只是由用戶態(tài)變成了核心態(tài)。由于此部分程序是驅(qū)動(dòng)程序與應(yīng)用程序的接口,所以必須通過(guò)Linux下的一個(gè)關(guān)鍵的數(shù)據(jù)結(jié)構(gòu)file_operations來(lái)實(shí)現(xiàn)該文件操作接口。file_operations結(jié)構(gòu)中的成員幾乎全是函數(shù)指針,實(shí)質(zhì)上是一個(gè)函數(shù)跳轉(zhuǎn)表。例如can_open入口點(diǎn)用來(lái)打開(kāi)CAN設(shè)備準(zhǔn)備進(jìn)行I/O操作;can_read入口點(diǎn)用來(lái)實(shí)現(xiàn)接收CAN數(shù)據(jù)幀;can_write入口點(diǎn)用來(lái)實(shí)現(xiàn)發(fā)送CAN數(shù)據(jù)幀;can_ioctl入口點(diǎn)提供了一種執(zhí)行CAN設(shè)備特定操作的方法,通過(guò)ioctl來(lái)實(shí)現(xiàn)對(duì)SJA1000寄存器的讀寫(xiě)操作,使用戶根據(jù)需要方便的配置SJA1000狀態(tài)等等。
⑶中斷服務(wù)子程序
這部分程序又被稱(chēng)為是驅(qū)動(dòng)程序的下半部分。Linux系統(tǒng)負(fù)責(zé)接收硬件中斷,再由系統(tǒng)調(diào)用中斷服務(wù)子程序,而不是直接從ARM的中斷向量表中調(diào)用這部分程序。在模塊初始化時(shí)已經(jīng)利用request_irq( )函數(shù)注冊(cè)了設(shè)備中斷,所以當(dāng)IRQ(中斷請(qǐng)求)產(chǎn)生時(shí),ISR(中斷服務(wù)例程)運(yùn)行。在中斷服務(wù)程序中,首先要讀取SJA1000的中斷寄存器IR的值,識(shí)別中斷源,比如當(dāng)接收中斷位RI為1則說(shuō)明是接收中斷,進(jìn)而調(diào)用接收函數(shù)來(lái)接收數(shù)據(jù)。當(dāng)CPU讀取這個(gè)只讀存儲(chǔ)器時(shí),除了RI位外的所有位都被復(fù)位。
⑷緩沖區(qū)操作
SJA1000內(nèi)部設(shè)有發(fā)送緩沖器TXB(13個(gè)字節(jié)),接收緩沖器RXB(13個(gè)字節(jié))和RXFIFO(64個(gè)字節(jié))。其中TXB是CPU和BSP(位流處理器)之間的接口,存儲(chǔ)發(fā)送到CAN網(wǎng)絡(luò)上的完整報(bào)文。接收緩沖器是接收過(guò)濾器和CPU之間的接口,用來(lái)接收和存儲(chǔ)CAN總線上的報(bào)文,RXB是RXFIFO的一個(gè)窗口,可被CPU訪問(wèn)。為了提高收發(fā)效率,在驅(qū)動(dòng)中開(kāi)辟軟件緩沖區(qū),大小可以根據(jù)需要設(shè)置,將大量數(shù)據(jù)經(jīng)過(guò)軟件緩沖區(qū)后再進(jìn)行處理。在操作軟件緩沖區(qū)時(shí),采用生產(chǎn)者/消費(fèi)者模型,分別設(shè)定數(shù)據(jù)存入與讀出的指針,并且利用memcopy函數(shù)完成對(duì)幀數(shù)據(jù)的操作。比如讀取數(shù)據(jù)時(shí),首先在操作模式下將SJA1000中起始地址為16的RXB數(shù)據(jù)讀入一個(gè)數(shù)組,經(jīng)過(guò)一些必要判斷,再將此數(shù)組中的數(shù)據(jù)由memcopy函數(shù)傳入指定的軟件緩沖區(qū)。硬件緩沖與軟件緩沖間一次傳遞一幀數(shù)據(jù),幀有標(biāo)準(zhǔn)幀與擴(kuò)展幀之分。
3.2 Shell應(yīng)用程序的實(shí)現(xiàn)
Shell應(yīng)用程序主要是為用戶提供一系列方便直觀的接口,使得用戶不必了解硬件工作的細(xì)節(jié),不必研究驅(qū)動(dòng)的具體實(shí)現(xiàn),而僅僅根據(jù)自身的需要,通過(guò)一些簡(jiǎn)單明了的命令來(lái)完成所要求的任務(wù)。本文就將在Shell應(yīng)用程序中實(shí)現(xiàn)以下命令功能:
init初始化寄存器,rsja讀取寄存器值,wsja寫(xiě)寄存器,gfrm收數(shù)據(jù)幀,sfrm發(fā)數(shù)據(jù)幀,conf配置濾波器,help幫助,exit退出。
在主函數(shù)main中,通過(guò)int open(const char * filename, int mode)函數(shù)打開(kāi)CAN設(shè)備,得到一個(gè)文件句柄fd,將此句柄傳遞給shell函數(shù),這樣就可以在各個(gè)命令函數(shù)中對(duì)CAN設(shè)備進(jìn)行操作,比如可以在函數(shù)int write_sja1000(int fd,unsigned char addr, unsigned char value)中使用ioctl(fd,SJA_WRITE,®_data)來(lái)實(shí)現(xiàn)對(duì)SJA1000寄存器的寫(xiě)操作。
在shell應(yīng)用程序中,可以設(shè)定一個(gè)字符數(shù)組char cmd[5],通過(guò)fgets(cmd,5,stdin)來(lái)接收用戶鍵入的命令,再經(jīng)過(guò)strcmp函數(shù)辨認(rèn)出用戶的命令類(lèi)型,執(zhí)行相關(guān)操作。為避免輸入緩沖區(qū)出現(xiàn)垃圾導(dǎo)致命令識(shí)別出現(xiàn)錯(cuò)誤,需要及時(shí)清空輸入緩沖,而當(dāng)gcc中fflush函數(shù)無(wú)效的情況下,則可以通過(guò)while((c=getchar())!='n'&&c!=EOF){ }來(lái)清空輸入緩沖。
完成了所有驅(qū)動(dòng)以及應(yīng)用程序的編寫(xiě)后,用Makfile文件制定編譯規(guī)則,然后根據(jù)規(guī)則進(jìn)行編譯,調(diào)試成功后可將二進(jìn)制代碼通過(guò)超級(jí)終端下載到板子運(yùn)行,至此結(jié)束所有工作。
4. 結(jié)語(yǔ)
本文提供了一種EP9315與CAN控制器SJA1000的接口方案,詳細(xì)分析了Linux操作系統(tǒng)下驅(qū)動(dòng)與應(yīng)用程序的原理及開(kāi)發(fā)流程,實(shí)現(xiàn)了CAN設(shè)備通信,并在實(shí)際應(yīng)用和測(cè)試中證明了該設(shè)計(jì)的正確性和可靠性。由于嵌入式Linux的眾多優(yōu)勢(shì)以及CAN的實(shí)時(shí)性,易用性,可靠性等優(yōu)點(diǎn),它們將在工業(yè)控制及生活的各個(gè)領(lǐng)域具有更廣泛的應(yīng)用前景。
本文作者創(chuàng)新點(diǎn):利用EP9315與SJA1000實(shí)現(xiàn)CAN總線通信,完成了由硬件連接,底層驅(qū)動(dòng)以致上層應(yīng)用軟件的所有工作,利用軟件方便穩(wěn)定的控制CAN通信。