
引言
近年來(lái),隨著微/納米技術(shù)的蓬勃發(fā)展,加工、測(cè)量都要求一個(gè)穩(wěn)定的環(huán)境,以提高加工、測(cè)量精度。然而振動(dòng)干擾無(wú)處不在,室外交通、室內(nèi)人員走動(dòng)、機(jī)械設(shè)備運(yùn)轉(zhuǎn)等均可能造成振動(dòng)干擾。大地產(chǎn)生的振動(dòng)頻率約為0.1~10 Hz,實(shí)驗(yàn)室人員走動(dòng)所產(chǎn)生的振動(dòng)頻率約為1~3Hz,一般建筑物的振動(dòng)頻率約在10~100 Hz之間。而且這些振動(dòng)都很難徹底消除,所以振動(dòng)的抑制與隔離就尤為重要。
振動(dòng)的抑制與隔離方法有多種,通常將振動(dòng)隔離技術(shù)分為被動(dòng)隔振技術(shù)和主動(dòng)隔振技術(shù)。音圈電機(jī)(Voice Coil Motor,VCM)是電磁線性電機(jī)中的一種,最早用于擴(kuò)音器。因其具有結(jié)構(gòu)簡(jiǎn)單、直接驅(qū)動(dòng)、維護(hù)容易等優(yōu)點(diǎn),并具有良好的加速、減速性能,所以VCM激勵(lì)器常用于需要快速、運(yùn)動(dòng)受控的設(shè)備等場(chǎng)合,如DVD中的伺服控制、硬盤(pán),以及攝像機(jī)鏡頭等。本文選用VCM作為低頻主動(dòng)隔振系統(tǒng)中主動(dòng)吸振器的驅(qū)動(dòng)器,并給出了軟、硬件設(shè)計(jì)方法。
1 系統(tǒng)硬件設(shè)計(jì)
VCM控制系統(tǒng)硬件電路采用TI公司的TMS320F2812(以下簡(jiǎn)稱F2812)作為控制系統(tǒng)核心。該芯片是一款功能非常強(qiáng)大的32位定點(diǎn)DSP芯片,既具有數(shù)字信號(hào)處理能力,又具有強(qiáng)大的事件管理能力和嵌入式控制功能。時(shí)鐘頻率為150 MHz,能夠滿足系統(tǒng)實(shí)時(shí)性要求。另外,該芯片還支持96個(gè)外部中斷、豐富的外部存儲(chǔ)器接口等。VCM控制系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
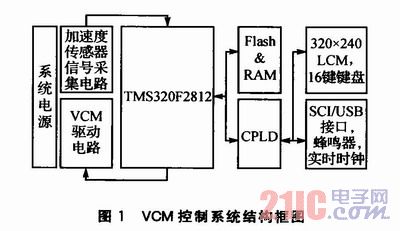
圖1中,電源模塊為系統(tǒng)提供各種規(guī)格的電源需求;DSP最小系統(tǒng)模塊是控制系統(tǒng)的運(yùn)算處理核心;數(shù)據(jù)存儲(chǔ)模塊分別采用IS61LV25616AL和SST39VF800Q擴(kuò)展了8 MbFlash和4 Mb RlAM;CPLD擴(kuò)展模塊采用EPM3256A系列的CPLD擴(kuò)展了人機(jī)交互模塊和RS232和USB2.0通信模塊;加速度傳感器信號(hào)采集電路是主動(dòng)隔振系統(tǒng)的振動(dòng)干擾檢測(cè)模塊,即控制系統(tǒng)的前向通道;VCM驅(qū)動(dòng)電路模塊為控制系統(tǒng)的后向通道。
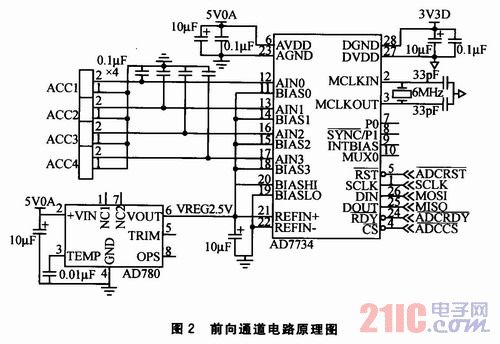
在主動(dòng)隔振系統(tǒng)中,采用的是ICP式加速度傳感器來(lái)檢測(cè)隔振平臺(tái)的振動(dòng)情況。傳感器的輸出為±5 V的電壓信號(hào),為了獲得足夠的分辨率和線性度,選用了ADI公司的24位∑-△ADC轉(zhuǎn)換芯片AD7734。其非線性度不超過(guò)±0.0025%,并具有SPI通信接口。通過(guò)配置AD7734的內(nèi)部寄存器,可以直接采樣加速度傳感器輸出的±5 V信號(hào)。前向通道的電路原理圖如圖2所示。其中,AD780是一款超高精度帶隙基準(zhǔn)電壓源,可以提供2.5 V輸出。
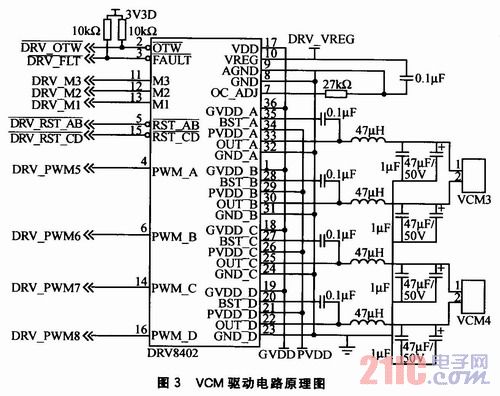
VCM驅(qū)動(dòng)電路原理如圖3所示。VCM是永磁式直線型電機(jī),改變線圈控制電壓的方向和大小,即可改變VCM的運(yùn)動(dòng)方向和定位位置,且其定位精度與控制信號(hào)的分辨精度密切相關(guān)。為了獲得較大的驅(qū)動(dòng)能力,選用了TI公司的雙全橋PWM電機(jī)驅(qū)動(dòng)芯片DRV8402。該驅(qū)動(dòng)芯片可以工作在500 kHz的切換頻率下,操作電壓為12~50 V,可持續(xù)輸出10 A電流,峰值電流高達(dá)24 A;能100%線性還原輸入的PWM,對(duì)控制精度無(wú)損。采用F2812的PWM輸出模塊與DRV8402配合使用,VCM的控制精度可達(dá)16位。
2 系統(tǒng)軟件設(shè)計(jì)
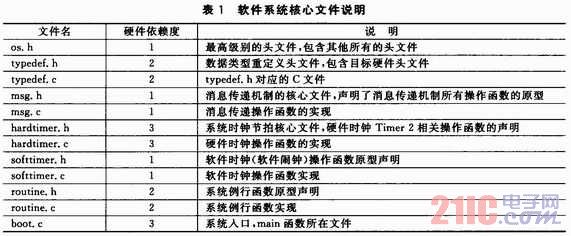
為了滿足控制系統(tǒng)的實(shí)時(shí)性要求,在參考μC/OS-I的基礎(chǔ)上,結(jié)合F2812的32位硬件定時(shí)器Timer 2,編寫(xiě)了一種基于時(shí)鐘節(jié)拍和消息機(jī)制的軟件系統(tǒng)。該軟件系統(tǒng)完全由C語(yǔ)言編寫(xiě)而成,對(duì)硬件的依賴度小,可以很方便地移植到其他的硬件平臺(tái)上。該軟件系統(tǒng)核心文件的說(shuō)明如表1所列。其中,硬件依賴度分為3個(gè)級(jí)別(1~3),數(shù)字越大依賴度越大。
核心文件之間的包含調(diào)用關(guān)系如圖4所示。其中,math.h為編譯器自帶的頭文件。
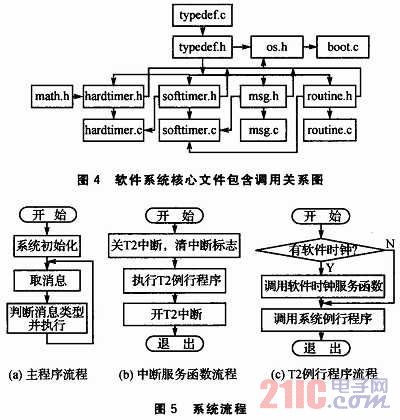
軟件系統(tǒng)的架構(gòu)可以用圖5所示的3個(gè)流程來(lái)表示。圖5(a)是主程序流程,即該軟件系統(tǒng)的前臺(tái)操作流程。在主程序的大循環(huán)(while(1){;})中,系統(tǒng)會(huì)不斷地從消息隊(duì)列中取消息,判斷消息類(lèi)型,然后根據(jù)消息類(lèi)型和消息值執(zhí)行相應(yīng)操作。圖5(b)是系統(tǒng)時(shí)鐘節(jié)拍的中斷服務(wù)函數(shù)流程。該時(shí)鐘節(jié)拍由硬件定時(shí)器Timer 2(T2)產(chǎn)生,節(jié)拍周期可調(diào),通常為20ms。每個(gè)時(shí)鐘節(jié)拍周期到了之后,系統(tǒng)中斷并進(jìn)人中斷服務(wù)函數(shù),執(zhí)行T2例行程序,這是系統(tǒng)的后臺(tái)操作。圖5(c)是T2例行程序的流程。進(jìn)入該例行程序,首先檢查有沒(méi)有軟件時(shí)鐘,如果有則調(diào)用軟件時(shí)鐘服務(wù)函數(shù),然后執(zhí)行系統(tǒng)例行程序。如果沒(méi)有,則直接調(diào)用系統(tǒng)例行程序。
軟件時(shí)鐘是一種基于系統(tǒng)時(shí)鐘節(jié)拍的定時(shí)操作,可以把它理解成鬧鐘,即每個(gè)一定時(shí)間都執(zhí)行某一操作,或僅是單次操作。軟件時(shí)鐘對(duì)應(yīng)的操作,可以送進(jìn)消息隊(duì)列在前臺(tái)執(zhí)行,也可以在中斷中執(zhí)行。但不宜把太多的軟件鬧鐘設(shè)為在消息隊(duì)列中執(zhí)行。
消息傳遞機(jī)制是該軟件系統(tǒng)前后臺(tái)配合的紐帶。所有后臺(tái)操作或外部請(qǐng)求都可以通過(guò)消息包的方式送進(jìn)消息隊(duì)列,然后在前臺(tái)以取消息、解消息的方式獲取需要處理的信息,然后執(zhí)行相應(yīng)的操作。目前,消息隊(duì)列是FIFO的方式,不支持優(yōu)先級(jí),在實(shí)際應(yīng)用時(shí)一定要保證消息隊(duì)列的容量足夠大。
結(jié)語(yǔ)
經(jīng)過(guò)實(shí)驗(yàn)調(diào)試,基于該VCM控制系統(tǒng)的低頻隔振平臺(tái)能有效地動(dòng)態(tài)抑制外界振動(dòng)干擾。此外,基于時(shí)鐘節(jié)拍和消息機(jī)制的軟件系統(tǒng)被多次移植到其他項(xiàng)目應(yīng)用上,均取得了良好的效果。