
摘 要: 提出一種通用工業(yè)控制器的標(biāo)準(zhǔn)結(jié)構(gòu),解決了模糊控制與PI控制之間的無擾動(dòng)切換問題,通過仿真驗(yàn)證該方案的有效性。
關(guān)鍵詞: PID調(diào)節(jié)器 模糊控制 復(fù)合控制
1965年,美國加州大學(xué)著名控制論專家L.A.扎德發(fā)表了開創(chuàng)性論文“Fuzzy sets”以來,模糊控制技術(shù)大致經(jīng)歷了三個(gè)發(fā)展階段。第一階段是1965~1974年,這是模糊數(shù)學(xué)發(fā)展與成形的階段。這一階段,扎德開創(chuàng)了“模糊集”,并發(fā)表了“模糊算法”和語言與模糊邏輯相結(jié)合的系統(tǒng)建立方法。1974年Mamdani博士首次嘗試?yán)媚:壿嫞晒Φ亻_發(fā)了世界上第一臺(tái)模糊控制的蒸汽引擎。第二階段大約為1974~1979年,這一階段產(chǎn)生了簡單模糊控制器。但這時(shí)的模糊控制器自適應(yīng)能力和魯棒性很有限,穩(wěn)定性也不夠理想。第三階段是1979年至今,這是發(fā)展高性能模糊控制器的階段。1979年T.J.Procky 和E.H.Mamdani共同提出了自學(xué)習(xí)的概念,使系統(tǒng)性能大為改善。
模糊數(shù)學(xué)70年代后期傳入我國,不久在我國得到了飛速發(fā)展。80年代中期,我國在模糊理論研究的同時(shí)開始了模糊控制技術(shù)的研制開發(fā)工作。我國在模糊控制的研究和開發(fā)著重于通用模糊控制系統(tǒng)的開發(fā)工作。模糊控制與傳統(tǒng)的控制相比,具有實(shí)時(shí)性好,超調(diào)量小,抗干擾力強(qiáng),自動(dòng)化程度高等優(yōu)點(diǎn)。
然而,常用的模糊控制器也有自身的缺點(diǎn),穩(wěn)態(tài)精度較低,這與輸出的離散控制量有關(guān)。在穩(wěn)態(tài)較小的變化范圍內(nèi),經(jīng)典的線性控制技術(shù)能夠較好地解決這一問題。PID控制器由于其結(jié)構(gòu)簡單,較好的魯棒性而得到廣泛應(yīng)用,為控制工程師所熟悉。線性控制與模糊控制相結(jié)合的方案不是新概念,早在1987年就有龐富勝[1]提出過,文獻(xiàn)[3]中也有所嘗試。從工程角度出發(fā),具體實(shí)現(xiàn)這種復(fù)合型控制器,使之成為與PID控制器結(jié)構(gòu)標(biāo)準(zhǔn),使用方便的新型控制器,并解決了兩種控制模塊之間的無擾切換問題。我們設(shè)計(jì)的復(fù)合型控制器,在基本模糊控制器部分,針對典型的工業(yè)控制對象,作了標(biāo)準(zhǔn)化處理,使可調(diào)參數(shù)減少,調(diào)節(jié)簡單。對這種新型控制器,我們利用Matlab5.0.2對同一類控制對象作了仿真實(shí)驗(yàn),以驗(yàn)證它的調(diào)節(jié)性能。
1 控制器結(jié)構(gòu)圖
該通用控制器由單回路控制器A、串級控制器B和PD-FC控制器C組成,具有強(qiáng)關(guān)強(qiáng)開、禁開禁關(guān)、限速限幅等功能。我們所研究的問題是模糊控制與傳統(tǒng)控制器的組合控制問題,即PD-FC的設(shè)計(jì)問題。
1.1 總體結(jié)構(gòu)
控制器總結(jié)構(gòu)如圖1所示。

1.2復(fù)合控制具體實(shí)現(xiàn)方案模塊細(xì)節(jié)
模糊邏輯控制模塊示意圖如圖2所示。PD與FC切換開關(guān)模塊示意圖如圖3所示。PD模塊及參數(shù)示意圖如圖4所示。

說明:k1*|e|+k2*|c(diǎn)|為切換所選的指標(biāo),“常數(shù)”為指標(biāo)參考值。0表示PI控制,1表示模糊控制。當(dāng)指標(biāo)小于參考值時(shí),比較輸出0,切換至PI精確控制。
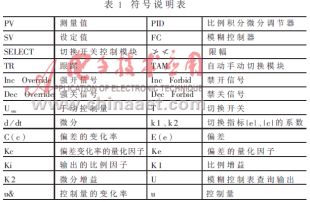
符號(hào)說明表如表1所示。
2 參數(shù)整定
復(fù)合型控制器的參數(shù)整定方法是將PD控制器與FC控制器參數(shù)單獨(dú)整定。PD控制器輸出經(jīng)積分后實(shí)際為PI控制器,F(xiàn)C控制器輸出經(jīng)積分后實(shí)際成為模糊PI控制器。由于切換時(shí),只有u&可能發(fā)生變化,u是連續(xù)變化的,不會(huì)產(chǎn)生控制量的擾動(dòng),因而可實(shí)現(xiàn)無擾切換。
對PID的整定方法,大家不會(huì)陌生,PID的整定方法與經(jīng)驗(yàn)公式有很多。其中著名的有:Ziegler-Nichols公式,Cohen-Coen公式,改進(jìn)的Ziegler-Nichols公式,ITAE/IAE/ISE最優(yōu)公式,內(nèi)部模型控制設(shè)計(jì)方法,增益與相角裕量設(shè)計(jì)方法等等[3]。具體整定方法,在此不再贅述。
模糊控制器中E,C,U的詞集為{NB,NM,NS,ZO,PS,PM,PB},量化論域E、C為{-6,-5,-4,-3,-2,-1,0,1 ,2 ,3 ,4,5,6},U的量化論域?yàn)閧-7,-6,-5,-4,-3,-2,-1,0,1 ,2 ,3,4,5,6,7}。各模糊子集的隸屬度為均勻的三角形分布,應(yīng)用模糊推理最大最小合成算法計(jì)算,去模糊化采用重心法計(jì)算。控制規(guī)則表如表2所示。
 ?
? 
?
計(jì)算得出模糊控制表后(如表3所示),不再修改,根據(jù)不同對象調(diào)節(jié)參數(shù)Kc,Ke和Ki以達(dá)到較好的控制效果。
3 仿真實(shí)驗(yàn)
實(shí)驗(yàn)對象傳遞函數(shù)為![]() ,這是比較常見的被控對象。取T=1,τ=10s進(jìn)行仿真。PD參數(shù)K1=0.08,K2=0.06;模糊PD模塊中Ke=6,Kc=30,Ki=0.01。
,這是比較常見的被控對象。取T=1,τ=10s進(jìn)行仿真。PD參數(shù)K1=0.08,K2=0.06;模糊PD模塊中Ke=6,Kc=30,Ki=0.01。
由實(shí)驗(yàn)曲線可以看出模糊控制調(diào)節(jié)時(shí)間短,超調(diào)量小,但由于輸出量化導(dǎo)致有一定的穩(wěn)態(tài)偏差;PI控制相對于模糊控制調(diào)節(jié)時(shí)間長,超調(diào)量大,但跟隨性能較好,最終為無差輸出;復(fù)合控制則綜合了二者的優(yōu)點(diǎn),使得系統(tǒng)動(dòng)態(tài)與穩(wěn)態(tài)性能都較好。本次實(shí)驗(yàn)切換模塊中k1=1;k2=50;常數(shù)為0.02;無擾切換次數(shù)為4次。實(shí)驗(yàn)曲線見圖5。

總之,線性與模糊的復(fù)合控制不是最新的概念,但把這個(gè)想法實(shí)現(xiàn)成為像PID一樣簡單可靠,性能較高的標(biāo)準(zhǔn)化控制器是我們的目的。兩種控制模塊中的無擾切換是變結(jié)構(gòu)控制中的關(guān)鍵問題。本文提出的PD-FC控制器的適用范圍仍是一個(gè)需進(jìn)一步研究的問題。
參考文獻(xiàn)
1 何平,王鴻緒.模糊控制器的設(shè)計(jì)及應(yīng)用.北京:科學(xué)出版社,1997
2 R.Ketata,D.DeGeest,A.Titli.Fuzzy controller:design,evaluation, parallel and hierarchical combination with a PID controller.Fuzzy Sets and Systems,1995;71:113-129
3 C.C.Hang,W.K.Ho.L.S.Cao.A comparison of two de-sign methods for PID controllers.ISA Transactions,1994;33:147-150