
目前,國內(nèi)客車烘房有燃油、燃氣(天然氣)、電加熱,以及蒸汽烘房等。烘房的溫度是生產(chǎn)工藝的一項重要指標。本課題研究的烘房類型為熱風對流型烘房,熱源為200℃的過熱蒸汽,溫度控制采用較為傳統(tǒng)的PID類調(diào)節(jié)器,通過溫控閥門調(diào)節(jié)蒸汽流量,控制烘房溫度。由于PID類調(diào)節(jié)器具有原理簡單,易于實現(xiàn)等優(yōu)點,因而在過程控制中得到廣泛的運用。始終占據(jù)過程控制的主導地位,但魯棒性能不理想,對大滯后和強干擾的過程表現(xiàn)出明顯的不足。模糊控制是一種無需建模、方便易懂、執(zhí)行簡便、開發(fā)成本低廉的非線性控制技術。由于具有這些優(yōu)點,本文擬將模糊控制技術應用于客車烘房的溫度控制,并做出了一些嘗試。
1 溫控儀原理框圖
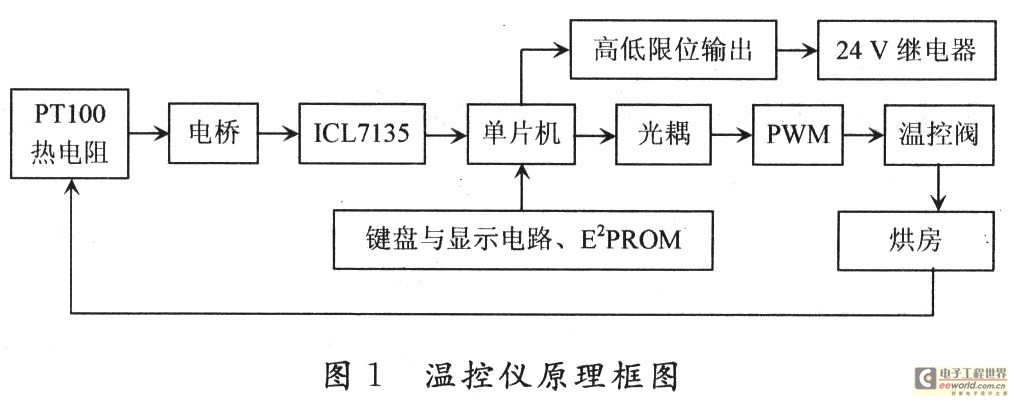
樣機以AT89C55WD單片機為核心,由鍵盤和LED顯示電路、單片機系統(tǒng)、控制信號隔離輸出電路、熱電阻、A/D轉換電路等幾部分組成,原理框圖如圖1所示。當系統(tǒng)工作時,通過鍵盤輸入溫度設定值,并在LED上顯示,然后單片機通過光耦控制輸出脈寬調(diào)制(PWM)信號,經(jīng)整流濾波形成0~10 mA電流,控制溫控閥啟閉,加熱烘房。本機還有高、低限位輸出,輸出繼電器觸點可耐5 A電流,增強了本機的控制功能。
2 硬件電路設計
2.1 溫度測量
由于目前國內(nèi)客車涂裝采用低溫工藝,溫度控制范圍為100℃內(nèi),可使用具有較高測溫精度及測溫范圍的熱電阻PT100作測溫元件。其與溫度的線性關系好、穩(wěn)定性好、可在200℃下長期使用等特點,足以滿足控制要求。
樣機利用較為常見的ICL7135作A/D轉換。熱電阻信號通過三線制聯(lián)接法接入直流不平衡電橋轉換為電壓信號,信號經(jīng)差分放大器放大和濾波處理后,成為與ICL7135轉換器相匹配的電平信號。詳見圖2信號輸入電路圖。
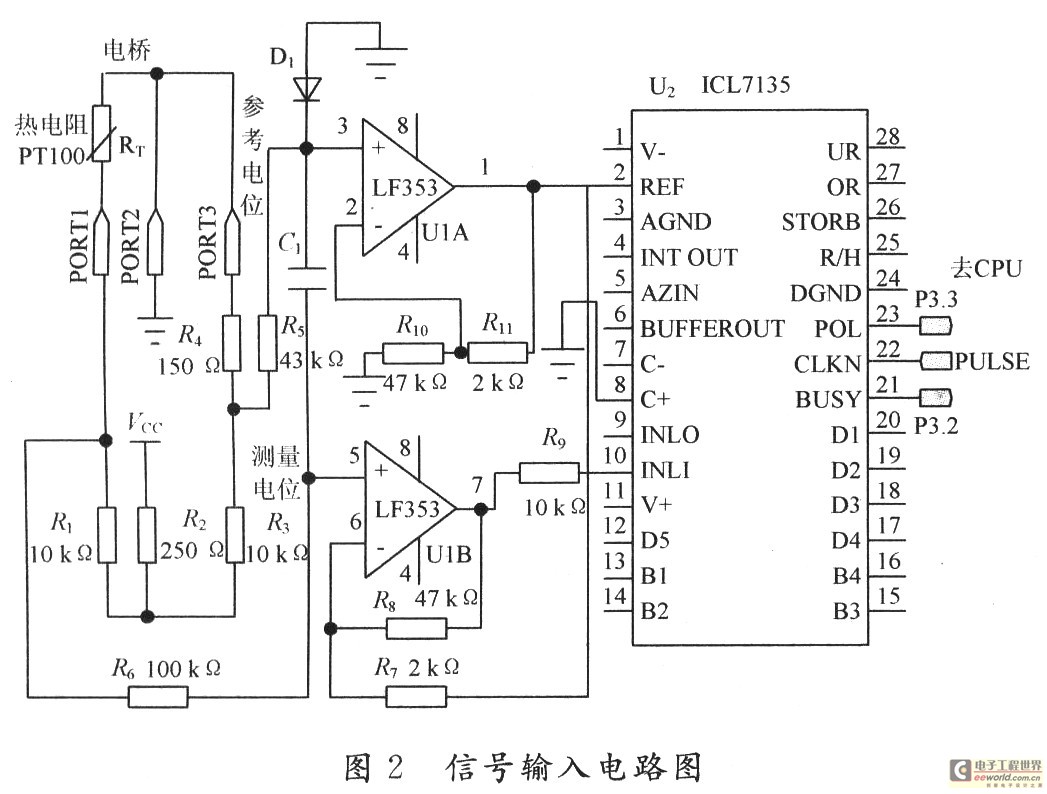
ICL7135是一個較為常見的雙積分型數(shù)字轉換器芯片。為節(jié)約單片機I/O口,本機利用ICL7135的BUSY、POLAR腳,分別與單片機的兩個I/O口相連,BUSY輸出端高電平寬度等于積分與反積分時間之和,ICL7135內(nèi)部規(guī)定積分固定時間為10 001個時鐘脈沖,反積分時間與被測電壓成正比,因此,可通過單片機一個定時器來測量BUSY腳脈寬,減去10 001個時鐘脈沖后,得到與被測參數(shù)成正比的數(shù)值。
本程序設計采用了數(shù)值濾波的方法,通過ICL7135多次轉換后,將最大值、最小值舍棄,余值進行算術平均,保證了測量的準確。
2.2 溫度控制
對加熱溫度的控制是采用模糊積分算法,經(jīng)單片機逆模糊運算,得到輸出值,通過光耦輸出的PWM信號,經(jīng)整流濾波形成0~10 mA的恒流信號,去控制溫控閥的啟閉,調(diào)節(jié)蒸汽,來實現(xiàn)對加熱器加熱,達到理想的溫度控制效果。
2.3 人機接口
本機有4只觸摸式按鍵和8位共陽顯示數(shù)碼管,可通過按鍵對各項控制參數(shù)進行調(diào)整,還可實現(xiàn)自動、手動操作的無擾切換。采用AT93C66的SPI總線E2PROM,可擦寫100萬次,用以保存設定溫度值、報警溫度、溫度誤差和溫差變化率的量化因子,以及輸出功能函數(shù)表、KI積分系數(shù)等,都可通過鍵盤進行調(diào)整,便于生產(chǎn)現(xiàn)場講行人工整定。
3 算法設計與實現(xiàn)
本系統(tǒng)溫度控制中,散熱是自然散發(fā),所以在模糊控制中模糊表的建立應根據(jù)實際加熱器散熱的快慢來決定。
3.1 模糊化
設e為溫度誤差,即實際溫度與給定溫度之間的偏差。本機初始設定范圍為-40~+40℃,劃分為5個變量等級(PB,PS,O,NS,NB),ec為溫度誤差變化率,初始設定范圍為-5~+5℃/min,劃分為4個變量等級(PB,PS,NS,NB),本系統(tǒng)輸入信號e,ec采用梯形隸屬度函數(shù),為獲得速度上的提高,本樣機把輸入范圍內(nèi)的256個數(shù)據(jù)點存儲在ROM中,供模糊運算程序查表,這樣可避免進行數(shù)值計算。本機可通過按鍵調(diào)整溫度誤差、溫度誤差變化率的量化因子,方便進行現(xiàn)場整定。
3.2 模糊推理
根據(jù)操作者手動控制經(jīng)驗,本機采用以下形式制定規(guī)則,形如:“if A and B then C”。可得出20條模糊語句構成的控制規(guī)則。本系統(tǒng)采用了最大最小推理法,運算流程為:對應某個控制規(guī)則,分析條件時,把當前規(guī)則中的,e和ec兩個隸屬度值的大小進行比較,取小值。取小之后的值存放到名為“val”的變量中。條件檢測結束后,開始估計結果,模糊控制函數(shù)通過比較“val”和當前輸出的參考輸出值來得出結果,取大值,作為的輸出值。一旦結果分析完畢,開始一個新的規(guī)則查詢。通過遍歷規(guī)則基數(shù)組進行估計,當遍歷完所有規(guī)則后相應的輸出被保存在相應的數(shù)組中,用來解模糊。
3.3 逆模糊化
對于單片機系統(tǒng),考慮簡化逆模糊處理的數(shù)學過程,解模糊化采用了重心法。溫度輸出控制為U,劃分為5個變量等級(PB,PS,O,NS,NB),輸出U隸屬度函數(shù)采用單點法表示,每個輸出隸屬度函數(shù)用一個字節(jié)的單點值,存放在AT93C66中,以此作為參數(shù),調(diào)整系統(tǒng)的輸出。
3.4 模糊與積分混合控制
由于以上基本模糊控制器只考慮對象的輸出誤差和誤差變化率,相當于非線性PD調(diào)節(jié)器,加上其自身的多級繼電器特性,所以它在本質(zhì)上無法消除穩(wěn)態(tài)余差,且易產(chǎn)生極限環(huán)振蕩。本系統(tǒng)加入了積分環(huán)節(jié)。
考慮本系統(tǒng)控制參數(shù)變化范圍不大,可采用雙模態(tài)分段控制算法進行控制,即當偏差大于某個閾值時用模糊控制,以提高系統(tǒng)阻尼性能,減小響應超調(diào)。偏差在小于某閾值時,引入積分環(huán)節(jié)。一般應在系統(tǒng)進入“穩(wěn)態(tài)”后加入積分器。
積分環(huán)節(jié)的引入,不僅要考慮引入的結構方式,還應該考慮引入的時機,因為常規(guī)積分控制作用有一個很大的缺點,就是積分作用的滯后效應。在偏差向著減小方向變化時,引入積分,對系統(tǒng)的動態(tài)品質(zhì)不利,容易產(chǎn)生小范圍的持續(xù)振蕩和積分飽和現(xiàn)象,這些實質(zhì)上都是由于加入的時機不恰當造成的。針對常規(guī)積分控制作用的上述缺陷及產(chǎn)生的根本原因,應在系統(tǒng)進入“穩(wěn)態(tài)”后加入積分器,可以根據(jù)偏差及偏差變化趨勢來改變積分器的作用,僅當在偏差向著增大方向變化時,積分起作用,抑制偏差繼續(xù)增大,并可改善穩(wěn)定性能。模糊積分引入方式見圖3,是由一常規(guī)積分器與二維模糊控制器相關聯(lián)構成。
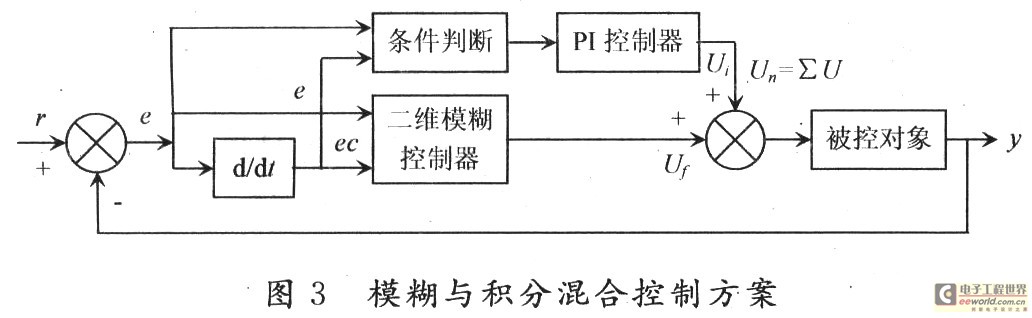
常規(guī)積分控制器輸出Ui=KI∑ei和二維模糊控制器輸出Uf相疊加,作為其總輸出,即:Un=Ui+Uf,因引入了積分環(huán)節(jié),本控制器可消除穩(wěn)態(tài)誤差,消除極限環(huán)震蕩。
4 結 語
本溫度控制系統(tǒng)結構簡單,使用的主要芯片為AT89C55WD,ICL7135,AT93C66,CD4512。軟件實現(xiàn)容易、編程量小、控制精度高、性能穩(wěn)定。由于采用在系統(tǒng)可編程技術的單片機,該系統(tǒng)可在正常工作下進行調(diào)試,只需設定不同的參數(shù),即可應用于不同的工作環(huán)境。該溫控儀樣機在揚州亞星客車烘房做了試驗,結果表明可在一定程度上提高產(chǎn)品的涂裝表面質(zhì)量和生產(chǎn)效率。