
摘 要: 提出一種新的電梯群控系統(tǒng)(EGCS)的評(píng)價(jià)函數(shù),綜合考慮電梯運(yùn)行的評(píng)價(jià)標(biāo)準(zhǔn)并建立了相應(yīng)的模糊規(guī)則。同時(shí)把這些規(guī)則映射到模糊神經(jīng)網(wǎng)絡(luò)中進(jìn)行學(xué)習(xí),提高了調(diào)度的智能性。為保證神經(jīng)網(wǎng)絡(luò)每層權(quán)值的物理意義和改善規(guī)則間的重要性,提出了部分層學(xué)習(xí)算法,并推導(dǎo)了中心值、寬度學(xué)習(xí)算法。最后利用面向?qū)ο蟮姆椒▽?shí)現(xiàn)了電梯群控系統(tǒng)的仿真軟件,結(jié)果表明此調(diào)度策略的優(yōu)越合理性。
關(guān)鍵詞: 電梯群控系統(tǒng) 模糊規(guī)則 模糊神經(jīng)網(wǎng)絡(luò) 調(diào)度
電梯群控系統(tǒng)(EGCS)采用優(yōu)化的控制策略來(lái)協(xié)調(diào)多臺(tái)電梯的運(yùn)行,以提高電梯的運(yùn)輸效率和服務(wù)質(zhì)量。
由于電梯群控系統(tǒng)控制目標(biāo)的多樣性,同時(shí)也由于電梯系統(tǒng)本身所固有的隨機(jī)性和非線性,僅僅通過(guò)傳統(tǒng)的控制方法很難提高控制系統(tǒng)的性能。近年來(lái)智能控制得到迅速發(fā)展,其方法在解決具有此類(lèi)特點(diǎn)的系統(tǒng)上有獨(dú)到之處。自從Mistubishi公司首次把模糊邏輯用于電梯系統(tǒng),采用模糊控制的電梯群控系統(tǒng)數(shù)量迅速增加。例如用模糊逼近的方法來(lái)確定群控系統(tǒng)呼梯分配中的重要參數(shù)——區(qū)域權(quán)重,進(jìn)而得出評(píng)價(jià)函數(shù)的值,實(shí)現(xiàn)系統(tǒng)多目標(biāo)控制[1];利用專(zhuān)家系統(tǒng)來(lái)實(shí)現(xiàn)電梯群控系統(tǒng)的模糊控制[2]等。但這些方法的判斷標(biāo)準(zhǔn)均有不足之處,只考慮了某一類(lèi)因素,并未考慮到乘客的平均等待時(shí)間、能源消耗等因素;同時(shí)在做模糊邏輯推理時(shí)沒(méi)有把時(shí)間量、進(jìn)/出人流量等作為輸入變量。本文提出了新的最優(yōu)評(píng)價(jià)函數(shù),綜合考慮乘客的平均等候時(shí)間(AWT)、長(zhǎng)時(shí)等待率(LWP)、能源消耗(RNC)三個(gè)主要標(biāo)準(zhǔn),并根據(jù)實(shí)際要求給予不同的權(quán)重,以此來(lái)合理分配電梯。AWT、LWP、RNC三個(gè)量可由一定的模糊規(guī)則推理而來(lái),通過(guò)運(yùn)用從經(jīng)驗(yàn)豐富的電梯工程師獲得的各種控制規(guī)則,比僅僅用嚴(yán)格的補(bǔ)償函數(shù)方法,可以獲得更好的效果。但由于單純的模糊控制缺乏學(xué)習(xí)功能,存在系統(tǒng)性能受知識(shí)的影響、調(diào)整確定隸屬函數(shù)需大量的仿真實(shí)驗(yàn)、規(guī)則修改不便等缺點(diǎn)。而人工神經(jīng)網(wǎng)絡(luò)通過(guò)調(diào)整連接權(quán)來(lái)得到近似最優(yōu)的輸入輸出映射,因此適用于建立類(lèi)似電梯群控系統(tǒng)的一類(lèi)非線性動(dòng)態(tài)系統(tǒng)。兩者結(jié)合的模糊神經(jīng)網(wǎng)絡(luò)(FNN),具有一個(gè)表達(dá)框架,一方面提供用于解釋和推理的可理解的模型結(jié)構(gòu),另一方面具有知識(shí)獲取和學(xué)習(xí)能力。本文把AWT、LWP、RNC的規(guī)則映射到神經(jīng)網(wǎng)絡(luò)中,利用網(wǎng)絡(luò)的學(xué)習(xí)功能來(lái)調(diào)整改善規(guī)則,解決了隨機(jī)性、非線性等問(wèn)題。
1 目標(biāo)函數(shù)的選擇
對(duì)于多個(gè)電梯的群控系統(tǒng),所選的控制策略是,每部電梯處理各自的隨機(jī)指令,而對(duì)于層站召喚信號(hào)則由調(diào)度算法進(jìn)行分配。調(diào)度算法實(shí)際上是一個(gè)評(píng)價(jià)函數(shù)。評(píng)價(jià)函數(shù)的確定主要用到以下三個(gè)評(píng)價(jià)標(biāo)準(zhǔn):
· 平均等候時(shí)間(AWT):所有乘客的候梯時(shí)間和乘梯時(shí)間的平均量;
· 長(zhǎng)時(shí)等待率(LWP):在一定時(shí)間內(nèi)等待時(shí)間超過(guò)60s的乘客占總乘客數(shù)的百分比;
· 運(yùn)行量(RNC):在一定時(shí)間內(nèi)電梯的運(yùn)行次數(shù)。由于能源消耗由啟/停電梯決定,所以該標(biāo)準(zhǔn)可決定能源消耗的大小。
其中:Si——評(píng)價(jià)函數(shù),表示第i個(gè)電梯響應(yīng)某個(gè)層站信號(hào)的可信度。i=1...n,n表示群控系統(tǒng)的電梯數(shù)。
三個(gè)評(píng)價(jià)標(biāo)準(zhǔn)可由一定的模糊規(guī)則推理得到。由(1)式可求出各電梯的可信度S1、S2、...Sn。由下面的(2)式可求出最適合響應(yīng)層站召喚信號(hào)的電梯m,它對(duì)應(yīng)著最大的Si。

在(1)式中W的不同選擇表明了對(duì)三個(gè)評(píng)價(jià)標(biāo)準(zhǔn)的不同側(cè)重。例如在上/下班高峰,選擇電梯時(shí)以減小乘客等待時(shí)間為主要考慮因素而節(jié)約能源為輔,故LWP所對(duì)應(yīng)的權(quán)重大一些;而在晚上乘客稀少,則以節(jié)約能源為主,故RNC所對(duì)應(yīng)權(quán)重可大一些,而LWP所對(duì)應(yīng)的權(quán)重則小一些。
2 規(guī)則的知識(shí)表示及推理
2.1 模糊規(guī)則的知識(shí)表示
在電梯群控系統(tǒng)中運(yùn)用從經(jīng)驗(yàn)豐富的電梯工程師獲得的各種控制規(guī)則,比僅僅用嚴(yán)格的補(bǔ)償函數(shù)方法,可獲得更好的效果,它可很好地處理系統(tǒng)中的多樣性、隨機(jī)性和非線性。
層站召喚分配部分把新的層站召喚信號(hào)分配給合適的電梯,在分配時(shí)要考慮召喚方向和所在樓層、電梯狀態(tài)以及未來(lái)層站召喚等信息。AWTi、LWPi和RNCi的模糊估計(jì)需用到HCWTi、maxHCWTi、CVi和GDi,分別定義如下:
HCWTi—層站召喚信號(hào)從產(chǎn)生到被第i個(gè)電梯響應(yīng)的等待時(shí)間。
maxHCWTi—分配給第i個(gè)電梯的所有層站召喚信號(hào)的最大HCWTi。
CVi—第i個(gè)電梯響應(yīng)未來(lái)層站召喚信號(hào)的能力,與乘客的進(jìn)出電梯流量有關(guān)。
GDi—新的層站召喚信號(hào)的產(chǎn)生位置與被第i個(gè)電梯響應(yīng)的所有召喚信號(hào)(包括層站召喚和梯內(nèi)召喚)產(chǎn)生位置之間的最短距離。
CVi說(shuō)明如下:

其中的in_person表示在將來(lái)單位時(shí)間內(nèi)試圖進(jìn)入電梯i的乘客,fail_person表示在單位時(shí)間內(nèi)層站召喚信號(hào)沒(méi)被響應(yīng)的乘客。可看出CVi越大,響應(yīng)將來(lái)層站召喚信號(hào)的能力越強(qiáng)。
HCWTi越小,說(shuō)明層站召喚信號(hào)被響應(yīng)的時(shí)間越短,則乘客的候梯時(shí)間小。但因電梯i的啟/停頻度增加,梯內(nèi)乘客的乘梯時(shí)間相應(yīng)地變長(zhǎng),結(jié)果所有乘客的平均等待時(shí)間AWTi一般會(huì)增加。
我們把文獻(xiàn)中的共性知識(shí)和具有豐富實(shí)踐經(jīng)驗(yàn)的電梯專(zhuān)家的個(gè)性知識(shí)加以總結(jié),仔細(xì)推敲,歸納了如表1的AWTi、LWPi和RNCi模糊規(guī)則,用IF-THEN語(yǔ)句來(lái)表示。其中輸入變量均為模糊化后的值。

變量的隸屬度函數(shù)取為高斯型,隸屬度函數(shù)的中心值a、寬度b要根據(jù)實(shí)際需要適當(dāng)調(diào)整,以滿足減小AWT、LWP、RNC的多項(xiàng)要求。
2.2模糊神經(jīng)網(wǎng)絡(luò)的知識(shí)存貯及推理
根據(jù)前面的模糊規(guī)則表,可把這些模糊規(guī)則映射到模糊神經(jīng)網(wǎng)絡(luò)(FNN)中,從而提高推理的智能性。該網(wǎng)絡(luò)提供了解釋和推理的可理解的模型結(jié)構(gòu),通過(guò)它可以以一種清晰的方式描述知識(shí),模糊規(guī)則可用網(wǎng)絡(luò)的節(jié)點(diǎn)對(duì)象、連接權(quán)對(duì)象、連接結(jié)構(gòu)等來(lái)翻譯解釋?zhuān)煌瑫r(shí)具有知識(shí)獲取和學(xué)習(xí)能力。與上述規(guī)則表相對(duì)應(yīng)的模糊神經(jīng)網(wǎng)絡(luò)分別如圖1(a)、(b)、(c)所示。
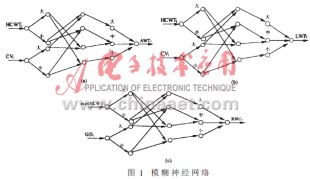
由于該網(wǎng)可通過(guò)知識(shí)的表達(dá)和學(xué)習(xí),記憶交通信息,然后用推理方式推出AWT、LWP、RNC三個(gè)量,所以是一種智能推理。考慮到輸入?yún)?shù)的模糊化和輸出參數(shù)的去模糊化,該模型總共有5層。其中第1層為輸入層,輸入?yún)⒘繛闃?biāo)準(zhǔn)化后的量,在(0,1)之間;第2層為模糊化層,對(duì)輸入值分別模糊化為大、中、小三種語(yǔ)言變量;第三層是規(guī)則層,其神經(jīng)元個(gè)數(shù)由專(zhuān)家知識(shí)確定的規(guī)則個(gè)數(shù)決定,該層與第2層的連接完成模糊規(guī)則前提條件的匹配,實(shí)現(xiàn)“模糊邏輯與”的運(yùn)算;第4層為結(jié)論節(jié)點(diǎn)層,將具有相同結(jié)論又被激活的規(guī)則節(jié)點(diǎn)的輸出放在一起實(shí)現(xiàn)“求和”運(yùn)算,得到輸出隸屬度函數(shù)值;第5層為輸出層完成去模糊化。各層節(jié)點(diǎn)的輸入函數(shù)和輸出函數(shù)可選取如下:
其中S、X 分別表示輸入、輸出函數(shù),W為權(quán)值,Ni表示第i層的節(jié)點(diǎn)數(shù)。根據(jù)(4)~(8)式及網(wǎng)絡(luò)結(jié)構(gòu)圖即可分別推理出第i個(gè)電梯的AWT、LWP和RNC,并帶入(1)式求得第i個(gè)電梯響應(yīng)層站召喚信號(hào)的可信度,(1)式中W的選擇根據(jù)交通模式的不同給予不同的權(quán)重。以此類(lèi)推,分別求出其它電梯響應(yīng)該信號(hào)的可信度,并根據(jù)(2)式求出最大可信度從而選擇最合適的電梯調(diào)度。
3 規(guī)則的改善
3.1 中心值與寬度的修改
網(wǎng)絡(luò)中各節(jié)點(diǎn)及所有參數(shù)均有明顯的物理意義,其初值可根據(jù)模糊規(guī)則來(lái)確定。鑒于電梯群控系統(tǒng)的復(fù)雜性和一些因素的不確定性,可通過(guò)網(wǎng)絡(luò)的學(xué)習(xí)不斷修改和完善規(guī)則,提高調(diào)度的準(zhǔn)確性。學(xué)習(xí)一般采用BP算法,如每層的權(quán)值均作修改,可以稱(chēng)為全部層學(xué)習(xí),其缺點(diǎn)是計(jì)算量大。對(duì)于模糊規(guī)則,中心值、寬度應(yīng)選擇恰當(dāng)以滿足減小AWT、LWP、RNC的要求。針對(duì)模糊神經(jīng)網(wǎng)絡(luò)的隸屬度函數(shù),給出了中心值、寬度學(xué)習(xí)算法。修正的學(xué)習(xí)參數(shù)采用了動(dòng)量項(xiàng)方法,它實(shí)際上相當(dāng)于阻尼項(xiàng),有利于減小學(xué)習(xí)過(guò)程的振蕩,改善收斂性[3]。對(duì)于圖1的模糊神經(jīng)網(wǎng)絡(luò),第二層為模糊化層,輸入隸屬度函數(shù)有中心值、寬度兩個(gè)參數(shù),它們是模糊化的關(guān)鍵。在學(xué)習(xí)樣本已知的情況下,可只對(duì)網(wǎng)絡(luò)的中心值、寬度進(jìn)行學(xué)習(xí),同樣可減少學(xué)習(xí)時(shí)間和計(jì)算量。其算法如下:

i=1…N2,N2為第2層的節(jié)點(diǎn)個(gè)數(shù),N3為第3層的節(jié)點(diǎn)個(gè)數(shù);δpi(2)為在第p個(gè)樣本下反傳到第2層的誤差;xpi(2)為在第p個(gè)樣本下第2層第i個(gè)節(jié)點(diǎn)(神經(jīng)元)的輸出函數(shù);spi(2)為在第p個(gè)樣本下第2層第i個(gè)節(jié)點(diǎn)的輸入函數(shù);mpi(2)為第2層第i個(gè)節(jié)點(diǎn)的隸屬度函數(shù)中心值;σpi(2)為第2層第i個(gè)節(jié)點(diǎn)的隸屬度函數(shù)寬度。
(2)寬度修改的推導(dǎo)同前,有:

3.2 部分層修改
對(duì)于FNN,某一層的權(quán)值根據(jù)實(shí)際物理意義可能為一確定值,即使交通信息的訓(xùn)練樣本變化也不希望對(duì)該層權(quán)值進(jìn)行修正,若啟動(dòng)全部層學(xué)習(xí)將使該層權(quán)值改變,失去了實(shí)際的物理意義,并有可能使學(xué)習(xí)不收劍,發(fā)生振蕩。為此利用部分層學(xué)習(xí),此算法可根據(jù)實(shí)際的需要對(duì)網(wǎng)絡(luò)的某一層或某幾層進(jìn)行學(xué)習(xí)。仍采用誤差反傳的原則,當(dāng)前饋到某一層時(shí),如該層需要學(xué)習(xí),則對(duì)該層的權(quán)值進(jìn)行修改。否則,不需要修改,但該層的誤差需通過(guò)網(wǎng)絡(luò)的內(nèi)部連接傳到上一層。該算法可節(jié)省學(xué)習(xí)時(shí)間,減少計(jì)算量。對(duì)圖1的網(wǎng)絡(luò),一般第四層的權(quán)值是學(xué)習(xí)的主要參數(shù),為此可只對(duì)該層權(quán)值進(jìn)行學(xué)習(xí)。修正該層權(quán)值的目的是改善交通規(guī)則間的相對(duì)重要性,使重要規(guī)則的作用得以加強(qiáng),提高電梯調(diào)度的智能性。
3.3電梯的調(diào)度
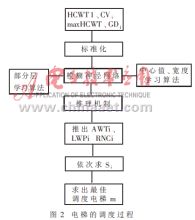
根據(jù)以上介紹,總結(jié)電梯調(diào)度過(guò)程如圖2,此種電梯調(diào)度方法很好的解決了層站召喚信號(hào)的隨機(jī)性、不確定性給電梯調(diào)度所帶來(lái)的問(wèn)題。而隸屬度函數(shù)和規(guī)則的修改使神經(jīng)網(wǎng)絡(luò)模型能適應(yīng)變化著的交通狀況,有利于提高調(diào)度的智能性。
4 仿真結(jié)果
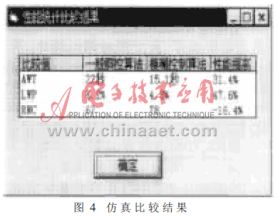
根據(jù)以上的交通模式判別策略和調(diào)度算法,我們用VB編制了電梯仿真軟件系統(tǒng)[4][5][6],該系統(tǒng)具有電梯參數(shù)設(shè)置、仿真、性能統(tǒng)計(jì)、交通模式判別、系統(tǒng)幫助等功能。考慮到系統(tǒng)的開(kāi)放性、可擴(kuò)充性、柔性等特點(diǎn),采用了面向?qū)ο蟮姆治龊驮O(shè)計(jì)方法。在群控系統(tǒng)中每個(gè)電梯均可看成一個(gè)對(duì)象,對(duì)象之間通過(guò)消息進(jìn)行通訊。采用本文所介紹的調(diào)度策略進(jìn)行了仿真實(shí)驗(yàn),仿真條件如圖3,仿真比較結(jié)果如圖4。結(jié)果表明AWT、LWP性能均提高,而RNC性能則降低。這是因?yàn)樵诖朔抡鏁r(shí)段對(duì)能源消耗的重要性要求降低所致,反映在仿真條件上是RNC對(duì)應(yīng)的權(quán)重相比其它兩項(xiàng)較小。
 ?
? 
參考文獻(xiàn)
1 Chang Bum Kim, Kyoung A.seong, etc, ″A fuzzy approach to elevator group control system″,IEEE Trans Syst., Man, Cybern.,1995;25(b):985~990
2 Seiji, etc, ″Supervisory control for elevator group by using fuzzy expert system″, Proceedings of the IEEE International Conference on Industrial Technology, Guangzhou, 1994
3 孫增忻等,智能控制理論和應(yīng)用,南寧:廣西科學(xué)技術(shù)出版社,1996
4 Edward Yourdon&Carl Argila, Case studies in object oriented analysis & design, Publishing house of elec-tronics industry, 1998.6
5 Ronald J.Norman, Objected-oriented systems analysis and design, Prentice-h(huán)all international, inc., 1998.6
6 彭克松等譯,電梯交通分析與控制,北京:中國(guó)建筑科學(xué)研究院機(jī)械化研究所,1993