
摘要:文中以80C51的體系結(jié)構(gòu)和指令系統(tǒng)為基礎(chǔ),設(shè)計(jì)并實(shí)現(xiàn)了虛擬80C51指令執(zhí)行系統(tǒng),包括虛擬指令執(zhí)行器和虛擬存儲(chǔ)器。這種設(shè)計(jì)方法適用于存儲(chǔ)空間和指令規(guī)模與80C51相似的單片機(jī)指令系統(tǒng),也可根據(jù)需要,增加對(duì)80C51單片機(jī)的虛擬范圍。
關(guān)鍵字:80C51;虛擬;指令系統(tǒng)
0 引言
在進(jìn)行嵌入式系統(tǒng)開發(fā)時(shí),通常是在宿主機(jī)上通過交叉編譯方式生成目標(biāo)機(jī)平臺(tái)的二進(jìn)制代碼,然后將其寫入目標(biāo)機(jī)中運(yùn)行,這種開發(fā)方法的一個(gè)缺點(diǎn)是不易調(diào)試生成的目標(biāo)代碼邏輯,因此,目前許多交叉編譯工具都具有在宿主機(jī)上調(diào)試源代碼的功能。要讓目標(biāo)機(jī)平臺(tái)的二進(jìn)制代碼能夠在宿主機(jī)上運(yùn)行,必須提供一個(gè)虛擬的能夠執(zhí)行目標(biāo)機(jī)指令的系統(tǒng)。本文以80C51單片機(jī)為目標(biāo)機(jī),基于X86平臺(tái)的PC機(jī)為宿主機(jī),給出了一種在宿主機(jī)上構(gòu)造虛擬目標(biāo)機(jī)指令執(zhí)行系統(tǒng)的方法。
1 虛擬指令執(zhí)行系統(tǒng)簡介
本文所述的80C51虛擬指令執(zhí)行系統(tǒng)是指用軟件來模擬80C51指令的執(zhí)行過程和執(zhí)行效果,它主要由虛擬指令執(zhí)行器和虛擬存儲(chǔ)器組成。虛擬指令執(zhí)行器是虛擬指令執(zhí)行系統(tǒng)的核心模塊,它將指令的執(zhí)行過程分為取指令、分析指令和執(zhí)行指令三個(gè)階段,模擬這三個(gè)階段的操作并虛擬出指令的執(zhí)行效果。虛擬存儲(chǔ)系統(tǒng)是虛擬指令執(zhí)行系統(tǒng)必不可少的模塊,它反映著虛擬指令執(zhí)行器執(zhí)行指令的效果,本文以80C51體系中存儲(chǔ)器的結(jié)構(gòu)為依據(jù),虛擬出存儲(chǔ)器空間和寄存器,并提供了虛擬指令執(zhí)行器訪問虛擬存儲(chǔ)器的接口。
圖1是虛擬80C51指令執(zhí)行系統(tǒng)的總體結(jié)構(gòu)圖,同時(shí)圖1也顯示了系統(tǒng)運(yùn)行的三個(gè)基本過程:
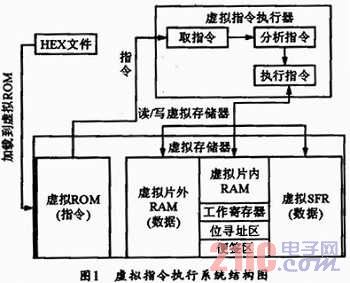
(1)加載二進(jìn)制文件到虛擬存儲(chǔ)器的ROM中
(2)虛擬指令執(zhí)行器周期性地從虛擬存儲(chǔ)器的ROM中取指令、分析指令并且執(zhí)行指令
(3)指令在執(zhí)行過程中通過讀寫虛擬存儲(chǔ)器中的內(nèi)存和寄存器來反映指令執(zhí)行效果
顯然,上述過程是圍繞著虛擬指令執(zhí)行器和虛擬存儲(chǔ)器進(jìn)行的。
2 虛擬存儲(chǔ)器的設(shè)計(jì)與實(shí)現(xiàn)
加載過程和虛擬指令執(zhí)行器都依賴于虛擬存儲(chǔ)器,因此先介紹虛擬存儲(chǔ)器的實(shí)現(xiàn)是必要的。從訪問的角度分析,寄存器和存儲(chǔ)器具有同樣的屬性,可以使用類似的實(shí)現(xiàn)方法虛擬它們。本文虛擬存儲(chǔ)器的范圍包括虛擬的存儲(chǔ)空間和寄存器。
2.1 虛擬80C51存儲(chǔ)空間
80C51的存儲(chǔ)空間除了有ROM和RAM之分,還有片內(nèi)和片外之分。80C51指令在執(zhí)行的時(shí)候訪問的數(shù)據(jù)可以存在于以下四種類型的存儲(chǔ)單元中:片內(nèi)ROM,片外ROM,片內(nèi)RAM,片外RAM,它們的地址空間見表1。
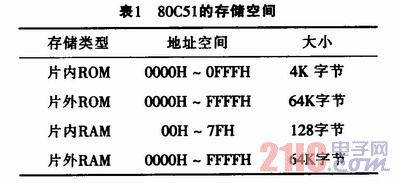
各個(gè)存儲(chǔ)空間的容量都較小,可以通過開辟相應(yīng)大小的不同數(shù)組來虛擬存儲(chǔ)空間:
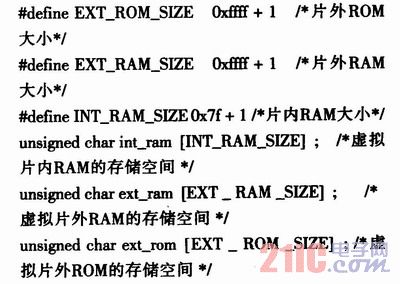
虛擬存儲(chǔ)器除了要虛擬出存儲(chǔ)空間,還要提供訪問的接口:讀存儲(chǔ)單元和寫存儲(chǔ)單元。在讀寫存儲(chǔ)單元時(shí)需要指出存儲(chǔ)單元的類型。
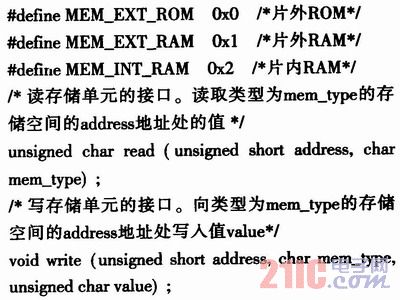
使用這兩個(gè)接口,虛擬指令執(zhí)行器在執(zhí)行指令時(shí)可以方便地訪問虛擬存儲(chǔ)器。
2.2 虛擬80C51寄存器
80C51的寄存器可以分為三類:特殊寄存器(SFR),工作寄存器(R0~R7),程序計(jì)數(shù)器(PC),虛擬系統(tǒng)對(duì)這三種寄存器有不同的虛擬方式和訪問方式。
1)特殊寄存器的虛擬和訪問
80C51的特殊寄存器的地址空間范圍是0x80~0xFF,每一個(gè)特殊寄存器在這個(gè)地址空間中有一個(gè)確定的地址,從虛擬角度可以認(rèn)為特殊寄存器和RAM具有類似的訪問特點(diǎn),因此可以使用虛擬存儲(chǔ)器的方法來虛擬特殊寄存器:
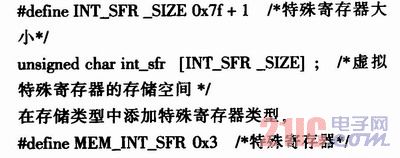
這樣,可以使用虛擬存儲(chǔ)器提供的讀寫接口來訪問特殊寄存器。
2)工作寄存器的虛擬和訪問
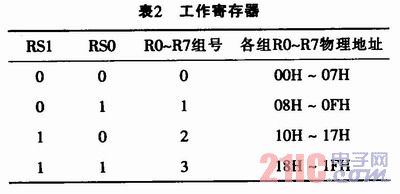
不同于特殊寄存器,工作寄存器R0~R7的地址在指令執(zhí)行過程是不確定的。它們的地址由特殊寄存器PSW中的RS1位和RS0位的值決定,其物理地址占用片內(nèi)RAM的地址空間,見表2。圖2給出了訪問工作寄存器Rn的流程。

3)PC寄存器的虛擬和訪問
80C51的程序計(jì)數(shù)器PC是一個(gè)16位寄存器,在指令執(zhí)行過程中被CPU改變。PC寄存器對(duì)用戶是透明的,也即PC寄存器沒有映射到存儲(chǔ)器的地址空間中,不能借助虛擬存儲(chǔ)器的讀寫接口來訪問PC,需要單獨(dú)虛擬一個(gè)16位的PC寄存器,并且提供讀寫的接口:
3 虛擬指令執(zhí)行器的設(shè)計(jì)與實(shí)現(xiàn)
一般地,CPU總是不停的取指令、分析指令、執(zhí)行指令,虛擬指令執(zhí)行器執(zhí)行同樣的過程,它以模擬上述三個(gè)階段的操作為核心,并模擬出80C51指令系統(tǒng)中每條指令的執(zhí)行效果。圖4給出了虛擬指令執(zhí)行器的總體設(shè)計(jì)。
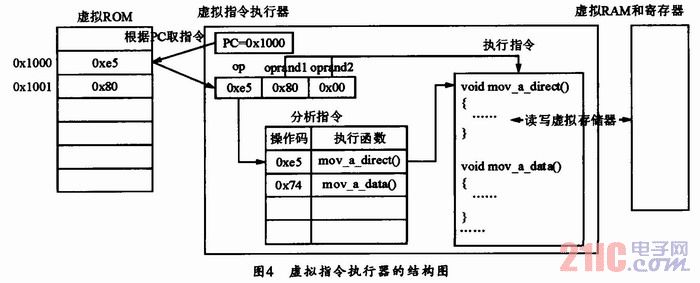
可以看出,虛擬指令執(zhí)行器的工作流程分為三個(gè)階段:取指令階段、分析指令階段和執(zhí)行指令階段。
3.1 取指令階段
虛擬的指令執(zhí)行系統(tǒng)每一周期根據(jù)PC的值從虛擬的ROM中取將要執(zhí)行的指令。在虛擬指令執(zhí)行器執(zhí)行指令之前,必須將硬盤上的二進(jìn)制文件(hex文件格式)加載到虛擬的ROM中,作為指令執(zhí)行器的輸入。裝載的過程按照如下描述完成:解析二進(jìn)制文件的內(nèi)容,將指令存放在指定的ROM地址處。加載完成后還需要將PC寄存器的值設(shè)置為第一條要執(zhí)行的指令的地址。
虛擬的指令執(zhí)行系統(tǒng)每次取的指令長度是不確定的。80C51的指令長度不是固定的,分為單字節(jié)、雙字節(jié)和三字節(jié)指令三種,因此取一條指令時(shí)需要確定該條指令的長度。通過分析80C51的指令表可以得到,任何一條指令第一個(gè)字節(jié)都是唯一的。利用這個(gè)特點(diǎn),可以建一個(gè)該字節(jié)到指令長度的映射表。取指令時(shí),先從PC所指地址處取第一個(gè)字節(jié),然后通過查詢映射表再取相應(yīng)的字節(jié)數(shù)。取指成功后需要更新PC值,使PC就指向下條指令的地址。
為了后續(xù)兩個(gè)階段的使用,需要將取到的指令存放在一個(gè)緩沖區(qū)中。80C51的最長指令為3個(gè)字節(jié),因此可以使用一個(gè)3個(gè)字節(jié)長度的數(shù)組存放取到的指令,比如unsigned char inst,將取到的指令按順序填充到inst中。
3.2 分析指令階段
一條指令包括操作碼和操作數(shù),操作碼決定該條指令對(duì)操作數(shù)執(zhí)行什么樣的動(dòng)作。分析指令階段需要從取到的指令中解析出操作碼和操作數(shù)。解析的過程為,假設(shè)指令已經(jīng)取到inst中,從虛擬指令執(zhí)行器的角度可以認(rèn)為指令的第一個(gè)字節(jié)為操作碼,即inst[0],操作數(shù)分別存在inst[1]和inst[2]中,根據(jù)操作碼到指令長度的映射表確定操作數(shù)的個(gè)數(shù)。
解析出指令碼和操作數(shù)后,就需要根據(jù)操作碼來調(diào)用該指令對(duì)應(yīng)的執(zhí)行函數(shù)。每條指令都有自己的執(zhí)行動(dòng)作,可以為每條指令設(shè)計(jì)一個(gè)執(zhí)行函數(shù)來模擬該指令的執(zhí)行動(dòng)作。指令操作碼和指令執(zhí)行函數(shù)也是一一對(duì)應(yīng)的,所以虛擬系統(tǒng)中會(huì)有指令操作碼到指令執(zhí)行函數(shù)的映射表,當(dāng)分析出指令的操作碼后,就能快速地調(diào)用該指令的執(zhí)行函數(shù)來模擬該指令的語義動(dòng)作。比如,取到的指令為e580,按照前面所述,0xe5為操作碼,存放在inst[0]中,0x80為操作數(shù),存放在inst[1]中,通查指令表可知0xe5對(duì)應(yīng)的匯編指令為MOV A,direct,為這條指令設(shè)計(jì)一個(gè)執(zhí)行函數(shù)mov_a_direct0,虛擬的指令執(zhí)行系統(tǒng)在執(zhí)行指令e580時(shí),實(shí)際上就是調(diào)用其執(zhí)行函數(shù)mov_a_direct 0。
3.3 執(zhí)行指令階段
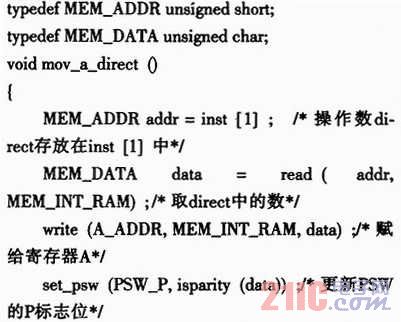
指令的執(zhí)行動(dòng)作是通過調(diào)用指令的執(zhí)行函數(shù)來完成的。指令的執(zhí)行函數(shù)是對(duì)該條指令的實(shí)際執(zhí)行動(dòng)作的模擬,主要包括對(duì)寄存器、內(nèi)存的訪問,以及對(duì)程序狀態(tài)字中標(biāo)志位的影響等。比如上面介紹的操作碼為0xe5的指令,該指令對(duì)應(yīng)的匯編指令為MOV A,direct,其意義為將direct中的內(nèi)存數(shù)存放在寄存器A中,并且改變PSW中的P標(biāo)志位,該指令的執(zhí)行函數(shù)mov_a_direct 0實(shí)際上就是對(duì)上面描述的實(shí)現(xiàn)。
![]()
80C51指令系統(tǒng)共有111條指令,虛擬指令執(zhí)行器為每條指令都設(shè)計(jì)一個(gè)類似的執(zhí)行函數(shù)。這些指令可以分為幾類:數(shù)據(jù)傳送指令、算術(shù)運(yùn)算指令、邏輯運(yùn)算和移位指令、控制轉(zhuǎn)移指令和位操作指令。在設(shè)計(jì)執(zhí)行函數(shù)時(shí)有一些需要注意的地方:算術(shù)運(yùn)算指令需要注意運(yùn)算對(duì)PSW的標(biāo)志位的影響,控制轉(zhuǎn)移指令需要精確改變PC寄存器的值等。
4 結(jié)束語
本文詳細(xì)介紹了虛擬80C51指令執(zhí)行系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn),文章給出的方法也適用于存儲(chǔ)空間和指令規(guī)模與80C51相似的單片機(jī)指令系統(tǒng)。虛擬指令執(zhí)行系統(tǒng)是虛擬目標(biāo)機(jī)其他功能的基礎(chǔ),有廣泛的應(yīng)用,比如可以構(gòu)造出基于虛擬指令執(zhí)行系統(tǒng)的目標(biāo)機(jī)代碼調(diào)試器等。另外根據(jù)應(yīng)用需要.也可增加對(duì)80C51單片機(jī)的虛擬范圍,比如實(shí)現(xiàn)對(duì)中斷和I/O等的虛擬。