
引言
目前國內(nèi)使用的數(shù)控系統(tǒng)通常是在通用計算機或工控機的基礎(chǔ)上加裝運動控制卡,使用Windows操作系統(tǒng),并安裝昂貴的數(shù)控軟件構(gòu)成的。這樣的系統(tǒng)軟件成本高、硬件資源浪費、功耗大。而嵌入式產(chǎn)品具有系統(tǒng)結(jié)構(gòu)精簡、功耗低等特點,能彌補傳統(tǒng)數(shù)控系統(tǒng)的不足。免費軟件Linux 操作系統(tǒng)進軍嵌入式領(lǐng)域,更使得嵌入式產(chǎn)品能夠充分發(fā)揮廉價、高性價比的優(yōu)勢。
本文所述的正是以Linux操作系統(tǒng)為軟件平臺,以ARM9微處理器為硬件平臺,以數(shù)控銑床為背景,自主研發(fā)數(shù)控硬件及軟件的嵌入式數(shù)控銑床控制系統(tǒng)。
1 系統(tǒng)硬件組成
系統(tǒng)的硬件由ARM系統(tǒng)主板和擴展板卡組成。
硬件結(jié)構(gòu)如圖1。
ARM9的數(shù)控銑床系統(tǒng)設(shè)計方案" src="http://files.chinaaet.com/images/20110707/d52394b6-7d52-4716-967c-2ab72571e9e5.jpg" />
1.1 ARM系統(tǒng)主板
根據(jù)系統(tǒng)需要,主板上主要包括中央處理器S3C2410X、SDRAM 內(nèi)存、NAND FLASH (64M )、串口、CS8900A以太網(wǎng)芯片(10M 網(wǎng)口)、LCD顯示器接口、USB接口、擴展總線接口等。
中央處理器S3C2410X內(nèi)部資源十分豐富,包括1個LCD控制器、SDRAM控制器、3個通道的UART、4個具有PWM功能的計時器和1個內(nèi)部時鐘、2個USB主機接口和1個USB設(shè)備接口等。S3C2410X處理器主頻最高為202MHz,內(nèi)置16KB指令高速緩存和16KB數(shù)據(jù)高速緩存,5級指令流水線,帶有乘累加運單元,可以運行起嵌入式Linux操作系統(tǒng)并能進行較為復(fù)雜的信息處理,基本滿足用戶對快速性的要求。并且采用NAND FLASH與SDRAM組合來存儲數(shù)據(jù)和程序,可以獲得非常高的性價比
系統(tǒng)采用10M的以太網(wǎng)接口芯片CS8900A,這是用于嵌入式設(shè)備的低成本以太局域網(wǎng)控制器。通過標準網(wǎng)絡(luò)接口數(shù)控系統(tǒng)可以連接到Internet或局域網(wǎng)上。
1.2 擴展板卡
擴展板卡即把步進電機驅(qū)動器控制接口、伺服電機驅(qū)動器控制接口、編碼器接口集成在一個板子上,作為控制數(shù)控銑床的控制卡,來控制步進電機和伺服電機的運轉(zhuǎn)。
機床目前設(shè)計為3軸聯(lián)動,為未來能擴展為5軸,設(shè)計留有5組接線端子。每組需要兩個接線端子與驅(qū)動器相連(采用單脈沖方式),其中一個端子通過導(dǎo)線連接步進電機驅(qū)動器的CP,提供給步進電機脈沖信號,控制它轉(zhuǎn)動,另一個接驅(qū)動器的CW,控制電機的轉(zhuǎn)動方向,使電機可以完成正轉(zhuǎn)、反轉(zhuǎn)和停止動作。對電機的速度控制是通過軟件控制脈沖的輸出頻率實現(xiàn)的。經(jīng)比較決定選擇三相混合式步進電機驅(qū)動器BD3SFB。因BD3SFB驅(qū)動器可兼容兩相、四相和五相的工作方式,且有更高的定位精度,可控制電機在任意細分步數(shù)情況下,如6000步/轉(zhuǎn)時精確定位。電機和驅(qū)動器間僅用3根線連接,與交流異步電機一樣,減少連線出錯的可能性。
伺服電機的控制與反饋由驅(qū)動器完成,數(shù)控系統(tǒng)只需將指令信號發(fā)送至驅(qū)動器中。由處理器的通用I/O口產(chǎn)生伺服電機的脈沖信號和方向信號。伺服驅(qū)動器一般需要差分信號作為輸入,故采用26LS31芯片作為其輸出驅(qū)動電路,經(jīng)過光耦的隔離直接連接到伺服電機驅(qū)動器上。
對步進電機采用開環(huán)控制,但為了將銑刀具體位置呈現(xiàn)給用戶,同時修正控制及運動部分不可預(yù)見的誤差,可以在步進電機上安裝編碼器。通過聯(lián)軸器將二者相連。編碼器脈沖信號經(jīng)8253計數(shù)后可得到被測量的數(shù)字信號,然后經(jīng)地址鎖存器連接到擴展總線,由處理器進行處理。8253復(fù)用8位數(shù)據(jù)總線表示計數(shù)值,處理器先讀低8位后讀高8位,計數(shù)范圍是0~65535。同時,鑒向器占用數(shù)據(jù)總線3位表示各電機旋轉(zhuǎn)方向。在單脈沖模式下,編碼器脈沖由D觸發(fā)器CD4013鑒相,處理器通過判斷高低電平得知電機旋轉(zhuǎn)方向。為了抗干擾和實現(xiàn)電氣隔離,在與步進電機驅(qū)動器的脈沖信號和方向信號的端口連接時采用了光電隔離器件。D觸發(fā)器鑒相如圖2。

2 系統(tǒng)軟件設(shè)計
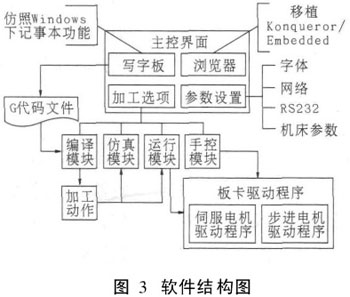
傳統(tǒng)數(shù)控系統(tǒng)的使用流程是先由用戶編輯G代碼或其它格式的加工文件,數(shù)控系統(tǒng)根據(jù)該文件中代碼的意義,控制刀具做出相應(yīng)的動作。所以在軟件方面,系統(tǒng)需要提供文本編輯功能、對加工文件的編譯功能、電機驅(qū)動功能等。為了使用戶驗證加工程序的正誤,系統(tǒng)還要提供仿真功能,將走刀過程展現(xiàn)給用戶。
為了實現(xiàn)網(wǎng)絡(luò)功能,本系統(tǒng)還移植了嵌入式瀏覽器Konqueror/Embedded,這是一款自由軟件。由于瀏覽器可以訪問HTTP、FTP、SMTP、NNTP等多種不同協(xié)議的服務(wù),故安裝瀏覽器可謂一舉多得,移植過程參考文獻。軟件結(jié)構(gòu)如圖3所示。
2.1 操作系統(tǒng)平臺的搭建
2.2 伺服電機和步進電機驅(qū)動程序
伺服電機需要的信號是PWM波形控制信號,因此伺服電機驅(qū)動程序主要是實現(xiàn)脈寬調(diào)制。這個脈寬調(diào)制是利用一個定時器,并根據(jù)由SPWM算法得到的延遲時間,控制一個通用I/O端口高低電平持續(xù)時間得到的。系統(tǒng)產(chǎn)生的PWM波形如下圖4所示。
而在三個步進電機的設(shè)備驅(qū)動程序中,向步進電機發(fā)送連續(xù)信號定義為寫操作;從8253中讀數(shù)據(jù)定義為讀操作;由鍵盤控制各電機動作作為自定義操作。
2.3 G代碼編譯
G代碼是國際通用的機床加工代碼,其編譯的思想是:首先將G代碼文件讀入流中,逐行分析其意義,并且?guī)в胁殄e功能。當(dāng)遇到子程序跳轉(zhuǎn)時記錄文件指示出其位置和循環(huán)次數(shù)時,子程序返回后從記錄位置繼續(xù)執(zhí)行;遇到主軸旋轉(zhuǎn)時,在編譯文件中寫入旋轉(zhuǎn)標志和PWM 的脈寬;遇到插補命令時寫入脈沖標志和每步的三坐標脈沖信號諸如此類。最后生成記錄整套加工步驟的二進制文件。編譯流程如圖5所示。

2.4 插補算法與刀補算法
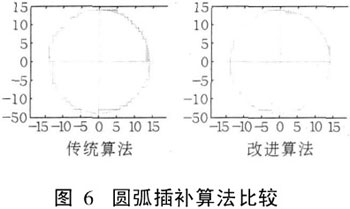
數(shù)控銑床控制系統(tǒng)使用逐點比較法實現(xiàn)直線和圓弧插補算法。以刀的當(dāng)前位置為起點,以G代碼給定位置為終點,在其間的直線或圓弧上插入擬合點,根據(jù)這些點產(chǎn)生一系列三坐標脈沖信號。逐點比較法的缺陷是圓弧插補只能走x 或y方向的正交線,而缺失了最應(yīng)該在圓弧插補中出現(xiàn)的由x、y方向合成的±45/135°斜線,系統(tǒng)根據(jù)圓弧相對于x 或y軸的傾向性,使插補過程中在圓弧的±45/135°附近盡量使用斜線,使得插補精度更高、步數(shù)更少。圖6是由Matlab仿真得到的改進算法和傳統(tǒng)算法的比較,如果定義理想曲線和擬和曲線的誤差為兩曲線相夾的面積(圖中灰色部分),可看出改進算法的誤差較小。
編寫加工程序時,一般只考慮刀具中心沿零件輪廓切削,而忽略刀具半徑對加工的影響,在實際加工時需要在刀具中心與刀具切削點之間進行位置偏置,補償上述影響。這種變換過程即為刀具補償。系統(tǒng)采用的是帶有過度連接的C刀具補償算法,該算法比較復(fù)雜,與許多因素有關(guān),為此定義了一個結(jié)構(gòu)作為刀補函數(shù)的參數(shù),該函數(shù)更改插補始末位置、增加過渡曲線實現(xiàn)刀補功能。參數(shù)結(jié)構(gòu)如下,

3 結(jié)論
以ARM9微處理器為硬件平臺,免費的Linux操作系統(tǒng)為軟件平臺,開發(fā)了嵌入式數(shù)控銑床,實現(xiàn)了對步進電機和伺服電機的控制。在對制作的電路板和編程的系統(tǒng)程序?qū)嶒灥幕A(chǔ)上表明,與傳統(tǒng)數(shù)控系統(tǒng)相比,嵌入式數(shù)控系統(tǒng)發(fā)揮了其耗能少、成本低、體積小等優(yōu)勢。
來源:互聯(lián)網(wǎng)