
引言
隨著汽車電子技術(shù)的發(fā)展及對汽車性能要求的不斷提高,汽車上的電子裝置越來越多。一輛用傳統(tǒng)布線方法設(shè)計的高檔車中,其電線的長度可達2km ,電氣節(jié)點數(shù)可能高達1500 個,并且保持大約每10 年增長1 倍的發(fā)展速度。在這種狀況下,粗大的線束與汽車中有限的可用空間之間的矛盾越來越尖銳,而且也成為汽車輕量化和進一步電子化的最大障礙。計算機網(wǎng)絡(luò)化的發(fā)展為解決此問題提供了可能。
各大汽車廠商從上世紀70 年代末就開始進行車用網(wǎng)絡(luò)的研究,車用網(wǎng)絡(luò)協(xié)議的標準化研究也在國外迅速地發(fā)展起來。到90 年代初,協(xié)議的研發(fā)到了相對成熟的階段,由于車用電氣的種類繁多,對網(wǎng)絡(luò)的傳輸速度和成本要求差異較大,因此呈現(xiàn)出多元化的趨勢。這些車用協(xié)議中較為突出的是BOSCH公司于20 世紀80 年代初提出的CAN(Controller Area Network) 。還有一些適合不同傳輸速率等級及特殊用途的網(wǎng)絡(luò)協(xié)議,如低速的LIN、中高速的SAE J1939、用于診斷的KWP2000、用于X-by-wire的TTP、多媒體應(yīng)用中的MOST 等協(xié)議。
電動汽車是為解決燃油危機和環(huán)境污染問題孕育而生的。與傳統(tǒng)汽車相比,它的電子裝置更多而且相互間的關(guān)聯(lián)性更強,因此數(shù)據(jù)通信更為重要。各類電動汽車中的控制系統(tǒng)實時采集反映整車和零部件的運行狀態(tài)以及駕駛員意愿的參數(shù),并發(fā)送相關(guān)運行指令。這些功能的實現(xiàn)都對ECU 之間的通信提出了很高的要求,并直接影響了車輛的運行性能和安全性。
我國傳統(tǒng)車用網(wǎng)絡(luò)、總線、通訊協(xié)議的研究起步較晚,基礎(chǔ)相當薄弱,目前在國家“十五”863 計劃的支持下,CAN 總線在各電動汽車整車中得到廣泛應(yīng)用。在自主研發(fā)電動汽車的過程中,充分借鑒、吸收國外的經(jīng)驗,制定出電動汽車用網(wǎng)絡(luò)、總線、通信協(xié)議,可更快地提升我國在此方面的技術(shù)水平。
車輛系統(tǒng)網(wǎng)絡(luò)的研制需事先搭建仿真系統(tǒng)來模擬網(wǎng)絡(luò),調(diào)整和改進設(shè)計。網(wǎng)絡(luò)協(xié)議的制定和實施,必須對其核心的性能指標通過仿真或?qū)嶋H測試進行評價,這樣才能保證在實際應(yīng)用中網(wǎng)絡(luò)正常工作和滿足系統(tǒng)的要求。這一過程對于網(wǎng)絡(luò)上的各個ECU節(jié)點而言都是需要進行的。車用CAN 總線測試臺就是在國家“十五”863 計劃電動汽車重大專項支持下研發(fā)的,通過公共平臺的建設(shè),可以對車用總線協(xié)議進行仿真測試,對整車系統(tǒng)網(wǎng)絡(luò)的性能進行評估,并可以對關(guān)鍵零部件的通訊性能進行測試與評估。
現(xiàn)有CAN 總線網(wǎng)絡(luò)分析評價方法評述
目前,對CAN 總線的分析評價方法主要有數(shù)學建模、網(wǎng)絡(luò)一致性分析及直接測試分析。其中數(shù)學建模通常用于網(wǎng)絡(luò)系統(tǒng)開發(fā)初期和開發(fā)過程中,它是對整個網(wǎng)絡(luò)進行規(guī)劃。而一致性測試及直接測試分析主要是在開發(fā)后期,網(wǎng)絡(luò)投入使用后進行,用來對網(wǎng)絡(luò)性能進行真實的評價。
數(shù)學建模法是建立系統(tǒng)的數(shù)學模型,用演繹推理求解,該模型用數(shù)學形式表示系統(tǒng)的特性和行為,并利用計算機協(xié)助運算,來分析網(wǎng)絡(luò)的性能。根據(jù)網(wǎng)絡(luò)的不同結(jié)構(gòu),作一些合理的近似和假設(shè),建立一些粗略的關(guān)系表達式,來表示各個參量之間的關(guān)
系。
網(wǎng)絡(luò)一致性測試就是測試一個應(yīng)用裝置是否兼容一個給定的規(guī)范或協(xié)議。在網(wǎng)絡(luò)協(xié)議制定完成之后,各開發(fā)單位就會根據(jù)協(xié)議各自對組件進行獨立的開發(fā),當不同組件構(gòu)成網(wǎng)絡(luò)時,不同開發(fā)單位的組件可能不能正常地通信。一致性測試就是測試不同廠商生產(chǎn)上的組件是否能正常地通信,通過經(jīng)驗選擇進行有限數(shù)量的獨立實驗來完成。一致性測試工具順序化、結(jié)構(gòu)化地對一致性測試協(xié)議中描述的內(nèi)容進行測試,測試內(nèi)容可以按實時性的要求級別進行分類。在汽車的應(yīng)用上,有些測試已經(jīng)成為國際標準,例如ISO 16845 描述了CAN 的一致性測試。
直接測試分析,是在真實CAN 總線上借助測試設(shè)備進行系統(tǒng)性能評估。評價總線系統(tǒng)核心性能的主要指標有:總線的傳輸速率;總線吞吐量;總線利用率;消息的傳輸延時時間;節(jié)點ECU 的通訊負載;總線的EMC 特性。
CAN 分析工具多種多樣, 從最低端的RS232CAN 分析儀到Vector 公司的一系列CAN 測試及仿真設(shè)備,都可以對CAN 網(wǎng)絡(luò)進行測試。它們的主要特點是分析總線上運行的數(shù)據(jù)。
以上三種評價方法都具有不同的特點,各自又有一定的局限性。模型仿真與具體實施存在較大的差距,這種差距有可能使仿真結(jié)果無法具體物理實現(xiàn)。利用具有嚴格時間規(guī)則的計算機軟件仿真節(jié)點來代替總線上存在的無序消息的真實節(jié)點進行的部分仿真,其局限性是顯然的。目前已有的網(wǎng)絡(luò)測試產(chǎn)品僅限于對總線上運行的數(shù)據(jù)進行分析,與具體系統(tǒng)的關(guān)聯(lián)性不大。
CAN 總線實時仿真測試平臺的研發(fā)與應(yīng)用
目前已有的測試工具不能方便地對一個分布式實時控制網(wǎng)絡(luò)的CAN 通訊進行全方位的評價。為此,我們提出了網(wǎng)絡(luò)在環(huán)的設(shè)計思想,開發(fā)了CAN總線實時仿真測試系統(tǒng)。整個系統(tǒng)在自己研發(fā)平臺的基礎(chǔ)上,運用國外已有的先進總線測試工具的產(chǎn)品,可對CAN 總線通訊網(wǎng)絡(luò)性能、單個ECU 通訊功能進行分析、測試及評價。
CAN總線實時仿真測試平臺的研發(fā)
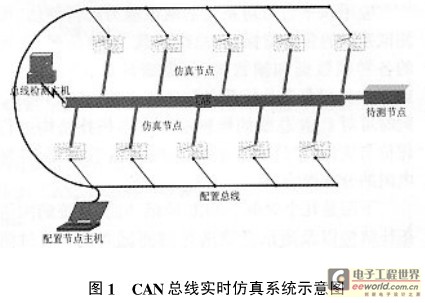
CAN 總線測試平臺拓撲結(jié)構(gòu)如圖1 所示,它由實時仿真節(jié)點、待測節(jié)點和運行在PC 上的相關(guān)軟件組成。其中實時仿真節(jié)點由微處理器與PhilipsSJA100 CAN 控制器構(gòu)成的真實結(jié)點,通過RS485 接收運行在PC 機上配置與監(jiān)控軟件發(fā)送的配置信息,仿真某一特定ECU 的通訊功能,定時向總線上發(fā)送特定的信息,從總線上接收信息,并上傳其運行狀態(tài);待測節(jié)點為真實網(wǎng)絡(luò)系統(tǒng)中的ECU 節(jié)點;在PC 機上運行一些相關(guān)的測試軟件, 如: CANoe 、CANScope 以及仿真結(jié)點配置軟件與監(jiān)控軟件。該測試平臺可測試系統(tǒng)的各項指標,如總線負載、發(fā)送延遲、錯誤統(tǒng)計、MCU 的通訊負載分析及各種干擾對總線的影響等。
CANoe 是進行CAN 通訊網(wǎng)絡(luò)監(jiān)測和分析的工具,同時具有強大的系統(tǒng)仿真功能。CANoe 可以建立系統(tǒng)的仿真結(jié)構(gòu)與節(jié)點、消息及信號的數(shù)據(jù)庫,通過采用其編程語言CAPL 可以進行節(jié)點仿真,對總線上的數(shù)據(jù)能進行動態(tài)的跟蹤并能顯示統(tǒng)計信息。它能夠測量的總線數(shù)據(jù)有:總線負載,峰值負載,總線的各種幀數(shù)據(jù)和幀數(shù)統(tǒng)計,在PC 上消息發(fā)送與接收延時。
波形的質(zhì)量決定了數(shù)據(jù)傳輸?shù)目煽啃?所以要對CAN 總線的物理層進行評價,評價傳輸介質(zhì)、總線CAN 收發(fā)器、終端電阻的分布影響。CANscope 網(wǎng)絡(luò)示波器就是CAN 物理層分析工具。它通過串行總線與PC 相連,記錄模塊能數(shù)字化CAN 總線上的消息并儲存以便采用軟件進行分析,前觸發(fā)模式可以捕捉一幀CAN 消息或一個錯誤幀的前后相鄰數(shù)據(jù)。分析軟件顯示總線電壓值、差分電壓值及填充位隨時間的變化。在跟蹤窗口中可以顯示CAN 消息幀、消息幀的各個組成部分以及錯誤幀。
CAN 網(wǎng)絡(luò)具有很強的錯誤處理能力,當網(wǎng)絡(luò)中的節(jié)點遭受嚴重干擾時,它能自動脫離總線,從而不會影響整個網(wǎng)絡(luò)的信息交互。ISO11519-2 規(guī)定了CAN 總線對于節(jié)點失靈的容錯能力,因此要根據(jù)要求測量CAN 網(wǎng)絡(luò)對于干擾或者節(jié)點失靈情況的容錯能力。為了測試在受到干擾或者節(jié)點失靈的情況下網(wǎng)絡(luò)是否還能正常工作,CANstress 模擬總線干擾工具可以直接聯(lián)入CAN 總線上,通過軟件控制,可以模擬出各種不同的干擾和失靈情況,以便觀察網(wǎng)絡(luò)在干擾和失靈情況下的運行情況。它有兩種工作方式,一種是破壞節(jié)點上發(fā)送的消息來測試網(wǎng)絡(luò)的抗干擾能力。另一種方式是設(shè)置外部設(shè)備來模擬發(fā)生故障的節(jié)點。
CAN總線實時仿真測試平臺的應(yīng)用
應(yīng)用該平臺可對系統(tǒng)的通訊能力進行評估,可測試系統(tǒng)的各項指標,如總線負載、峰值負載、總線的各種幀數(shù)據(jù)和幀數(shù)統(tǒng)計、發(fā)送延遲、錯誤統(tǒng)計、MCU 的通訊負載分析及各種干擾對總線的影響等。同時可對CAN 總線的物理層和網(wǎng)絡(luò)拓撲結(jié)構(gòu)進行評價與優(yōu)化,評價傳輸介質(zhì)、總線CAN 收發(fā)器、終端電阻的分布影響。
下面是幾個對單個ECU 通訊功能、系統(tǒng)的網(wǎng)絡(luò)拓撲結(jié)構(gòu)以及通訊介質(zhì)選擇的測試實例。通過測試,可以進一步改進整個網(wǎng)絡(luò)系統(tǒng)的性能。
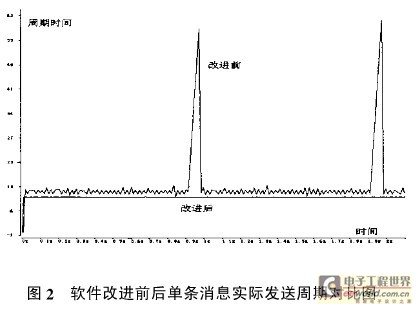
(1) 單個ECU 通訊部分實時性的對比測試
該測試的目的是觀察相關(guān)軟件功能對消息延時的影響,圖2 所示為消息發(fā)送周期軟件修改前后對比圖。通過測試發(fā)現(xiàn)某條消息的延時比較大,通過軟件進一步優(yōu)化可以消除延時現(xiàn)象。
(2) 不同網(wǎng)絡(luò)拓撲結(jié)構(gòu)的對比測試
利用該系統(tǒng)可測試比較不同拓撲結(jié)構(gòu)時總線的抗干擾能力,圖3 所示為終端電阻位置改變信號傳輸波形對比圖。由圖可看出終端電阻位置的不同對總線系統(tǒng)的抗干擾能力有很大影響,在實際系統(tǒng)中應(yīng)注意它的分布位置。

(3) 通訊介質(zhì)選擇不當?shù)男盘杺鬏敳ㄐ?/p>
通訊介質(zhì)的選擇對總線系統(tǒng)的通訊是至關(guān)重要的。圖4 所示為一種通訊介質(zhì)的物理層信號圖,與圖3 中終端電阻調(diào)整后的物理層信號圖相比,抗干擾能力明顯降低。因此,在設(shè)計系統(tǒng)時,應(yīng)選擇好通訊介質(zhì)。

結(jié)束語
隨著CAN 總線在汽車中的使用,分布式實時系統(tǒng)在汽車中的應(yīng)用越來越多。在分布式實時系統(tǒng)中,網(wǎng)絡(luò)的實時性直接影響到系統(tǒng)的實時性,而網(wǎng)絡(luò)的實時性主要由網(wǎng)絡(luò)性質(zhì)、信息流量以及系統(tǒng)中各節(jié)點對網(wǎng)絡(luò)信息的響應(yīng)速度決定。當系統(tǒng)的網(wǎng)絡(luò)性質(zhì)和信息流量基本確定之后,與網(wǎng)絡(luò)實時性直接相關(guān)的是各節(jié)點對網(wǎng)絡(luò)信息的響應(yīng)速度。而目前常用的CAN 總線測試系統(tǒng)都不具備此測試功能,當它們用于分布式實時系統(tǒng)網(wǎng)絡(luò)測試時,很難涉及網(wǎng)絡(luò)的實時性。在研發(fā)總線測試平臺時,考慮到整個系統(tǒng)的特點,提出網(wǎng)絡(luò)在環(huán)設(shè)計方法,將網(wǎng)絡(luò)的實時性作為整個測試系統(tǒng)實時性的一個重要因素貫穿于整個設(shè)計、分析和測試過程。該CAN 總線實時仿真測試平臺為研究制定我國自己的電動汽車通訊協(xié)議和測試、評價CAN 總線通訊網(wǎng)絡(luò)性能奠定了很好的基礎(chǔ),同時它可用于車用CAN 總線相關(guān)技術(shù)的研發(fā)。對于不同性能的CPU ,整個測試系統(tǒng)的性能會有較大的差別,為此,目前正在開發(fā)更高性能CPU 為核心的測試系統(tǒng),以滿足日益發(fā)展的整車控制系統(tǒng)的需要。