
引言
交通事故因其極強的“殺傷力”被稱為世界“頭號殺手”。作為智能交通系統(tǒng)重要基礎(chǔ)之一的車輛網(wǎng)絡(luò)概念就是在這種需求背景下提出的。車載自組網(wǎng)是專門為車輛問通信而設(shè)計的自組織網(wǎng)絡(luò),它創(chuàng)造性地將自組網(wǎng)技術(shù)應(yīng)用于車輛間通信,使司機能夠在超視距的范圍內(nèi)獲得其他車輛的狀況信息(如車速、方向、位置、剎車板壓力等)和實時路況信息。車載自組網(wǎng)的設(shè)計目標(biāo)是建立一個車輛間通信的平臺,不僅提高交通效率,還為司機的通行帶來可靠安全和多重便利,使旅行者更加舒適。在2003年I1ru—T的汽車通信標(biāo)準(zhǔn)化會議上,各國專家提出的車用自組織網(wǎng)絡(luò)(VANET,vehicle ad-hocnetworks)技術(shù)有望在2010年將交通事故帶來的損失降低50%。
2 車載自組網(wǎng)簡介
自組網(wǎng)是一種無線分布式結(jié)構(gòu),強調(diào)的是多跳、自組織、無中心的概念。因此可以把車載自組網(wǎng)(VANET,vehicle ad hoc networks)定義為一種快速移動戶外通信網(wǎng)絡(luò)(fast moving outdoor commu—nication network),也有人把車載自組網(wǎng)稱為自組織交通信息系統(tǒng)(SOTIS,self-organizing traffic informationsystem)。車載自組網(wǎng)的基本思想是在一定通信范圍內(nèi)的車輛可以相互交換各自的車速、位置等信息和車載傳感器感知的數(shù)據(jù),并自動的連接建立起一個移動的網(wǎng)絡(luò)。節(jié)點的單跳通信范圍只有幾百米到一千米,每一個節(jié)點(車輛)不僅是一個收發(fā)器,同時還是一個路由器,因此采用多跳的方式把數(shù)據(jù)轉(zhuǎn)發(fā)給更遠的車輛。
2.1 網(wǎng)絡(luò)結(jié)構(gòu)
整個車載自組網(wǎng)分為兩部分:車與車(V2V,vehicle to vhicle)和車與設(shè)施(V2I,vehicle toinfrastructure)。圖1顯示了車載自組網(wǎng)在真實環(huán)境中應(yīng)用的一個模型示意:

可以看到,衛(wèi)星通信系統(tǒng)分別為車載自組網(wǎng)提供全球定位服務(wù)(GPS,global positioning system)和數(shù)字多媒體服務(wù)(DMB,digital multimedia broad—casting)。車與車通信使車輛之間能夠通過多跳的方式進行自動互聯(lián),這好比車與車之間能夠像人一樣互相交談,起到提高車輛運行的安全和疏導(dǎo)交通流量等作用。車載自組網(wǎng)除了可以單獨組網(wǎng)實現(xiàn)局部的通信外,還可以通過路燈、加油站等作為接入點的網(wǎng)關(guān)(gateway),連接到其他的固定或移動通信網(wǎng)絡(luò)上,提供更為豐富的娛樂、車內(nèi)辦公等服務(wù)。在本文中,針對車載自組網(wǎng)的特點和技術(shù)難點,主要討論車與車之間通信的自組網(wǎng)方式。
2.2 主要特點
車載自組網(wǎng)是極其特殊的移動自組織網(wǎng)絡(luò),它同樣存在一般無線自組網(wǎng)所固有的問題,如隱藏點問題、暴露點問題、信道捕獲問題等,不過也帶有自身獨特的特性。車載自組網(wǎng)的主要特點包括:
① 由于節(jié)點高速移動性(速度大致在5-42m/s之間),導(dǎo)致網(wǎng)絡(luò)拓撲結(jié)構(gòu)變化快,路徑壽命短,例如平均速度為lOOkm/h的道路上,如果節(jié)點的覆蓋半徑為250m,則鏈路存在15s的概率僅為57%。
② 無線信道質(zhì)量不穩(wěn)定,受多種因素影響,其中包括路邊建筑、道路情況、車輛類型和車輛相對速度等。
③ 節(jié)點通過發(fā)動機可以提供源源不斷的電力支持,車輛的承載空間也可以確保天線的尺寸和其他額外的通信設(shè)備,同時還具有強大的計算能力和存儲能力等。
④ 節(jié)點移動具有一定的規(guī)律性,只能沿著車道單/雙向移動,具有一維性。
⑤ 道路的靜態(tài)形狀使得車輛移動是受限制的,車輛軌道一般可預(yù)測。
⑥ GPS能夠為節(jié)點提供精確定位和精準(zhǔn)時鐘信息,利于獲取自身位置信息和進行時鐘同步。
⑦ GPS和電子地圖相結(jié)合,利用路徑規(guī)劃功能,將使車載自組網(wǎng)路由策略的實現(xiàn)變得更為簡單。
2.3 應(yīng)用舉例
車載自組網(wǎng)在交通運輸中出現(xiàn),將會擴展司機的視野與車載部件的功能,從而提高道路交通的安全與高效。典型的應(yīng)用包括:
① 行駛安全預(yù)警。利用車輛間相互交換狀態(tài)信息,通過車載自組網(wǎng)提前通告給司機,建議司機根據(jù)情況作出及時、適當(dāng)?shù)鸟{駛行為,這便有效的提升了司機的注意力,提高駕駛的安全性。
② 協(xié)助駕駛。幫助駕駛員快速、安全的通過“盲區(qū)”,例如在高速路出/入口或交通十字路口處的車輛協(xié)調(diào)通行。
③ 分布式交通信息發(fā)布。改變傳統(tǒng)的基于中心式網(wǎng)絡(luò)結(jié)構(gòu)的交通信息發(fā)布形式,車輛從車載自組網(wǎng)中獲取實時交通信息,提高路況信息的實時性,例如,綜合出與自身相關(guān)的車流量狀況,更新電子地圖以便更高效地決定路徑規(guī)劃。
④ 基于通信的縱向車輛控制。通過車載自組網(wǎng),車輛能根據(jù)尾隨車輛和更多前邊視線范圍外的車輛相互協(xié)同行駛,這樣能夠自動形成一個更為和諧的車輛行駛隊列,避免更多的交通事故。
3物理層參數(shù)
由于車載自組網(wǎng)獨特的性質(zhì),決定了其對物理層的要求比較苛刻:要求在高速移動的環(huán)境下具有較強的頑健I生,減少因高速移動引起的信號突變所帶來的影響,尤其是在高速下產(chǎn)生的多普勒效應(yīng)等的影響;支持高速率傳輸,提供多跳連接(甚至是在節(jié)點密度比較小的情況下),保證足夠的信息交互;而且對于安全報警信息延遲要非常小,支持突發(fā)性數(shù)據(jù)流,保證其實時性;與MAC層協(xié)議接口相匹配;另外,需要工作在無需授權(quán)的頻段內(nèi),以保證其應(yīng)用普及。
目前國外所應(yīng)用的車載自組網(wǎng)系統(tǒng)所采用的物理層技術(shù)主要是基于802.1l(Wi—Fi) 標(biāo)準(zhǔn)和UTRA—TDD(TD—CDMA)技術(shù),例如CarTalk與FleetNet項目都采用了UTRA—TDD技術(shù),C2C聯(lián)盟則主張使用改進后的802.1lb技術(shù)。通過表1,可以對802.1lb和UTRA—TDD在物理層中所采用的一些不同參數(shù)進行簡單比較。
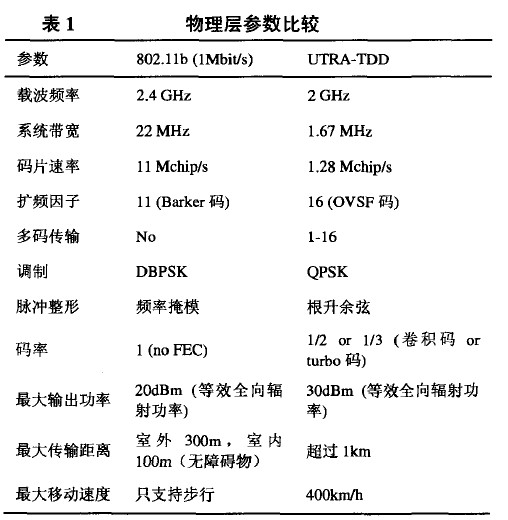
由上表可以看出802.1lb的性能要差很多,但是由于802.1lb無線模塊目前應(yīng)用普及、價格便宜、實現(xiàn)簡單,而且工作在2.4GHz的免費頻段等特點,廣泛被科研實驗所采用:而UTRA—TDD技術(shù)實現(xiàn)復(fù)雜,造價較高,還有一些非技術(shù)因素阻礙其應(yīng)用。
所以說這2種技術(shù)各有長短。此外,目前在我國最為普及的GSM 移動通信技術(shù),其穩(wěn)定的性能被大家所接受, 而支持自組織方式的GSM 網(wǎng)絡(luò)(A—GSM[301)是受Lucent技術(shù)公司資助,對下一代GSM蜂窩網(wǎng)中繼能力進行研究的課題:該課題研究人員試圖在盡可能減少對現(xiàn)有GSM 系統(tǒng)改動的基礎(chǔ)上,使移動臺具有中繼功能,由此來增強GSM網(wǎng)絡(luò)的覆蓋能力。由此可見GSM 技術(shù)應(yīng)用在自組網(wǎng)中是可行的,其性能也完全符合車載自組網(wǎng)的要求,所以車載自組網(wǎng)物理層也可以嘗試采用GSM技術(shù)。
無論802.1 lb、UTRA—TDD還是GSM 技術(shù)都是一種中心式結(jié)構(gòu)的網(wǎng)絡(luò),將其應(yīng)用于分布式網(wǎng)絡(luò)在很多方面需要進行改進。首先,空中接口需要適應(yīng)高速動態(tài)變化的網(wǎng)絡(luò)拓撲;將中心控制的無線媒介訪問機制修改成分布式的媒介訪問機制;修改由基站控制的無線資源管理機制為節(jié)點自行管理協(xié)同合作的機制;面對更為惡劣的多徑效應(yīng)、能量控制算法和時隙同步等問題。以時隙同步為例,它既不像在UTRA—TDD、GSM 終端設(shè)備接入基站時由基站負責(zé)進行同步,也不像在802.1lb中AP定期地發(fā)送信標(biāo)(beacon)幀保持相同物理網(wǎng)中的工作站同步。在車載自組網(wǎng)中時隙同步問 可以通過引入GPS進行粗略同步,再加上一些特定機制進行精確同步,比如在幀中設(shè)計特定的同步時隙。無論是理論分析還是在實際的高速公路或城市道路中進行的仿真測試,都能得出一個結(jié)論:
UTRA-TDD比IEEE 802.1lb具有更大的優(yōu)勢。
對于物理層除了技術(shù)因素外,還有一些非技術(shù)因素阻礙其選取,比如說占用的頻段。在國外,2003年,美國的聯(lián)邦通信委員會專門為車輛間通信劃分了一個75MHz(5.85—5.925GHz)的免費頻帶帶寬用于專用短距離通信(DSRC,dedicated short rangcommunication),而歐洲的郵政電信組織(CEPT)也已經(jīng)為UTRA.TDD技術(shù)提供了免除執(zhí)照發(fā)放的2010到2020MHz頻段,日本的DEM02000項目采用的專用短程通信技術(shù)(DSRC)也有專門的免費頻段。可見,在車載自組網(wǎng)技術(shù)發(fā)展比較好的國家都有一個免費頻段供其使用,因此,在我國劃分一個供車載自組網(wǎng)使用的免費頻段勢在必行,以利于其更好的在國內(nèi)推廣。
綜合以上物理層的特性,對于車載自組網(wǎng)物理層的選擇標(biāo)準(zhǔn)初步總結(jié)如下:
①適合節(jié)點高速移動,初步設(shè)計移動速度上限為150km/h;
②通訊距離在lkm左右;
③帶寬在1Mbit/s左右;
④實時性強,支持同步,傳輸延時足夠小;
⑤頻率最好是免費頻段(可以考慮2.4GHz的ISM免費頻段)。
4 MAC層協(xié)議
MAC協(xié)議是報文在信道上發(fā)送和接收的直接控制者,它的優(yōu)劣直接影響到極為有限的無線資源的使用效率,對車載自組網(wǎng)的性能起著決定性的作用。MAC層除了需要解決隱藏終端,暴露終端和資源分配的公平性等普遍問題外,車載自組網(wǎng)特定的應(yīng)用環(huán)境和業(yè)務(wù)需求是其要面臨的特殊問題:如車載終端移動速度快,網(wǎng)絡(luò)的拓撲結(jié)構(gòu)高度動態(tài)變化,需要支持突發(fā)的優(yōu)先級高,實時性強的交通安全類業(yè)務(wù)應(yīng)用,許多實時業(yè)務(wù)需要以廣播形式發(fā)送等。因此,基于自組網(wǎng)的車載通信系統(tǒng)MAC協(xié)議需要具備以下特征:
①支持車輛高速移動性;
②保證通信的實時性和可靠性;
③具有較好的可擴展性;
④具有較高的帶寬利用率;
⑤采用全分布式自組網(wǎng)方式;
⑥為每個用戶提供公平的通信機會;
⑦提供高效、及時的廣播機制。
4.1 幀結(jié)構(gòu)
由于目前所應(yīng)用的車載自組網(wǎng)物理層一般是基于802.11標(biāo)準(zhǔn)和UTRA.TDD技術(shù)的,因此建立在物理層之上的MAC層的幀結(jié)構(gòu)一般也是有兩類的。
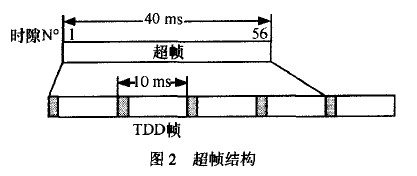
由于需要將中心式結(jié)構(gòu)的UTRA.TDD應(yīng)用到分布式系統(tǒng)中,所以要在很多方面做出調(diào)整和改進。首先對MAC層的幀結(jié)構(gòu)進行重新設(shè)計,每一幀的時長為10ms,每一幀由15個時隙構(gòu)成,每4幀又構(gòu)成一個超級幀,如圖2所示。
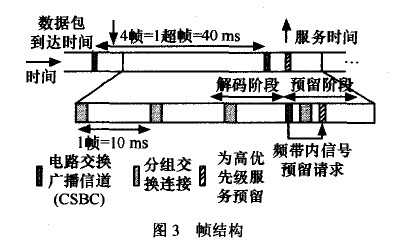
為了避免在隨機信道接入機制下的保留請求沖突,一種電路交換廣播連接(CSBC,circuit.switched broadcast channe1)被引入,它主要用來作為信令目的。如果在幀中沒有足夠的容量來支撐數(shù)據(jù)的發(fā)送,節(jié)點就可以利用CSBC來發(fā)送額外容量保留請求,如圖3所示。
4.2 接入方式
MAC層主要是完成無線資源分布式仲裁和管理的工作,其接入方式首先需要考慮的是一個公平性的問題,可以從兩個角度進行考慮:①從節(jié)點的角度出發(fā),力圖保證節(jié)點之間占用的信道帶寬相等。②從業(yè)務(wù)流的角度考慮,力圖保證業(yè)務(wù)流之間占用的信道帶寬相等。但是,不論從哪個角度考慮該問題,最終都歸結(jié)為如何在MAC協(xié)議中確保每個網(wǎng)絡(luò)節(jié)點的公平接入。
4.2.1 802.11DCF
目前,應(yīng)用較為廣泛的自組網(wǎng)MA C 協(xié)議是IEEE 802.11DCFt2sl協(xié)議。該協(xié)議基于CSMA/CA,節(jié)點首先通過競爭進行 rS,CTS信息的交互,在此基礎(chǔ)上實現(xiàn)信道的分配,過程如圖4 所示。
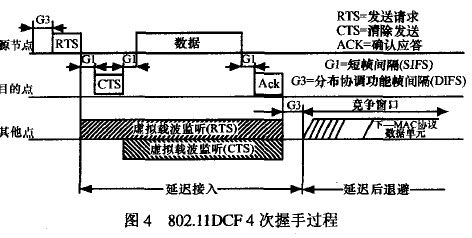
802.11DCF協(xié)議在本質(zhì)上是以較小的RTS,CTS分組的交互,分配較大的無線資源,從而提高無線資源的利用率。
圖中發(fā)送方在發(fā)送數(shù)據(jù)之前應(yīng)先發(fā)控制幀RTS;如果接收方收到RTS,在SIFS時間后用控制幀CTS對RTS進行確認;發(fā)送方收到確認的CTS,在等待SIFS時間后發(fā)數(shù)據(jù)包;接收方收到數(shù)據(jù)包,在等待SIFS時間后用ACK確認;發(fā)送方收到ACK后,數(shù)據(jù)包發(fā)送完畢。
然而,802.11DCF協(xié)議是為支持分組突發(fā)業(yè)務(wù)而設(shè)計的,它不支持實時業(yè)務(wù)。另外,802.11DCF協(xié)議采用的時間隨機退避機制不適用于同步網(wǎng)絡(luò)。
而車載自組網(wǎng)對數(shù)據(jù)的實時性要求很高,適合采用基于預(yù)約方式的同步MAC協(xié)議,因此基于競爭方式的802.11DCF不太適合在車載自組網(wǎng)中應(yīng)用。
4.2.2 RR—ALOHA
在車間通信中要求具備較多的是廣播特性,因此對MAC層的可靠性要求非常嚴格。目前,對無連接業(yè)務(wù)的可靠性保證研究不多,針對車載自組網(wǎng)的可靠廣播研究也很少,目前提出的方法有:在廣播中增加控制幀劃分路段轉(zhuǎn)發(fā)數(shù)據(jù)包等。為了實現(xiàn)上述的分布式接入策略,根據(jù)車載自組網(wǎng)的特點提出了一種新的隨機接入方式RR—ALOHA [ (reliable reservation AL OHA),該協(xié)議在R—ALOHA基礎(chǔ)上改進:
①解決了隱藏終端和暴露終端的問題;
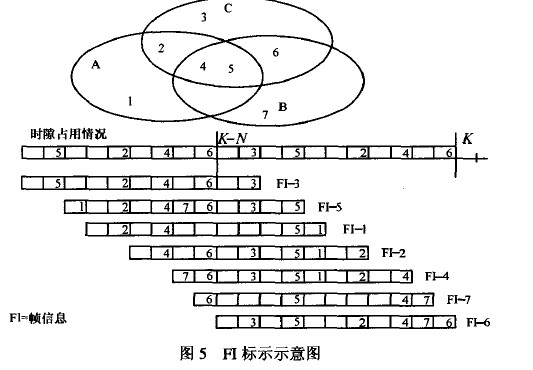
② 通過每幀周期廣播幀信息(FI,frame information),使所有的鄰節(jié)點都知道每一個時隙的信道使用狀況,從而使RR—AL OHA協(xié)議能夠在車載自組網(wǎng)中正確運行。FI是發(fā)送節(jié)點感知的前一幀的時隙狀態(tài)信息。RR—AL OHA 可以在不同的物理層標(biāo)準(zhǔn)下使用,尤其適合采用時隙結(jié)構(gòu)的物理層。當(dāng)有節(jié)點加入時,先偵聽一幀的時間,然后選擇一個空閑時隙發(fā)送一個分組,來預(yù)約這個時隙。如果鄰節(jié)點正確接收到了該分組,則在它的FI中標(biāo)示出來。當(dāng)新加入的節(jié)點從一幀時間內(nèi)收到的所有FI中知道鄰節(jié)點都正確接受到分組時,即認為預(yù)約成功,從而將每幀的該時隙作為它的基本信道(BC,base channe1),直到節(jié)點離開網(wǎng)絡(luò),在這期間其他節(jié)點不能訪問該時隙。其中,BC 信道用于傳送FI、其他信令信息和承載有效載荷。在每一幀中,節(jié)點都必須在自己的BC中發(fā)送FI信息,并根據(jù)鄰節(jié)點的FI和自己的信道使用情況及時更新FI信息。當(dāng)BC信道提供的帶寬不能滿足業(yè)務(wù)的要求時,節(jié)點可以通過預(yù)約附加信道的方式占用其他空閑信道,以滿足業(yè)務(wù)要求。如果是點對點通信,節(jié)點還可以預(yù)約點對點(P2P,point—to—point)信道進行傳送,以實現(xiàn)相鄰一跳群中的時隙復(fù)用,提高信道的利用率。圖5顯示了節(jié)點交換FI信息的示例。
4.2.3 CSM CA和RR—AL OHA 的比較
對于常見自組網(wǎng)一般采用兩種類型的MAC協(xié)議:一種是基于CSMMCA的異步競爭式MAC協(xié)議,另一種是基于時隙的同步預(yù)約式MAC協(xié)議。
不過對于車載自組網(wǎng)的特殊性,預(yù)約式的同步MAC協(xié)議效果可能更好些。表2對CSMA/CA 和RR—ALOHA 這兩種MAC協(xié)議進行了簡單的比較。

這兩種MAC協(xié)議各有利弊,通過進一步分析,似乎RR—AL OHA更適合于在車載自組網(wǎng)中使用,但是在RR—ALOHA中不能忽視的一點是,節(jié)點通信范圍內(nèi)的鄰居節(jié)點數(shù)不能超過1幀中的時隙數(shù)。
4.2.4 令牌環(huán)
除了基于CSMA/CA和時隙類的MAC協(xié)議外,還有一些其他類型的MAC協(xié)議,如令牌環(huán)。在具備GPS系統(tǒng)的車輛問可以使用基于非競爭性的令牌環(huán)接入方式(如WTRP協(xié)議),以提高信道利用率,避免信道沖突,更能滿足車輛間安全預(yù)警通信的時延要求。在車載自組網(wǎng)中應(yīng)用令牌環(huán)的主要思想:在廣播信道上通過令牌組成邏輯環(huán)來控制信道的接入,為表述方便,稱本車輛(對應(yīng)通信網(wǎng)絡(luò)中的本地節(jié)點)為TS(this station);前一車輛(對應(yīng)通信網(wǎng)絡(luò)中的上一節(jié)點)為PS(previous station);后續(xù)車輛(對應(yīng)通信網(wǎng)絡(luò)中的后續(xù)節(jié)點)稱為NS(next smtion)。考慮實際車輛隊列中,設(shè)車輛A,B,C構(gòu)成隊列,隊列內(nèi)采用無線令牌環(huán)協(xié)議,三輛車組成邏輯令牌環(huán),令牌傳遞順序為A—B—C—A。設(shè)某一時刻B為令牌擁有者,令B為TS,相應(yīng)的A為PS,C為NS。網(wǎng)絡(luò)結(jié)構(gòu)示意如圖6所示,圖中箭頭方向表示令牌傳遞方向,當(dāng)車輛持有令牌后才能開始進行數(shù)據(jù)的發(fā)送,而那些沒有持有令牌的車輛只能進行數(shù)據(jù)的接受。當(dāng)傳送完一定的數(shù)據(jù)后,令牌擁有者把令牌傳遞給后續(xù)車輛,開始下一輛車的數(shù)據(jù)傳送。
5 路由協(xié)議
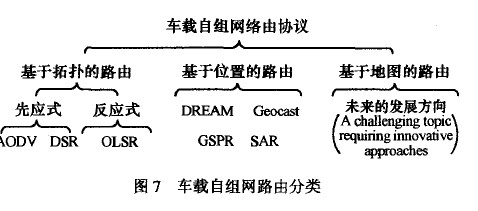
由于車載網(wǎng)絡(luò)拓撲的頻繁變化,節(jié)點移動速度很快,路由技術(shù)成為了車載自組網(wǎng)中的重大挑戰(zhàn)之一。在早期實驗平臺中使用的是一些簡單洪泛路由技術(shù)。目前,在車載自組網(wǎng)中使用的路由協(xié)議大致可以分為3 類:
① 基于拓撲的路由(TBR,topology—based routing)協(xié)議;
②基于位置的路(PBR,position—based routing,)協(xié)議;
③基于地圖的路(MBR,map—based routing)協(xié)議,如圖7所示。
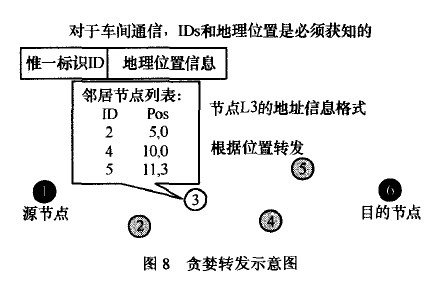
GPSR(greedy perimeter state—less Routing)是比較有名的利用地理位置來優(yōu)化路由協(xié)議,基本思想是:節(jié)點在發(fā)送數(shù)據(jù)前不尋找路由,不保存路由表。移動節(jié)點直接根據(jù)位置信息(包括自己的、鄰節(jié)點的以及目的節(jié)點的位置信息)制定數(shù)據(jù)轉(zhuǎn)發(fā)決策。數(shù)據(jù)分組中通常攜帶目的節(jié)點的地理位置信息。網(wǎng)絡(luò)中相鄰節(jié)點問通過周期性廣播分組獲得其他節(jié)點的位置信息。源節(jié)點或中間節(jié)點根據(jù)這些位置信息,將數(shù)據(jù)分組傳送給一個或多個相對自己而言距離目的節(jié)點更近的鄰節(jié)點,如圖8所示。GPSR在高速公路上性能不錯,但是在城市環(huán)境中存在著缺陷。
空間感知路由協(xié)議SAR(spatialaware routing)是針對路由空洞障礙的進一步改進,也可以說是在GPSR路由協(xié)議的基礎(chǔ)上的進一步改進,基本思想是:建立一個網(wǎng)路節(jié)點組成的空問模型圖,模型圖中的點表示車輛網(wǎng)絡(luò)中的一些重要連接點(車輛、路邊設(shè)施等),邊表示連接點之問的連接。圖中的點是根據(jù)GIS中有用信息午提取出來,最后通過編寫一個地理數(shù)據(jù)文件(geographic data files)語法分析器,從空間模型圖中提取道路的相關(guān)信息。把源節(jié)點和目的節(jié)點的位置映射到空問模型中,然后利用圖論中的最短路經(jīng)算法來計算源到目的節(jié)點的路徑。但是空間感知路由協(xié)議SAR存在一個缺點,空間模型建立是否準(zhǔn)確,決定了路徑上是否有合適的轉(zhuǎn)發(fā)節(jié)點。
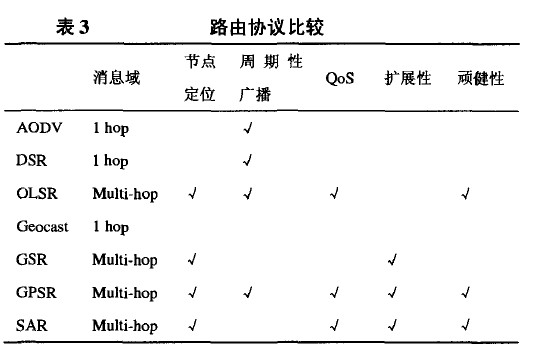
通過表3,對車載自組網(wǎng)中使用的路由技術(shù)進行一個橫向比較:
6 結(jié)語
隨著人們對個人通信要求的提高,人們越來越希望有一種更安全、高效率的方式移動到目的地,車載自組網(wǎng)將會是未來的重點發(fā)展方向,其中MAC層和路由層的設(shè)計將是車載自組網(wǎng)所面臨的最重大挑戰(zhàn),MAC層需要解決的問題有無線信道劃分、分配和能力控制,向網(wǎng)絡(luò)層提供統(tǒng)一的服務(wù),屏蔽物理層不同的信道控制方式,實現(xiàn)擁塞控制、優(yōu)先級排隊、分組發(fā)送、確認、差錯控制和流量控制等;路由層的側(cè)重點在于如何建立完全分布式的、適合高速拓撲變化車載網(wǎng)絡(luò)的路由協(xié)議。最終整個車載自組網(wǎng)的目標(biāo)是制定一個通信標(biāo)準(zhǔn)協(xié)議,使不同廠商的車輛之間都能實現(xiàn)自由通信。