
關(guān)鍵詞:滑模;軟起動器;Simulink;斜坡起動;限流起動;轉(zhuǎn)矩控制起動;分級變頻起動
0 引言
不同的電機軟起動方式具有各異的特性。斜坡起動、限流起動解決電機起動過程產(chǎn)生的過大沖擊電流,這種起動方式適合于輕載電機起動;轉(zhuǎn)矩控制起動、分級變頻起動可以解決使用降壓起動帶來的起動轉(zhuǎn)矩過小的問題,適用于重載的電機起動。構(gòu)建適應(yīng)不同工作場合需
要的電動機滑模軟起動控制器具有工程應(yīng)用價值。滑模軟起動裝置集斜坡起動、限流起動、轉(zhuǎn)矩控制起動、分級變頻起動等方式于一體,通過改變對交流模塊輸入的晶閘管導通脈沖選擇電動機的軟起動方式,進而擴大軟起動裝置的使用范圍。本文在Matlab/Simulink環(huán)境下對滑模軟起動進行了建模仿真研究。
1 軟起動器的控制系統(tǒng)結(jié)構(gòu)
1.1 仿真系統(tǒng)建模
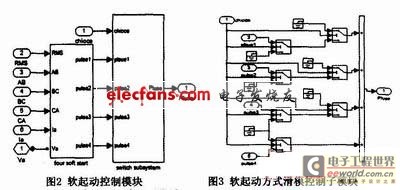
在Mafiab/Simulink環(huán)境中,建立一個軟起動器的模型,其綜合了斜坡軟起動、限流軟起動、轉(zhuǎn)矩控制軟起動及分級變頻軟起動這幾種軟起動方式。并且使該軟啟動器實現(xiàn)能夠讓用戶根據(jù)需要,選擇一種適合用于電機軟起動的方式進行起動。圖1是基于Simulink的系統(tǒng)仿真框圖。在仿真系統(tǒng)中,主要包括了滑模軟起動控制、交流調(diào)壓、電機和電氣測量模塊等單元。

滑模軟起動控制模塊是由4個軟起動子模塊(four soft start)和軟起動方式滑模選擇模塊(switch subsystem)組成。輸入量有電機定子電流單相有效值RMS、電機A相輸入的電壓值Va與電流值Ia和同步電壓。
1.2 觸發(fā)脈沖子模塊
在整個系統(tǒng)中的晶閘管的觸發(fā)脈沖主要使用6脈沖發(fā)生器模塊來產(chǎn)生,并且能夠?qū)?脈沖進行延遲,生成一組可控的6相脈沖波。產(chǎn)生的6相脈沖在4個軟起動方式中都有使用。其中圖4是六脈沖發(fā)生器的子系統(tǒng)。
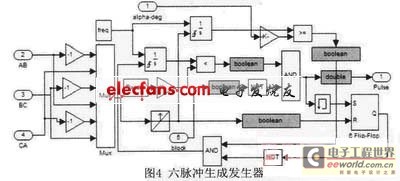
在6脈沖發(fā)生器模塊中,有兩個常量“Pwidth”和“freq”,“Pwidth”的值為6相觸發(fā)脈沖的寬度;“freq”為同步電壓頻率;從“alpha deg”輸入端輸入觸發(fā)角的值,可以是一組連續(xù)變量,通過對“alpha_deg”的值生成一組可控的晶閘管導通的6相脈沖;“block”是6脈沖發(fā)生器的鎖存端,輸入端為零時,模塊正常工作產(chǎn)生一組6相脈沖;當輸入端為高電平時,啟動截止保護,這時脈沖將不再產(chǎn)生,晶閘管也就不能導通。
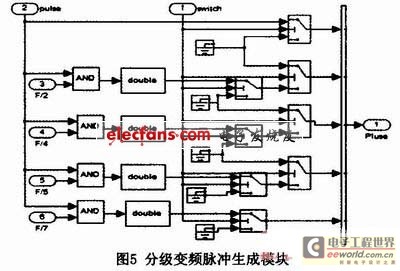
但是在6脈沖生成器模塊中,其脈沖生成是根據(jù)電源的同步電壓進行計算,子系統(tǒng)中的頻率設(shè)置和同步電壓的頻率是保持一致的,生成的6相脈沖頻率不可改變。在分級變頻軟起動模塊中,晶閘管的6相導由6相脈沖發(fā)生器產(chǎn)生的一組基頻的脈沖波和一組低頻的脈沖進行與運算生成,這組脈沖是以低頻脈沖的頻率做為頻率,以基波脈寬作為脈沖寬度,并且可以通過“alpha deg”對脈沖進行延遲。這樣生成一組低頻的導通角可控的低頻脈沖,滿足分級變頻軟起動的脈沖要求。在圖5分級變頻脈沖合成模塊中,頻率分別為F/2、F/4、F/5、F/7的方波脈沖和6脈沖發(fā)生器產(chǎn)生的脈沖進行與運算,生成F/2、F/4、F/5、F/7頻率方波,并根據(jù)輸入的時間選擇各個分級頻率運行時間,完成分級變頻軟起動控制。
2 軟起動控制方式
在軟起動的仿真系統(tǒng)中,軟起動模塊中有四種軟起動方式的子模塊,分別是斜坡軟起動、限流軟起動、分級變頻軟起動和轉(zhuǎn)矩控制軟起動子模塊。四種軟起動是通過對晶閘管的導通角(alpha)不同計算方法,產(chǎn)生相適應(yīng)的四種軟起動方式的六脈沖,達到各自的軟起動的目的。
2.1 斜坡軟起動

斜坡式軟起動是從初始角開始以斜坡的方式增加電動機上的電壓直到額定電壓的軟起動方式。斜坡軟起動的初始角可以根據(jù)情況進行設(shè)置,起動時間也可以由用戶調(diào)節(jié)。圖6是斜坡軟啟動alpha角計算的子模塊。“uini”是軟起動的初始角,“uincr”是軟起動的斜坡增長的斜率控制。
斜坡電壓軟起動是一種常見軟起動方式,這種起動方式的起動時間比直接起動長,起動電流比直接起動小,起動轉(zhuǎn)矩不高,容易實現(xiàn)。
2.2 限流起動
限流起動是在電動機的起動過程中限制其起動電流不超過某一設(shè)定值。這種起動方法主要用在輕載起動的降壓起動,其輸出電壓從零開始迅速增長,直到其輸出電流達到預先設(shè)定的電流限制,然后在保持輸出電流小于電流設(shè)定值的條件下逐漸升高電壓,直到額定電壓,從而使電動機轉(zhuǎn)速逐漸升高,直到額定轉(zhuǎn)速。圖7是基于Matlab/Simulink搭建的限流軟啟動alpha計算子模塊,alpha計算是在電流的閉環(huán)控制使用模糊控制器計算alpha角,調(diào)節(jié)電機兩端電壓。

限流軟起動采用電流反饋的閉環(huán)模糊控制調(diào)節(jié),可以快速、準確地觸發(fā)晶閘管,避免大電流的沖擊,很好地限制起動電流。
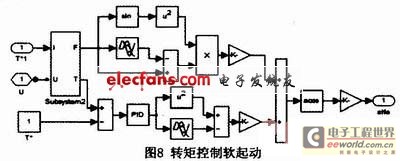
轉(zhuǎn)矩控制起動是控制電動機的起動轉(zhuǎn)矩由小到大線性上升,并根據(jù)起動轉(zhuǎn)矩變化計算晶閘管的導通角進而控制電機的輸入電壓,使電機的轉(zhuǎn)矩滿足電動機使用要求。圖8是轉(zhuǎn)矩控制軟起動alpha角計算子模塊。
轉(zhuǎn)矩控制軟起動的優(yōu)點是起動平滑、柔性好,對拖動系統(tǒng)有利,同時減少對電網(wǎng)的沖擊,是最優(yōu)的負載起動方式。
2.4 分級變頻軟起動
分級變頻(離散頻率法)就是使傳統(tǒng)軟起動器輸出電壓的頻率從一個較低的值開始,分級上升,最后達到50Hz。分級變頻雖然可以實現(xiàn)變頻,但不能使頻率連續(xù)地變化,只能使頻率分級變化,而且各級頻率都是50Hz的n分之一(即50Hz的分頻),實現(xiàn)較高起動轉(zhuǎn)矩。圖9是分級變頻軟起動導通角alpha的計算子模塊。在低頻起動過程中,為保持電機的主磁通不變,要相應(yīng)地降低定子電壓,通過計算得到電機在F/2、F/4、F/5、F/7的導通角alpha的大小,在頻率達到50Hz后,導通角緩慢減小到0,使電動機上的電壓達到額定電壓,完成軟起動。
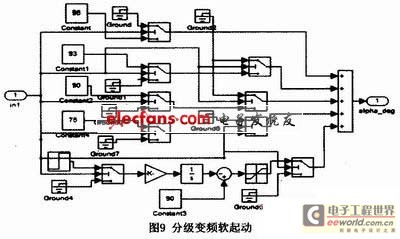
分級變頻起動能有效提高電動機起動轉(zhuǎn)矩,可使電動機在重負載的情況下平滑起動。
3 仿真結(jié)果分析
在matlab/simulink仿真環(huán)境中,通過對圖1中軟起動方式的選擇,對斜坡控制、限流控制、轉(zhuǎn)矩控制和分級變頻控制進行仿真。分別得到四種軟起動的定子有效電流、轉(zhuǎn)速和轉(zhuǎn)矩的波形圖。
電機參數(shù)為10kW、220V、50Hz,極對數(shù)為2,定、轉(zhuǎn)子端的標么值參數(shù)分別為:Rs=0.0401Ω;Rr=0.0377Ω;Ls=Lr=1.0349Ω。
通過對仿真結(jié)果的分析可以到處結(jié)論:斜坡起動是一種開環(huán)的起動控制方式,能夠降低電機的起動電流,起動轉(zhuǎn)矩不高,操作簡單;限流軟起動是采用電流的閉環(huán)控制,能夠很好地限制電機的起動電流,但是起動時間較長,起動轉(zhuǎn)矩不高;轉(zhuǎn)矩控制軟起動轉(zhuǎn)矩能夠平滑地上升,降低轉(zhuǎn)矩突變給拖動系統(tǒng)造成的影響,是很好的負載起動;分級變頻起動能夠限制電動機的起動電流,起動轉(zhuǎn)矩大,是一種有效的高轉(zhuǎn)矩起動方法,適用于大負載的電機起動。
4 結(jié)論
滑模軟起動器是綜合了多種軟起動方式的軟起動裝置,通過滑模控制對軟起動方式進行選擇,實現(xiàn)多種軟起動,擴大了軟起動裝置的應(yīng)用范圍,提高了軟起動裝置的實用性,具有很大實用價值。