
1 高度測量系統(tǒng)的設(shè)計
大氣壓力在數(shù)值上等于所在海拔高度往上直到大氣上界整個空氣柱的重量,因此理想情況下,大氣壓力與海拔高度具有一一對應(yīng)的關(guān)系。在海平面附近,海拔高度每升高100 m,氣壓下降大約0.7 kPa。由于空氣具有可壓縮性,大氣壓力與海拔高度具有非線性關(guān)系。
高度和氣壓之間的函數(shù)關(guān)系較為復(fù)雜。如果照搬氣壓公式來制作電路,電路將變得十分復(fù)雜,現(xiàn)實起來非常困難。因此,設(shè)計該高度計時,可以將高度按區(qū)段劃分,分別進行數(shù)據(jù)的解算。
1.1 氣壓高度計設(shè)計的理論基礎(chǔ)
氣壓與高程的關(guān)系模型:H=T0/L×(P/P0)∧(1/(N-1))(近似公式)。以標準海平面為基準:T0=288.15K;P0=101.325kPa;N=5.2558 8;L=-0.006 5℃/m,通過計算結(jié)果可見表1。從表中數(shù)據(jù)可以看出,傳感器的漂移等引起的誤差對高端和低端的影響是不同的。為提高測量精度,設(shè)計時要考慮這一點。根據(jù)氣壓公式可以得出0~6 000 m量程內(nèi)的壓力變化范圍在47.18~101.325 kPa。據(jù)此可確定硅壓阻式傳感器量程。為充分利用傳感器的精度,選擇硅壓阻式傳感器量程要盡量接近測量范圍。

1.2 高度計的硬件設(shè)計
硬件結(jié)構(gòu)由微型硅壓阻式傳感器、單片機、A/D轉(zhuǎn)換、精密參考電壓、顯示驅(qū)動模塊、串口通信模塊、電源模塊等幾部分組成。元器件選取主要考慮設(shè)計精度和體積功耗,并留有一定的余量。
1.2.1 單片機
數(shù)據(jù)處理要求體積小功耗低,內(nèi)部帶有16位ADC和溫度傳感器。此處選用C8051F353型單片機,是美國Silicon Labs公司最新推出的一款混合信號片上系統(tǒng)型單片機芯片,可以工作在-40~+85℃溫度范圍,28引腳LQFP封裝,帶有最大放大倍數(shù)128的可編程增益放大器(PGA)。非常適用于多路模擬數(shù)據(jù)采集系統(tǒng)。
1.2.2 壓阻式傳感器
氣壓傳感器在氣壓計中占據(jù)核心位置。設(shè)計時可根據(jù)測量精度、測量范圍、溫度補償、測量絕對氣壓值等幾個性能指標來選取氣壓傳感器。選用傳感器量程要盡量與測量的范圍相符,以利于同樣的精度條件下減小誤差。傳感器選用體積較小的飛思卡爾公司的MPX2100D型絕壓傳感器,量程為100~0 kPa。線性度為±0.25%FS。滿量程輸出為40 mV(10 V供電)。它用單個由離子注入工藝形成并經(jīng)激光修整的X型電阻代替一般用4個電阻構(gòu)成的惠斯登電橋,避免了由4個電阻的不匹配而引起的誤差。
1.2.3 ADC芯片
根據(jù)量程和分辨率選擇A/D轉(zhuǎn)換器位數(shù)和精度。ADC芯片的位數(shù)N根據(jù)公式N≥log2(1+Umax/Umin)計算(式中:Umax為ADC芯片的滿度輸入電壓;Umin為ADC芯片最小能分辨出的電壓),為達到1 m以上的氣壓高度分辨率,A/D轉(zhuǎn)換器的位數(shù)要在15位以上。為簡化電路,縮小體積,這里A/D轉(zhuǎn)換器采用C8051F353自帶的16位ADC0。參考電壓使用單片機內(nèi)部自帶的2.5 V基準。通過將寄存器ADCOMD中的ADOEN位置“1”和將寄存器ADCOCF中的ADOVREF位清“0”來使能內(nèi)部電壓基準。使用時應(yīng)在VREF和AGND之間接入0.1μF和4.7μF的旁路電容。
1.2.4 顯示通信電路
由于使用4個單個LED進行顯示的連線比較復(fù)雜,同時單片機的端口驅(qū)動能力也難以保證,此處選用專門的驅(qū)動芯片。顯示驅(qū)動選用可編程8位SPI串行LED接口的MAX7219。串口通信電路主要用來實現(xiàn)該系統(tǒng)與上位計算機的通信,利用C8051F353型單片機的UART串口總線通過SP3 232芯片的電平轉(zhuǎn)換與上位計算機進行通信。工作于9 600 b/s,1個起始位,8個數(shù)據(jù)位,1個停止位,奇校驗。
1.2.5 電源與抗干擾設(shè)計
使用了低壓差穩(wěn)壓器LM1117A分別為微處理器和為其余電路供電。采用了基準電壓源MAX6350來穩(wěn)定對壓力傳感器的供電,以保證傳感器輸出的穩(wěn)定性。將基準電壓分壓后作為C8051F353型單片機的電壓參考。PCB板設(shè)計時每個芯片有電源退耦電路。模擬數(shù)字分開布線。為了避免傳感器產(chǎn)生的信號在進入A/D采樣前發(fā)生失真并減少傳感器的功耗,在ADC的輸入端連接了濾波器,降低噪聲并作為緩沖器隔離前后級,避免其他電路對ADC采樣的影響。儀器采用干電池供電不存在電源或電網(wǎng)干擾問題。但現(xiàn)場使用不可避免地會受到自然放電干擾和其他電氣設(shè)備的放電干擾。為不增加過多的硬件屏蔽措施,設(shè)計采用軟件采用了采用了改進的平均值濾波算法。
1.3 高度計的軟件件設(shè)計
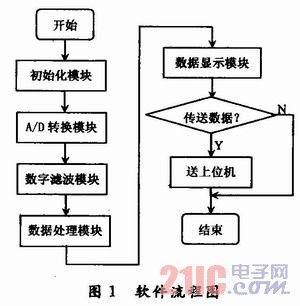
軟件設(shè)計流程如圖1所示,采用模塊化結(jié)構(gòu),方便調(diào)試。包括初始化子程序、采樣數(shù)據(jù)處理、A/D轉(zhuǎn)換子程序、壓力補償子程序、數(shù)據(jù)處理子程序、高度計算子程序、通信子程序、顯示子程序等部分組成。
雖然測量范圍內(nèi)指示空速是大氣動壓的單值函數(shù),但其函數(shù)關(guān)系式比較復(fù)雜,若由式(1)、(2)由單片機直接計算,要使用浮點運算,會占用較多的計算機資源。該設(shè)計選定線性插值方法來計算指示空速。用一個簡單易實現(xiàn)的線性函數(shù)代替原復(fù)雜函數(shù),即:y=yi+ki(x-xi)。式中:yi,xi,ki分別代表第i個插值點氣壓高度值、大氣靜壓值和插值線段的斜率。插值點的個數(shù)可由線性插值法的誤差公式確定:
![]()
式中:M=max(f"(x));δ為計算精度。根據(jù)系統(tǒng)要求的計算精度δ,求出步長h=xi+1-xi,得出曲線插值的分段段數(shù)n=60。預(yù)先計算各插值點相應(yīng)的氣壓高度值、大氣靜壓值和插值線段的斜率,把校正點的數(shù)據(jù)求出,按照一定的規(guī)律構(gòu)成表格存放在單片機的內(nèi)部ROM中。采集到的數(shù)據(jù),先與校正點的數(shù)據(jù)進行比較找到數(shù)據(jù)所在的分段,然后將該分段對應(yīng)的yi,xi,ki代入分段插值公式中計算,即可解算出氣壓高度值。這樣可在保證精度的前提下提高采樣頻率。
C8051F353單片機內(nèi)部設(shè)有溫度傳感器,溫度傳感器系統(tǒng)由兩個溫度特性不同的二極管和兩個恒流源組成。兩個通道通過ADC的模擬多路選擇器連接到ADC的輸入端。溫度傳感器系統(tǒng),工作在差分方式。本文利用C8051F353單片機內(nèi)部的溫度傳感器對溫度進行采樣,對傳感器的輸出進行修正,以進一步提高輸出精度。
根據(jù)壓阻式壓力傳感器原理,所測壓力大小P與傳感器輸出電壓U是線性關(guān)系。即兩個參數(shù)關(guān)系為:P=aU+b。由于傳感器的零位和靈敏度會隨溫度漂移,因此系數(shù)a,b也會隨溫度變化而變化,即系數(shù)a,b是溫度的函數(shù)。首先,通過多次采樣定標,由標準壓力源提供分組標準壓力,記錄一定溫度下傳感器的輸出電壓值,即多組(Pi,Ui),i=0,1,2,…,n,然后利用最小二乘法進行曲線擬合。為使總誤差![]() 最小,可用Q對a,b求偏導(dǎo)數(shù),令這兩個偏導(dǎo)數(shù)為零,則求解方程得出一定溫度對應(yīng)的系數(shù)(at,bt)。其中t=-10℃,0℃,10℃,…,50℃。壓力大小P與輸出電壓U關(guān)系為:
最小,可用Q對a,b求偏導(dǎo)數(shù),令這兩個偏導(dǎo)數(shù)為零,則求解方程得出一定溫度對應(yīng)的系數(shù)(at,bt)。其中t=-10℃,0℃,10℃,…,50℃。壓力大小P與輸出電壓U關(guān)系為:
![]()
然后再通過牛頓插值法,根據(jù)溫度傳感器提供的溫度參數(shù)t,對壓力P與電壓U關(guān)系式進行插值修正。由插值多項式:
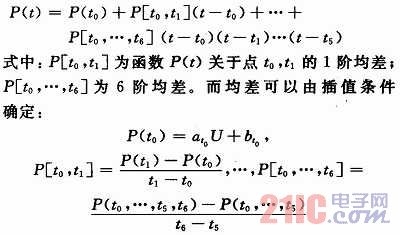
根據(jù)一定溫度修正后壓力P與電壓U的關(guān)系式,可以由所測電壓U計算出實際壓力值P。
2 實驗結(jié)果和誤差分析
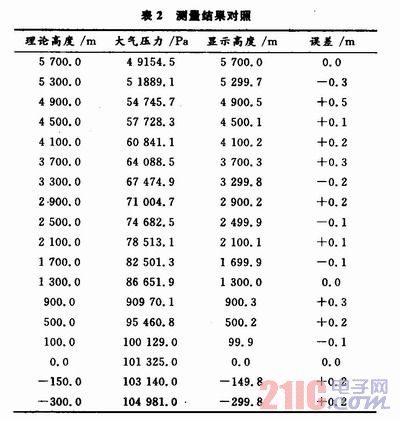
由于傳感器的最大誤差在測量值的最高端,如果此段的誤差滿足設(shè)計要求,其他分段即可滿足要求。結(jié)果如表2所示。由于仿真階段排除了可能出現(xiàn)的軟硬件錯誤,在后繼的PCB制版及總體調(diào)試中非常順利。實際電路中由于存在電磁干擾和溫度漂移,整體誤差比仿真略大,對于誤差最大來源的傳感器,已對其進行了單獨的校正和補償,最終該測量系統(tǒng)在-300~+6 000 m的高度范圍內(nèi)誤差小于1m。
對于海拔高度,系統(tǒng)測量誤差主要來自傳感器、放大電路和轉(zhuǎn)換器三項誤差,用均方根法可表示為:
![]()
要降低系統(tǒng)誤差,就要分別降低這三項誤差。其中放大器電路的誤差,主要由放大電路中所用電阻的精度、集成運算放大器的性能和電路的結(jié)構(gòu)決定。設(shè)計和調(diào)校好的放大電路可以使該項誤差很小,基本可以忽略。ADC誤差主要是其積分非線性誤差、微分非線性誤差、偏移誤差、滿量程誤差和偏移溫度系數(shù)誤差。現(xiàn)代放大電路的誤差和ADC誤差遠小于傳感器的誤差。所以系統(tǒng)的誤差主要決定于傳感器的誤差。如要進一步提高測量精度,可以換用更高精度的傳感器。
3 結(jié)語
該高度計避免了機械部件帶來的機械誤差,充分利用了C8051F353單片機內(nèi)部資源。具有體積小、精度高和智能化誤差補償?shù)忍攸c,特別適合在小型飛行器上使用。具有很好的實用性,適用于需要實時高度信息的場合,可以完成載體上多種高度參數(shù)的實時測量和顯示,內(nèi)有串口通信模塊,不僅可顯示本機測量值,也可通過串口發(fā)送給大氣數(shù)據(jù)計算機,實現(xiàn)數(shù)據(jù)的記錄和監(jiān)測。有廣泛的應(yīng)用前景。