
我國(guó)西北地區(qū)國(guó)土面積遼闊,太陽(yáng)能和風(fēng)能資源非常豐富,其中太陽(yáng)能年均輻射強(qiáng)度為6000~8400MJ/m2,年均太陽(yáng)能光照時(shí)間為3000~3200h;風(fēng)力平均為5~6級(jí)。西北邊遠(yuǎn)地區(qū)經(jīng)濟(jì)不發(fā)達(dá),且住戶非常分散,若為這些用戶提供市電,則成本太高,因而,如何合理利用現(xiàn)有的資源——太陽(yáng)能和風(fēng)能就成為解決這些問(wèn)題的有效途徑。
2 風(fēng)、光互補(bǔ)型戶用電源系統(tǒng)
系統(tǒng)的結(jié)構(gòu)框圖如圖1所示。
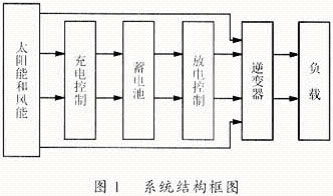
本系統(tǒng)既可以利用太陽(yáng)能和風(fēng)能對(duì)蓄電池充電,將自然能轉(zhuǎn)化為化學(xué)能儲(chǔ)藏在蓄電池中,然后再將化學(xué)能逆變成220V交流電供給用戶使用;又可以直接將太陽(yáng)能和風(fēng)能逆變?yōu)?20V交流電供給用戶使用。
3 系統(tǒng)的硬件電路
本系統(tǒng)的硬件電路主要包括主電路、隔離與驅(qū)動(dòng)電路和控制電路等。
3.1 主電路
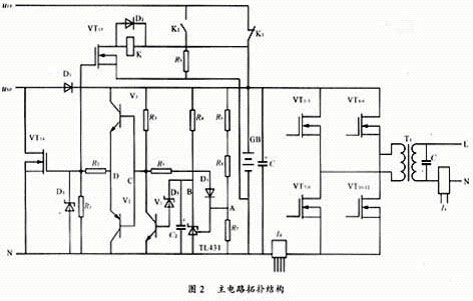
主電路的拓?fù)浣Y(jié)構(gòu)如圖2所示。由圖2可知主電路主要包括蓄電池的過(guò)充保護(hù)電路和逆變電路。圖中uFP表示經(jīng)過(guò)整流后的風(fēng)機(jī)輸出電壓,uSP表示太陽(yáng)電池輸出電壓,K為電磁繼電器,GB為額定電壓24V的蓄電池組。
3.1.1 過(guò)充保護(hù)電路的工作原理
當(dāng)蓄電池的電壓過(guò)高時(shí),A點(diǎn)電壓就會(huì)大于TL431的基準(zhǔn)電壓值Uref(=2.5V)從而使TL431導(dǎo)通,B點(diǎn)被鉗為低電平,V1截止,C點(diǎn)為高電平,V3導(dǎo)通,V2截止,D點(diǎn)為高電平,此時(shí)VT14和VT15均導(dǎo)通,繼電器K動(dòng)作。根據(jù)太陽(yáng)能電池和風(fēng)機(jī)的特性,太陽(yáng)能電池的輸出電壓被直接短路,風(fēng)機(jī)的輸出電壓通過(guò)大功率卸載電阻R9卸放掉;相反,當(dāng)蓄電池的電壓過(guò)低時(shí),VT14和VT15均截止,太陽(yáng)能電池和風(fēng)機(jī)的輸出電壓就對(duì)蓄電池充電。
3.1.2 逆變電路
采用單相全橋逆變電路,用功率MOSFET作為逆變電路的開(kāi)關(guān)器件。功率MOSFET是一種多子導(dǎo)電的單極性電壓控制型器件,具有開(kāi)關(guān)動(dòng)作快、輸入阻抗大、驅(qū)動(dòng)功率小、無(wú)二次擊穿、驅(qū)動(dòng)電路簡(jiǎn)單、安全工作區(qū)大等優(yōu)點(diǎn),特別是由于具有正溫度系數(shù),可以自動(dòng)均衡電流,所以在輸入電壓低、工作電流大的逆變電源系統(tǒng)中可以將幾只功率MOSFET并聯(lián)以提高電流容量。在本系統(tǒng)中,將三只功率MOSFET并聯(lián),使電流容量增大到三倍。逆變器將整流后的直流電壓轉(zhuǎn)換成特定頻率的SPWM波,再經(jīng)過(guò)電感和電容濾波將其轉(zhuǎn)換為220V的標(biāo)準(zhǔn)正弦波電壓,其中電感用變壓器次級(jí)的漏感代替,采用這種方式使系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,噪音低,并且能有效地抑制波形中的高次諧波成分。
SPWM控制方式預(yù)先將0~360°的正弦值制成表格存于EPROM中。由于開(kāi)關(guān)驅(qū)動(dòng)信號(hào)是利用正弦波參考信號(hào)與一個(gè)三角載波信號(hào)互相比較而生成的,常分為單極性和雙極性兩種情況。在開(kāi)關(guān)頻率相同的情況下,由于雙極性SPWM控制產(chǎn)生的正弦波,其諧波含量和開(kāi)關(guān)損耗均大于單極性,故本系統(tǒng)采用的是單極性SPWM控制。
3.2 系統(tǒng)的隔離和驅(qū)動(dòng)模塊
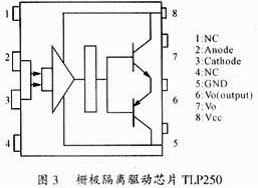
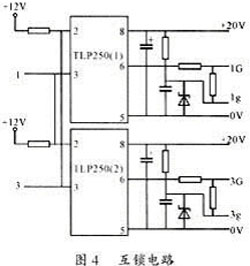
隔離和驅(qū)動(dòng)電路是將Intel80C196MC芯片輸出的SPWM信號(hào)加以隔離、放大,形成驅(qū)動(dòng)各功率器件開(kāi)關(guān)動(dòng)作信號(hào)的電路。本系統(tǒng)采用東芝公司生產(chǎn)的專用于驅(qū)動(dòng)功率MOSFET和IGBT的柵極隔離驅(qū)動(dòng)芯片TLP250,其結(jié)構(gòu)框圖如圖3所示。它是一光電耦合器件,但又不同于普通的光耦,由于其輸出級(jí)是經(jīng)推挽電路放大輸出的,所以它不但能使原副邊隔離,而且具有驅(qū)動(dòng)能力,特別適合于驅(qū)動(dòng)中等功率的MOSFET和IGBT。同時(shí),在工程應(yīng)用中為了從硬件上可靠防止同一橋臂上的兩個(gè)功率器件上下直通,故將驅(qū)動(dòng)同一橋臂功率器件的兩個(gè)TLP250的腳2和腳3互相對(duì)接,形成互鎖電路,從而有效地防止了橋臂功率器件的直通故障。具體電路見(jiàn)圖4。
3.3 控制電路及控制芯片
控制電路主要通過(guò)對(duì)直流電流、直流電壓、交流電流、交流電壓等信號(hào)的檢測(cè),實(shí)現(xiàn)系統(tǒng)的過(guò)壓、欠壓、過(guò)流、過(guò)放電、過(guò)熱和反時(shí)限等保護(hù)功能。控制芯片采用Intel80C196MC微處理器。
Intel80C196MC是Intel公司于1992年推出的真正的16位單片機(jī),由于此片內(nèi)集成了一個(gè)頗具特色的波形發(fā)生器(WG)單元,從而大大簡(jiǎn)化了用于產(chǎn)生SPWM波形的軟件和外部硬件電路。波形發(fā)生器有3個(gè)獨(dú)立的模塊,每個(gè)模塊均包含一個(gè)數(shù)值比較器、比較寄存器、比較緩沖器、無(wú)信號(hào)時(shí)間發(fā)生器和一對(duì)可編程輸出驅(qū)動(dòng)通道。三相波形有共同的載波頻率和共同的死區(qū)時(shí)間,可編程為三角波調(diào)制方式或鋸齒波調(diào)制方式,一旦啟動(dòng)后只要求在改變PWM占空比時(shí)加以干預(yù),其余時(shí)間均不占用CPU。
波形發(fā)生器由時(shí)基發(fā)生器、相驅(qū)動(dòng)通道和控制保護(hù)電路組成。
時(shí)基發(fā)生器為PWM波形建立載波周期。80C196MC通過(guò)從重裝載寄存器(WG-RELOAD)中讀入數(shù)據(jù)來(lái)確定載波周期的長(zhǎng)短,因此用戶可以通過(guò)在程序中改變重裝載寄存器的值來(lái)改變載波周期值。
相驅(qū)動(dòng)通道確定PWM波形的占空比。每相驅(qū)動(dòng)通道都有各自的相比較緩沖寄存器(WG-COMPX),一般情況下,PWM波形的占空比由工作方式、重裝載寄存器和相比較緩沖寄存器這三個(gè)方面來(lái)決定。
控制電路包括控制寄存器(WG-CONTROL)和輸出寄存器(WG-OUT)。同時(shí),CPU內(nèi)部還有一個(gè)保護(hù)電路用于監(jiān)測(cè)EXTINT輸入端,以便對(duì)異常情況進(jìn)行處理。
另外,無(wú)信號(hào)時(shí)間發(fā)生器電路是波形發(fā)生器的一個(gè)非常重要的功能,可以用來(lái)防止一對(duì)互補(bǔ)的PWM信號(hào)同時(shí)有效,從而避免了同一橋臂的上下兩只功率管直通;同時(shí),用戶可以通過(guò)軟件向WG-CON寄存器的低10位裝入一個(gè)數(shù)來(lái)任意設(shè)置無(wú)信號(hào)時(shí)間。
4 系統(tǒng)控制原理
系統(tǒng)控制方式采用電流反饋、電壓前饋和電壓反饋相結(jié)合的復(fù)合控制方式,電流反饋、電壓反饋采用數(shù)字PI調(diào)節(jié)器,以實(shí)現(xiàn)系統(tǒng)的穩(wěn)態(tài)輸出無(wú)靜差;PI控制是將采樣時(shí)刻偏差的比例(P)、積分(I)通過(guò)線性組合構(gòu)成控制量,對(duì)被控對(duì)象進(jìn)行控制,PI控制器的傳遞函數(shù)為:
![]()
式中:Kp——比例系數(shù);TI——積分時(shí)間常數(shù)。
電流反饋在WG中斷時(shí)完成,由于電流調(diào)節(jié)時(shí)間極短,所以大大提高了系統(tǒng)的動(dòng)態(tài)響應(yīng)速度并有效抑制了系統(tǒng)的超調(diào)。其中電流調(diào)節(jié)時(shí)間t大約如下:
t=(20/196)×5×8ms≈4ms
由此可見(jiàn),系統(tǒng)輸出電壓在不到1/4基波周期內(nèi)就可以恢復(fù)正常。
5 系統(tǒng)軟件設(shè)計(jì)
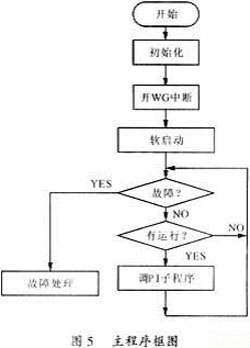
系統(tǒng)軟件部分主要包括主程序、WG中斷程序、PI調(diào)節(jié)子程序等。主程序的任務(wù)主要是初始化、故障判斷、運(yùn)行信號(hào)判斷及等待中斷等,主程序框圖如圖5所示。
6 結(jié)語(yǔ)
根據(jù)上述控制思想設(shè)計(jì)的1kW樣機(jī),經(jīng)過(guò)檢驗(yàn),整機(jī)效率≥85%,輸出電壓為220(1±4%)V,輸出電壓頻率為50(1±0.5%)Hz,并且系統(tǒng)具有過(guò)壓、欠壓、過(guò)熱、過(guò)流、短路和反時(shí)限等完善的保護(hù)功能。空載時(shí)的電壓波形如圖6所示。目前,該系統(tǒng)已在開(kāi)封市黃河河務(wù)局運(yùn)行近半年,情況良好。
參考文獻(xiàn)
1]京特,萊納等著.余世杰,何慧若譯.太陽(yáng)能的光伏利用[M].合肥:合肥工業(yè)大學(xué),1991.
2]孫涵芳主編.Intel16位單片機(jī)[M].北京航空航天大學(xué)出版社,1995.
3]黃俊,王兆安主編.電力電子變流技術(shù)[M].機(jī)械工業(yè)出版社,1992.
4]陶永華主編.新型PID調(diào)節(jié)器[M].機(jī)械工業(yè)出版社,2000.
5]張占松,蔡宣三編著.開(kāi)關(guān)電源的原理與設(shè)計(jì)[M].電子工業(yè)出版社,1999.
6]陳伯時(shí)主編.電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].機(jī)械工業(yè)出版社,1997.