
摘要:提出了一種基于單片機(jī)的遙控開關(guān)系統(tǒng)。該系統(tǒng)使用AT89C2051單片機(jī)作為控制芯片,制作一個(gè)遙控器。鍵盤采用行列式操作,遙控器發(fā)射器采用紅外線脈沖個(gè)數(shù)編碼,另一個(gè)單片機(jī)AT89C52控制系統(tǒng)能被遙控操作,通過單片機(jī)軟件解碼實(shí)現(xiàn)對(duì)一個(gè)電燈的調(diào)光,以及對(duì)繼電器的控制功能。
1 引言
隨著電子技術(shù)的飛速發(fā)展,新型大規(guī)模遙控集成電路的不斷出現(xiàn),遙控技術(shù)有了日新月異的發(fā)展。遙控裝置的中心控制部件已從早期的分立元件、集成電路逐步發(fā)展到現(xiàn)在的單片微型計(jì)算機(jī),智能化程度大大提高。近年來,遙控技術(shù)在工業(yè)生產(chǎn)、家用電器、安全保衛(wèi)以及人們的日常生活中使用越來越廣泛。
本論文是基于單片機(jī)設(shè)計(jì)了一個(gè)智能化的遙控開關(guān)系統(tǒng)。該系統(tǒng)用AT89C2051單片機(jī)作為控制芯片,制作一個(gè)遙控器,鍵盤采用行列式操作,按鍵中斷掃描方式提高了CPU效率。遙控器發(fā)射器采用紅外線脈沖個(gè)數(shù)編碼,根據(jù)脈沖個(gè)數(shù)來確定是哪個(gè)按鍵按下,并發(fā)射相應(yīng)的信號(hào)來控制電燈調(diào)光,無鍵按下時(shí)處于低功耗空閑方式狀態(tài)。另一個(gè)單片機(jī)控制系統(tǒng)能被遙控操作,通過軟件解碼實(shí)現(xiàn)對(duì)一個(gè)電燈的調(diào)光,以及對(duì)繼電器的控制功能。
2 系統(tǒng)的結(jié)構(gòu)組成和工作原理
用單片機(jī)制作一個(gè)紅外遙控器,可以分別控制8個(gè)控制繼電器開關(guān),和一個(gè)電燈開關(guān),并且可以對(duì)電燈進(jìn)行亮度的調(diào)光控制。
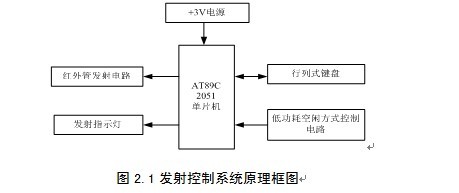
紅外發(fā)射部分結(jié)構(gòu)圖如下圖2.1所示
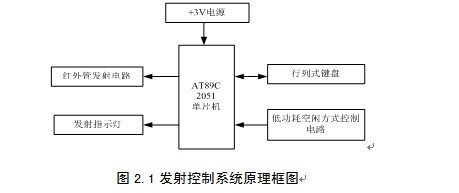
當(dāng)按下遙控按鈕時(shí),單片機(jī)產(chǎn)生相應(yīng)的控制脈沖,由紅外發(fā)光二極管發(fā)射出去。
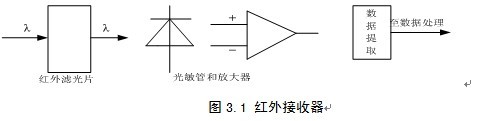
紅外接收部分結(jié)構(gòu)如下圖2.2所示:
采用紅外遙控不影響周邊環(huán)境的、不干擾其他電器設(shè)備。由于其無法穿透墻壁,故不同房間的家用電器可使用通用的遙控器而不會(huì)產(chǎn)生相互干擾;電路調(diào)試簡(jiǎn)單,只要按給定電路連接無誤,一般不需任何調(diào)試即可投入工作;編解碼容易,適合進(jìn)行多路遙控。
3 硬件電路設(shè)計(jì)
3.1 遙控發(fā)射器電路設(shè)計(jì)
電路主要由AT89C2051單片機(jī)、行列式操作鍵盤、低功耗空閑方式控制電路、紅外發(fā)射電路電源等部分組成。
遙控電路的主芯片采用美國ATMEL公司的AT89C2051Flash單片機(jī)。它是一個(gè)低電壓,高性能CMOS8位單片機(jī),片內(nèi)含2KB的可反復(fù)擦寫的只讀Flash程序存儲(chǔ)器和128字節(jié)的隨機(jī)存取收據(jù)(RAM);2.7~6V的電源使用電壓、兩個(gè)16位定時(shí)器∕計(jì)數(shù)器;6個(gè)中斷源、15條I∕O引線;1個(gè)精密模擬比較器以及片內(nèi)振蕩器和時(shí)鐘電路;直接LED驅(qū)動(dòng)輸出以及空閑和掉電方式等功能。遙控器采用兩節(jié)1.5V電池串聯(lián)提供3V電源供電,在遙控系統(tǒng)設(shè)計(jì)中,片內(nèi)模擬比較器接口只是作普通I∕O運(yùn)用。
行列式操作鍵盤又稱為矩陣式鍵盤。用I∕O線組成行、列結(jié)構(gòu),按鍵設(shè)置在行列的交點(diǎn)上,行列線分別連接到按鍵開關(guān)的兩端,鍵盤中有無按鍵按下是由列線送入掃描字、行線讀入行線狀態(tài)來判斷的。為了提高CPU效率,同時(shí)也為了節(jié)約電池電源能量,遙控器采用按鍵中斷掃描方式。無鍵按下時(shí),單片機(jī)處于低耗空閑待機(jī)方式,有鍵按下時(shí)觸發(fā)外部中斷實(shí)現(xiàn)查鍵及執(zhí)行鍵功能程序。
AT89C205l的CPU有2種節(jié)電工作方式,即空閑方式和掉電方式,遙控器采用空閑節(jié)電工作方式。當(dāng)CPU執(zhí)行完置IDL=1(PCON.0=1)指令后,系統(tǒng)進(jìn)入空閑工作方式,這時(shí)內(nèi)部時(shí)鐘不向CPU 提供,而只供給中斷、串行口、定時(shí)器部分。遙控器退出低功耗空閑方式電路由IN4148二極管組成“與”門實(shí)現(xiàn)。當(dāng)有鍵按下時(shí),由“與”門觸發(fā)外部中斷1 發(fā)生中斷,單片機(jī)退出空閑工作方式,進(jìn)入鍵盤和紅外發(fā)射程序,結(jié)束后又進(jìn)入低功耗空閑方式待機(jī)。在使用過程中單片機(jī)基本上處于空閑工作方式,功耗相當(dāng)?shù)? 從而為使用電池電源提供了保障。
紅外線發(fā)射和指示燈電路利用遙控器信息碼由AT89C2051單片機(jī)的定時(shí)器1調(diào)制成38.5kHz紅外線載波信號(hào),由P3.5口輸出,經(jīng)過三極管 9013放大,由紅外線發(fā)射管發(fā)送。電阻R1的大小可以改變發(fā)射距離,按鍵的操作指示燈使用一個(gè)LED發(fā)光二極管。定時(shí)器1按照方式2工作,即設(shè)置自動(dòng)8 位重裝模式。在用作定時(shí)器時(shí),在每個(gè)機(jī)器周期計(jì)算器加1,所以可以把它看成累加機(jī)器周期,1個(gè)機(jī)器周期包括12個(gè)振蕩周期,則計(jì)數(shù)頻率為振蕩頻率的十二分之一。當(dāng)M1M0為10時(shí),定時(shí)器∕計(jì)數(shù)器工作于方式2。在此方式下,設(shè)置了一個(gè)8位的計(jì)數(shù)器,并自動(dòng)恢復(fù)初值的功能,以T1為例,將TL1作為計(jì)數(shù)器,將TH1作為寄存器使用,存放計(jì)數(shù)初值。當(dāng)TL1作增1計(jì)數(shù)至溢出時(shí),除了把溢出標(biāo)志位TF1置1外,同時(shí)還將TH1中的計(jì)數(shù)初值送入TL1中,使TL1 又重新從初值開始計(jì)數(shù)。而TH1中的計(jì)數(shù)初值由軟件編程置入,在常數(shù)重裝入的過程中,TH1保持不變。在方式2中,T0和T1的操作功能完全相同,可自由選擇使用。
3.2 遙控接收器電路設(shè)計(jì)
接收控制系統(tǒng)主要由AT89C52單片機(jī)、電源電路、紅外接收電路、50Hz交流過零檢測(cè)電路、電燈調(diào)光控制電路、控制繼電器電路等部分組成。
單片機(jī)AT89C52有40個(gè)引腳,32個(gè)外部雙向輸入∕輸出(I∕O)端口,同時(shí)內(nèi)含2個(gè)外中斷口,3個(gè)16位定時(shí)器∕計(jì)數(shù)器,6個(gè)中斷源、低功耗空閑和掉電方式,2個(gè)全雙工串行通信口,2個(gè)讀寫口線,AT89C52可以按照常規(guī)方法進(jìn)行編程,也可以在線編程。其將通用的微機(jī)處理器和Flash存儲(chǔ)器結(jié)合在一起,特別是可以反復(fù)擦寫的Flash存儲(chǔ)器可有效地降低開發(fā)成本。控制系統(tǒng)采用5V電源電壓,外接12MHz晶振。
電源電路由橋式整流、電容濾波、7805穩(wěn)壓器及電源指示燈組成。交流電經(jīng)過橋式整流變成直流電,再經(jīng)過電容濾波,7805集成穩(wěn)壓器穩(wěn)壓成為穩(wěn)定的+5V電源,用一個(gè)發(fā)光二極管指示燈指示電源狀態(tài)。
紅外遙控接收器集成了模塊化,一般為三個(gè)引腳,輸出為檢波整形過的方波信號(hào)。紅外接收電路如圖3.1所示,接收器前端紅外濾光片去除可見光使紅外光通過。監(jiān)測(cè)器紅外光敏二極管,使器件構(gòu)成最大受光區(qū)。在放大器端增加電濾波,消除低頻干擾和高頻干擾。數(shù)據(jù)檢測(cè)一般用峰值監(jiān)測(cè)器,通用信號(hào)比較器電路,輸出新電平去處理器。
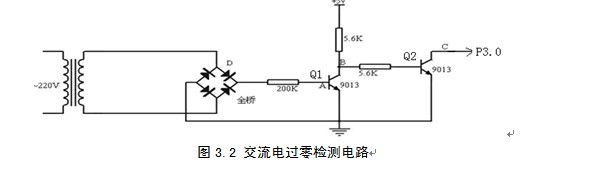
交流電過零檢測(cè)電路如圖3.2所示。過零檢測(cè)電路主要由兩個(gè)NPN型三極管組成,Q1的基極過一200K電阻進(jìn)行限流,電阻另一端為被檢測(cè)端,經(jīng)過全橋整流后為全波,一周期內(nèi)可以觸發(fā)兩次。被檢測(cè)端為經(jīng)過變壓器后整流得到的,此處電源主要供給AT89C52用,電路設(shè)計(jì)中僅有輸入和輸出端的電解電容濾波,考慮高頻雜波最好加入104/50V的鉭電容而使得電源更干凈,更好的防止干擾。在橋后串一二極管是為防止電源反接,一般在CPU電路板上。
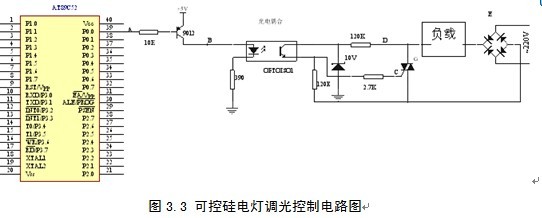
可控硅電燈調(diào)光控制電路設(shè)計(jì)原理圖如圖3.3所示。電燈調(diào)光是由可控硅的導(dǎo)通角控制的。AT89C52產(chǎn)生可控硅控制的移相脈沖,移相角的改變實(shí)現(xiàn)導(dǎo)通角的改變,即當(dāng)移相角較大是,可控硅的導(dǎo)通角較小,分布在電燈上的電壓較低,電等較暗;當(dāng)移相角較小時(shí),可控硅的導(dǎo)通角較大,分布在電燈上的電壓較高,電燈很亮;當(dāng)導(dǎo)通角不為0時(shí),電燈即可發(fā)光;當(dāng)導(dǎo)通角為0時(shí),電燈熄滅。當(dāng)AT89C52的P0.0位為低電平時(shí),9012三極管導(dǎo)通,三極管電極電流驅(qū)動(dòng)光電耦合器導(dǎo)通,使可控硅的G極產(chǎn)生脈沖信號(hào)觸發(fā)可控硅導(dǎo)通;當(dāng)AT89C52的P0.0位為高電平時(shí),9012三極管截止,則光電耦合器和可控硅都處于截止?fàn)顟B(tài)。
本設(shè)計(jì)有八路控制繼電器電路,在紅外接收原理圖上只畫出一路控制繼電器電路。圖3.4為HK4100F繼電器驅(qū)動(dòng)電路原理圖,三極管Q5的基極B接到 AT89C52單片機(jī)的P0.7口,三極管的發(fā)射極E接到繼電器線圈的一端,線圈的另一端接到+5V電源VCC上;繼電器線圈兩端并接一個(gè)二極管 IN4148,用于吸收釋放繼電器線圈斷電時(shí)產(chǎn)生的反向電動(dòng)勢(shì),防止反向電勢(shì)擊穿三極管Q5及干擾其他電路;R14和發(fā)光二極管LED9組成一個(gè)繼電器狀態(tài)指示電路,當(dāng)繼電器吸合的時(shí)候,LED9點(diǎn)亮,這樣就可以直觀的看到繼電器狀態(tài)了
4.1 遙控發(fā)射器的程序設(shè)計(jì)
4.1.1 初始化程序和主程序
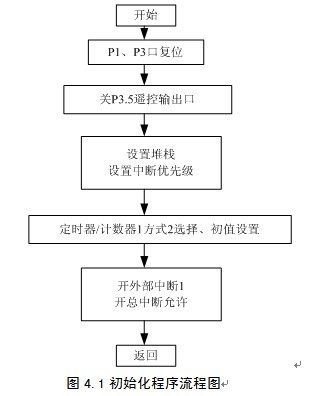
初始化程序流程圖如4.1所示。初始化程序主要是設(shè)置P1口和P3口為高電平狀態(tài)復(fù)位,關(guān)P3.5口遙控輸出,設(shè)置堆棧指針SP為#70H,關(guān)閉總中斷源,設(shè)置中斷優(yōu)先級(jí)IP,選擇定時(shí)器∕計(jì)數(shù)器1和設(shè)置工作方式為2的自動(dòng)8位重裝載模式。方式2是8位定時(shí)器/計(jì)數(shù)器,晶體振蕩器頻率為 12MHZ,則機(jī)器周期為f/12=12/12=1μs。計(jì)數(shù)功能計(jì)數(shù)初值X=28—計(jì)數(shù)值(計(jì)數(shù)值=T×f/12)。
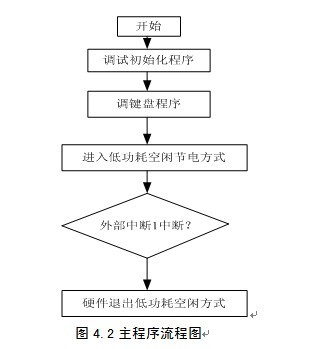
主程序流程圖如4.2所示。主程序部分首先調(diào)用初始化程序,再進(jìn)入主程序循環(huán)狀態(tài)。在循環(huán)中主要有兩個(gè)任務(wù),即調(diào)用鍵盤程序和進(jìn)入低功耗空閑待機(jī)方式。系統(tǒng)完成鍵盤查詢程序后即進(jìn)入空閑節(jié)點(diǎn)方式,直到外部中斷1中斷或硬件復(fù)位而退出,CPU再次轉(zhuǎn)向循環(huán)部
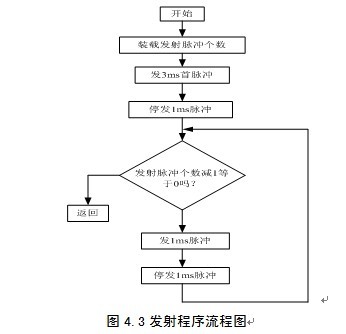
在發(fā)射程序中,首先要裝入發(fā)射脈沖個(gè)數(shù),第一個(gè)碼間隔即起始碼為3ms時(shí),開高頻定時(shí)中斷調(diào)制(P3.7端口設(shè)為高電平)。然后設(shè)置軟件陷阱,提高單片機(jī)的可靠性,以免出現(xiàn)死機(jī)現(xiàn)象,在進(jìn)行循環(huán)指令,第一個(gè)碼間隔3ms完成既R0為0時(shí)碼距間隔為1ms,如果之后脈沖個(gè)數(shù)為零,這時(shí)取反,關(guān)高頻中斷調(diào)制即 P3.7為低電頻,系統(tǒng)退出發(fā)射程序。如果脈沖個(gè)數(shù)還有則再循環(huán)發(fā)射。P3.7端口取反為低電頻時(shí)工作指示燈開,高電頻時(shí)指示燈關(guān)。在程序中調(diào)用 500ms的延時(shí)程序是確保遙控器發(fā)射的準(zhǔn)確性。發(fā)射程序流程圖如下4.3所示。
4.2 遙控接收器的程序設(shè)計(jì)
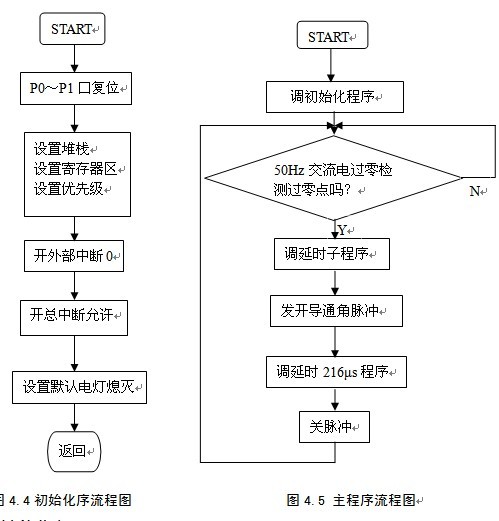
初始化程序流程圖如圖4.4所示。初始化程序部分主要使系統(tǒng)進(jìn)入復(fù)位初始化的狀態(tài)值。具體是:P1、P2、P3口置位設(shè)置為高電平狀態(tài),使之成為輸入口。選擇工作寄存器區(qū),設(shè)置堆棧指針SP,設(shè)置中斷優(yōu)先級(jí)IP,開外部中斷0和定時(shí)器1,開總中斷允許。設(shè)置導(dǎo)通角為零的延時(shí)值,并設(shè)置電燈默認(rèn)熄滅的標(biāo)志位。
主程序部分首先調(diào)用初始化程序,再進(jìn)入主程序循環(huán)狀態(tài)。在循環(huán)中主要任務(wù)是50Hz交流電過零檢測(cè),如果是過零則調(diào)用延時(shí)子程序,發(fā)開導(dǎo)通角脈沖,調(diào)用延時(shí)256μs程序,然后關(guān)脈沖并返回過零檢測(cè)狀態(tài)。圖4.5為主程序流程圖。
5 性能指標(biāo)
調(diào)試后系統(tǒng)性能指標(biāo)測(cè)試如下:
1最大遙控距離:10m;
2最大接收角:90度;
3遙控器發(fā)射時(shí)工作電流:8mA;
4遙控器靜態(tài)電流:0.6mA;
5調(diào)光控制系統(tǒng)最大輸出電壓(5檔調(diào)光):交流200V;
6調(diào)光控制系統(tǒng)最慢輸出電壓(1檔調(diào)光):交流50V;
7調(diào)光控制系統(tǒng)停止輸出電壓:0V;
8繼電器正常工作。
采用紅外遙控方式時(shí),距離、角度等使用效果受一頂?shù)南拗疲绻捎谜{(diào)頻或調(diào)副發(fā)射接受,則發(fā)射距離會(huì)更遠(yuǎn),接受將不受角度的影響。本單片機(jī)遙控編碼及解碼方案適合一切需要應(yīng)用到遙控的電器系統(tǒng),是自行設(shè)計(jì)帶遙控功能的控制系統(tǒng)的首選理想方案。
6 結(jié)束語
隨著遙控技術(shù)的使用越來越廣泛,智能化控制已成為一種趨勢(shì)。本設(shè)計(jì)提出了一種基于單片機(jī)的遙控開關(guān)系統(tǒng)。通過對(duì)樣機(jī)的測(cè)試結(jié)果表明,本系統(tǒng)采用單片機(jī)進(jìn)行遙控系統(tǒng)的應(yīng)用設(shè)計(jì),具有編程靈活多樣,操作碼個(gè)數(shù)可隨意設(shè)定等優(yōu)點(diǎn)。一般設(shè)備系統(tǒng)采用專用的遙控編碼及解碼集成電路。此方案具有制作簡(jiǎn)單,容易等特點(diǎn),但由于功能鍵數(shù)及功能受到特定的限制,只適合用于某一專用電器產(chǎn)品的應(yīng)用,應(yīng)用范圍受到限制。而本系統(tǒng)消除了此問題,智能化大大提高。通過對(duì)樣機(jī)的調(diào)試運(yùn)行,節(jié)能效果很好,具有極其廣泛的應(yīng)用價(jià)值和應(yīng)用前景。
參考文獻(xiàn):
[1]梁延貴,遙控電路可控硅觸發(fā)電路語音電路分冊(cè)北京:科學(xué)技術(shù)文獻(xiàn)出版社,2002,60-90
[2]余永權(quán),ATMEL89系列單片機(jī)應(yīng)用技術(shù).北京:北京航空航天大學(xué)出版社,2002,90-150
[3]張玉梅,曲仕茹,白樹林.基于單片機(jī)的紅外遙控開關(guān)控制器.西安.西安工程科技學(xué)院學(xué)報(bào),2005年12月.第19卷.第4期,1-5
[4]楊穎,單片機(jī)紅外遙控器設(shè)計(jì).江蘇.電子與封裝,2005年11月.第5卷.第1l期,1-4
[5] Forsyth, A.J..Extended fundamental frequency analysis of the LCC resonant converter. Power Electronics [J], 2003,6(18): 1286- 1292.
[6]Doolla,S.. A GUI based simulation of power electronic converters and reactive power compensators using MATLAB/SIMULINK. 2004 International Conference on Power System Technology.2004, 2(21-24): 1710-1715.