
1 引言
追尾碰撞是目前我國(guó)高速公路各類事故中較多的一類事故,占事故總數(shù)的33%左右。根據(jù)對(duì)沈大、合寧、廣深、西臨等高速公路交通事故的統(tǒng)計(jì)分析,交通事故類型如表1所示。

有關(guān)研究表明,若駕駛員能夠提早1 秒意識(shí)到有事故危險(xiǎn)并采取相應(yīng)的措施,則90%的追尾事故和60%的正面碰撞事故都可以避免。美、英、德、日的不少汽車公司(如德國(guó)的奔馳、日本的三菱、馬自達(dá)、日產(chǎn)、本田及富土重工等公司)都開展了高速公路車載毫米波雷達(dá)防追尾碰撞預(yù)警系統(tǒng)的研究。
我國(guó)主要有清華大學(xué)、浙江大學(xué)、上海交通大學(xué)、吉林大學(xué)等高校和部分研究所在進(jìn)行車輛主動(dòng)防撞報(bào)警、輔助駕駛系統(tǒng)等相關(guān)技術(shù)研究。例如上海交通大學(xué)卓斌教授等研究開發(fā)了“人—車—路綜合環(huán)境下主動(dòng)安全性模擬系統(tǒng)”,實(shí)現(xiàn)了行車環(huán)境數(shù)據(jù)采集、通訊和駕駛軟件仿真的編制。在現(xiàn)行的高速公路交通管理中,為保證行車安全,常依據(jù)公路工程技術(shù)標(biāo)準(zhǔn)中的行車視距要求,規(guī)定一定行駛速度下的車輛必須保持相應(yīng)的間距。那么如何準(zhǔn)確跟蹤車輛之間的距離信息,就成了汽車毫米波雷達(dá)防追尾預(yù)警系統(tǒng)的關(guān)鍵。
把交互多模型(IMM)機(jī)動(dòng)目標(biāo)跟蹤算法運(yùn)用到汽車毫米波雷達(dá)防追尾預(yù)警系統(tǒng)當(dāng)中,當(dāng)毫米波雷達(dá)存在一定測(cè)量誤差和噪聲時(shí),目標(biāo)跟蹤算法能使毫米波雷達(dá)能夠準(zhǔn)確地探知前方車輛的運(yùn)動(dòng)狀態(tài),如車間距離、行駛速度等,從而提高駕駛員在高速公路上行駛安全性。
2 汽車防追尾預(yù)警系統(tǒng)工作原理
高速公路汽車防追尾預(yù)警系統(tǒng)由信息采集單元、信息處理單元和信息輸出裝置3 部分組成。信息采集單元通常由毫米波雷達(dá)、自車速度傳感器、轉(zhuǎn)向角傳感器、制動(dòng)傳感器、加速踏板傳感器和路面情況選擇開關(guān)等組成;信息處理單元主要為中央處理器;信息輸出裝置包括液晶顯示屏、報(bào)警蜂鳴器、報(bào)警指示燈等,圖1 是車載雷達(dá)防追尾預(yù)警系統(tǒng)組成方框圖。

信息采集單元不斷地采集相關(guān)信息,利用車載毫米波雷達(dá)獲得前方目標(biāo)車輛的運(yùn)動(dòng)信息,如車間距離、相對(duì)速度;利用自車傳感系統(tǒng)獲得自車運(yùn)行狀態(tài)信息,如自車速度、有無(wú)轉(zhuǎn)向、有無(wú)制動(dòng)等,并將此信息傳送至信息處理單元。信息處理單元根據(jù)自車速度、相對(duì)速度以及所建立的安全距離計(jì)算模型,計(jì)算出當(dāng)前應(yīng)保持的安全距離并與實(shí)測(cè)車間距離相比較。若實(shí)測(cè)車間距離大于提醒報(bào)警距離,則進(jìn)入下一工作循環(huán);若實(shí)測(cè)車間距離小于提醒報(bào)警距離,則進(jìn)行一次報(bào)警,提醒駕駛員松油門并做好剎車準(zhǔn)備;當(dāng)實(shí)測(cè)車間距離小于危險(xiǎn)報(bào)警距離,則進(jìn)行二次報(bào)警,促使駕駛員立即制動(dòng),以避免追尾事故的發(fā)生。液晶顯示屏用于顯示兩車間實(shí)際距離及相對(duì)速度,報(bào)警蜂鳴器和報(bào)警指示燈用于提供聲音報(bào)警和指示燈報(bào)警,及時(shí)的報(bào)警可以有效地提醒駕駛員,促使其采取合適的應(yīng)對(duì)措施。
汽車在道路上行駛時(shí),經(jīng)常要進(jìn)行加速、減速和轉(zhuǎn)彎,其運(yùn)動(dòng)狀態(tài)是不斷改變的。行駛中的汽車所處的道路環(huán)境是相當(dāng)復(fù)雜的,而安裝車載毫米波雷達(dá)的汽車本身也是不時(shí)地處于機(jī)動(dòng)狀態(tài)之中,因此車載雷達(dá)所探測(cè)的目標(biāo)也是在不停的變化當(dāng)中,導(dǎo)致所測(cè)兩汽車之間的距離數(shù)據(jù)存在一定測(cè)量誤差和噪聲,就會(huì)使汽車防追尾預(yù)警系統(tǒng)產(chǎn)生虛警或漏警。過高虛警率的雷達(dá)不但不能減輕駕駛者的工作負(fù)擔(dān),反而會(huì)造成駕駛者精神高度緊張,起到相反的效果。因此,采用合適的機(jī)動(dòng)目標(biāo)跟蹤算法,準(zhǔn)確地跟蹤自車前面的車輛目標(biāo)的狀態(tài)、及時(shí)估計(jì)行車的危險(xiǎn)程度是車載雷達(dá)測(cè)距系統(tǒng)的一項(xiàng)主要任務(wù)。
3 交互多模型機(jī)動(dòng)車輛跟蹤算法
交互多模算法是Blom和Bar-Shalom在多模型基礎(chǔ)上提出的,是在廣義偽貝葉斯算法基礎(chǔ)上,以卡爾曼濾波為出發(fā)點(diǎn),提出的一種具有馬爾可夫切換系數(shù)的交互式多模型算法,其中多種模型并行工作,目標(biāo)狀態(tài)估計(jì)是多個(gè)濾波器交互作用的結(jié)果。該算法不需要機(jī)動(dòng)檢測(cè),同時(shí)達(dá)到了全面自適應(yīng)能力。IMM算法的基本思想是在每一時(shí)刻,假設(shè)某個(gè)模型在現(xiàn)在時(shí)刻有效的條件下,通過混合前一時(shí)刻所有濾波器的狀態(tài)估計(jì)值來(lái)獲得與這個(gè)特定模型匹配的濾波器的初始條件;然后對(duì)每個(gè)模型并行實(shí)現(xiàn)正規(guī)濾波(預(yù)測(cè)與修正)步驟;最后,以模型匹配似然函數(shù)為基礎(chǔ)更新模型概率,并組合所有濾波器修正后的狀態(tài)估計(jì)值(加權(quán)和)以得到狀態(tài)估計(jì)。一個(gè)模型有效的概率在狀態(tài)估值和協(xié)方差的加權(quán)綜合計(jì)算中有重要作用。IMM的設(shè)計(jì)參數(shù)為:不同匹配和結(jié)構(gòu)的設(shè)置模型;不同模型的處理噪聲密度(一般來(lái)講,非機(jī)動(dòng)模型具有低水平測(cè)量噪聲,機(jī)動(dòng)模型具有較高水平的噪聲);模型之間的切換結(jié)構(gòu)和轉(zhuǎn)移概率。與其他的機(jī)動(dòng)目標(biāo)的跟蹤算法相比,比如辛格(Singer)算法、輸入估計(jì)(IE)算法、變維濾波(VD)算法等,交互多模(IMM)算法的優(yōu)點(diǎn)是它不需要機(jī)動(dòng)檢測(cè)器監(jiān)視機(jī)動(dòng)[10],從而不會(huì)產(chǎn)生因模型在機(jī)動(dòng)與非機(jī)動(dòng)之間切換而帶來(lái)的誤差。其算法原理如下:
假定有r 個(gè)模型:

其中X(k)為目標(biāo)狀態(tài)向量,Aj為狀態(tài)轉(zhuǎn)移矩陣,Gj為系統(tǒng)噪聲作用矩陣,Wj(k)是均值為零,協(xié)方差矩陣為Qj的白噪聲序列。
可用一個(gè)馬爾可夫鏈來(lái)控制這些模型之間的轉(zhuǎn)換,馬爾可夫鏈的轉(zhuǎn)移概率矩陣為:
測(cè)量模型為:

其中Z(k)為量測(cè)向量,H為觀測(cè)矩陣,V(k)為量測(cè)噪聲,已知其方差為R(k)。W(k)和V(k)是零均值且相互獨(dú)立。
IMM算法可歸納如下4 個(gè)步驟。
步驟1 輸入交互:
根據(jù)兩模型(k-l)時(shí)刻的濾波值和模型概率,計(jì)算交互混合后的濾波初始值,包括模型1 的濾波初始值:濾波估計(jì)值X 01
(k - 1)和估計(jì)協(xié)方差μ1(k - 1);模型2 的濾波初始值:濾波估計(jì)值X 02
(k - 1)和估計(jì)誤差協(xié)方差P02
(k - 1)。設(shè)系統(tǒng)在(k-1)時(shí)刻模型1 概率為μ1(k - 1),濾波值X1
(k - 1),估計(jì)誤差協(xié)方差為P2(k - 1)。模型2 的概率為μ2(k - 1),濾波值為X 2
(k - 1),系統(tǒng)估計(jì)誤差協(xié)方差為P2(k - 1)。則進(jìn)一步推廣到r 個(gè)模型,交互后r模型的濾波初始值為:


步驟2 模型條件濾波:
對(duì)應(yīng)于模型Mj(k),以X 0j
(k - 1|k - 1),P0j(k - 1|k - 1)及Z(k)作為輸入進(jìn)行卡爾曼濾波。
卡爾曼預(yù)測(cè)方程:

預(yù)測(cè)誤差協(xié)方差陣:

卡爾曼增益:
![]()
濾波方程為:

波誤差方差陣:

步驟3 模型概率更新:
i = 1rΛj(k)cj_,而Λj(k)為觀測(cè)Z(k)的似然函數(shù):
其中:
步驟4 輸出交互:
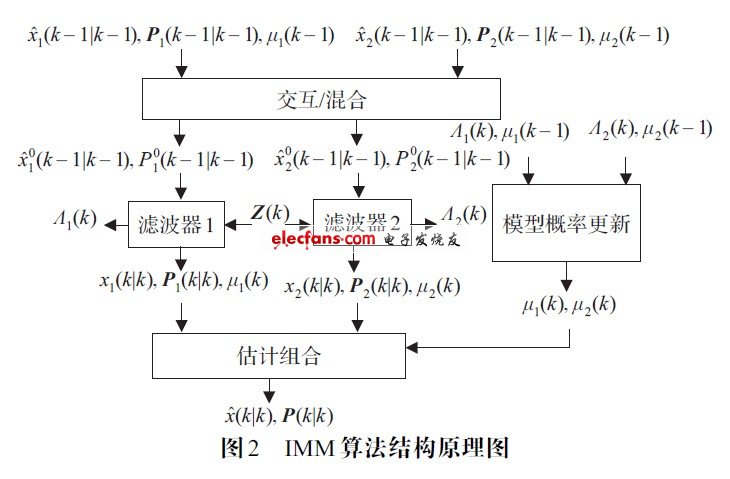
圖2 為IMM算法結(jié)構(gòu)原理圖
4 車輛運(yùn)動(dòng)模型分析與IMM算法跟蹤仿真
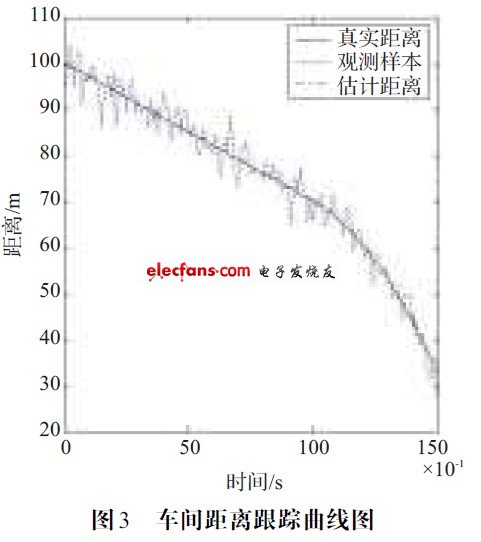
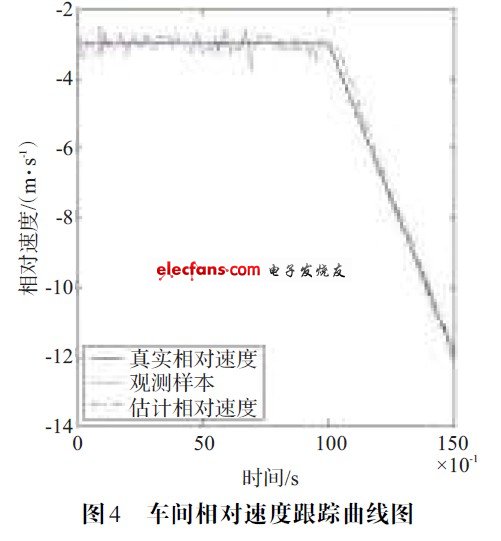
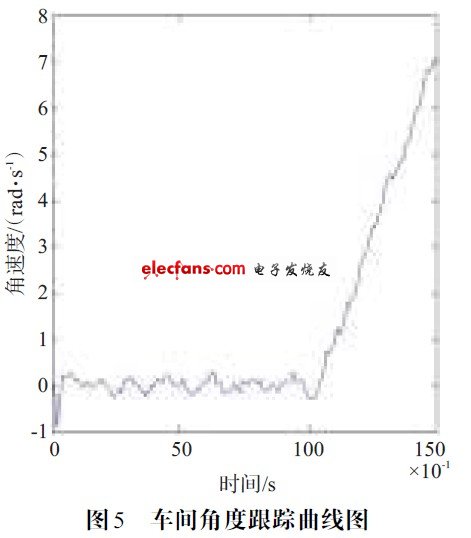
實(shí)驗(yàn)設(shè)計(jì):考慮兩輛車在道路上同向行駛,在0~10 s 時(shí),兩車均保持勻速直線運(yùn)動(dòng),由安裝在后車上的車載毫米波雷達(dá)檢測(cè)出與前車的距離為100 m,相對(duì)速度為-3 m/s,方位角2°。
在10~15 s 時(shí),前車向右偏轉(zhuǎn),與后車的相對(duì)角加速度為1° s2。
后車加速,與前車的縱向相對(duì)加速度為a = -1.8 m/s2。雷達(dá)的掃描周期為T=0.1 s,系統(tǒng)噪聲為σα = 0.3 m/s,σβ = 0.3°/s。量測(cè)誤差為σ1 = 1 m?σ2 = 0.5 m/s?σ3 = 0.2°/s。
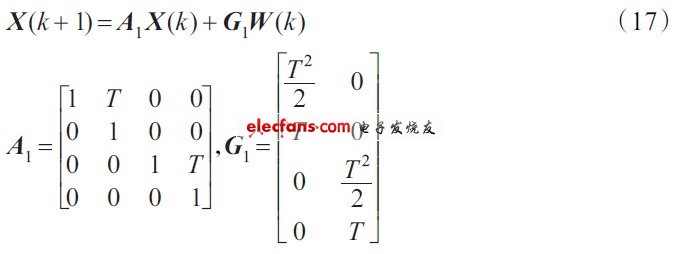
車輛勻速直線運(yùn)動(dòng)模型:
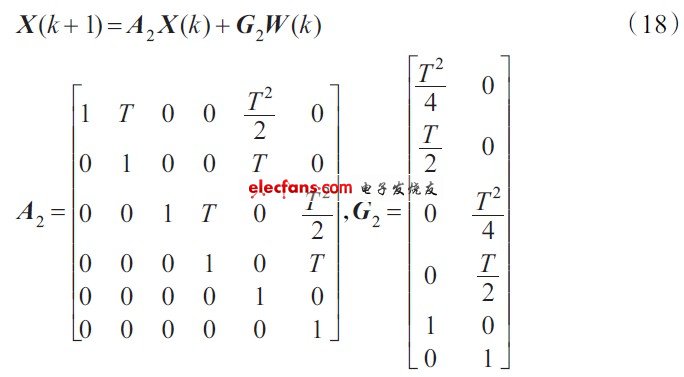
車輛加速運(yùn)動(dòng)模型:
兩種運(yùn)動(dòng)模型的系統(tǒng)噪聲向量W(k)協(xié)方差矩陣Q(k)=
兩種運(yùn)動(dòng)模型的觀測(cè)模型都是Z(k) =HX(k) + V(k) 其中:

兩個(gè)模型之間的轉(zhuǎn)移概率矩陣是:
采用蒙特卡洛方法對(duì)跟蹤濾波器進(jìn)行仿真分析,仿真次數(shù)為400 次。以下運(yùn)用Matlab7.0 仿真的結(jié)果。
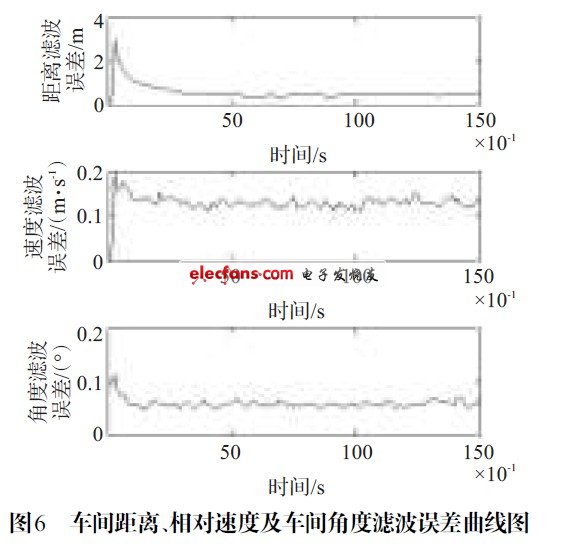
由圖3~圖6 仿真結(jié)果表明,該算法能夠有效地跟蹤前方車輛的運(yùn)動(dòng)信息,并且誤差較小,精度較高。
5 總結(jié)
重點(diǎn)研究了交互多模型機(jī)動(dòng)目標(biāo)跟蹤算法在車載毫米波雷達(dá)防追尾預(yù)警系統(tǒng)中的應(yīng)用,介紹機(jī)動(dòng)目標(biāo)跟蹤算法原理和步驟,并以高速公路上行駛的汽車為對(duì)象進(jìn)行防真,結(jié)果表明算法具有結(jié)構(gòu)簡(jiǎn)單、運(yùn)算量小、精度較高的優(yōu)點(diǎn),能夠提高車載雷達(dá)防追尾預(yù)警系統(tǒng)的使用效率,從而提高車輛駕駛的安全性,具有一定的應(yīng)用價(jià)值。