
O 引言
無線電高度表是飛航式反艦導(dǎo)彈的重要測量元件,其性能決定了導(dǎo)彈縱向彈道的控制品質(zhì)。對于超低空掠海飛行的導(dǎo)彈,無線電高度表反射回波的頻譜結(jié)構(gòu)比較復(fù)雜,導(dǎo)彈運(yùn)動時,各點(diǎn)之間有相對運(yùn)動,使得各反射點(diǎn)的多卜勒頻率不同,有可能在接收機(jī)形成差拍(稱二次多卜勒效應(yīng)),結(jié)果是合成回波信號的頻譜展寬;由于回波信號振幅的起伏也能形成頻譜的調(diào)制分量。信號雜波的交叉調(diào)制會使差拍信號的頻譜純度及波形發(fā)生畸變,導(dǎo)致計數(shù)器計數(shù)錯誤,從而使高度表輸出高度錯誤,嚴(yán)重時使導(dǎo)彈提前入水。
本文從無線電高度表工作原理的分析與研究出發(fā),完成了基于虛擬儀器的無線電高度表動態(tài)測試系統(tǒng)總體設(shè)計,該方案可以全面模擬無線電高度表動態(tài)工作過程,提早發(fā)現(xiàn)高度表故障。
1 無線電高度表原理
無線電高度表的工作方式有脈沖和調(diào)頻連續(xù)波2種。目前國外基本采用脈沖方式,國內(nèi)基本采用調(diào)頻連續(xù)波方式。調(diào)頻連續(xù)波的調(diào)制方式有3種:正弦波調(diào)制、三角波調(diào)制、鋸齒波調(diào)制,目前國內(nèi)反艦導(dǎo)彈上使用的無線電高度表,采用的調(diào)制方式都是鋸齒波調(diào)制。
圖1說明了以鋸齒波調(diào)制方式工作的雷達(dá)高度表獲取差拍信號的基本原理,設(shè)發(fā)射信號為鋸齒調(diào)頻連續(xù)波。Tm為調(diào)頻周期,其值遠(yuǎn)大于最大作用距離處目標(biāo)回波時延Tr。B為調(diào)頻帶寬,fo為中心頻率,k=B/T為調(diào)頻斜率,不考慮目標(biāo)的運(yùn)動,即目標(biāo)的徑向速度v=0。圖1(a)表示信號的頻率-時間關(guān)系,實(shí)線代表發(fā)射信號,虛線代表回波信號,波形與發(fā)射信號相似,只是在時間上,相對于發(fā)射信號有Td=2H/c的時延,該時延與導(dǎo)彈相對于地面/海面的實(shí)際高度成正比,通過對時延測量,即可達(dá)到測量高度的目的。
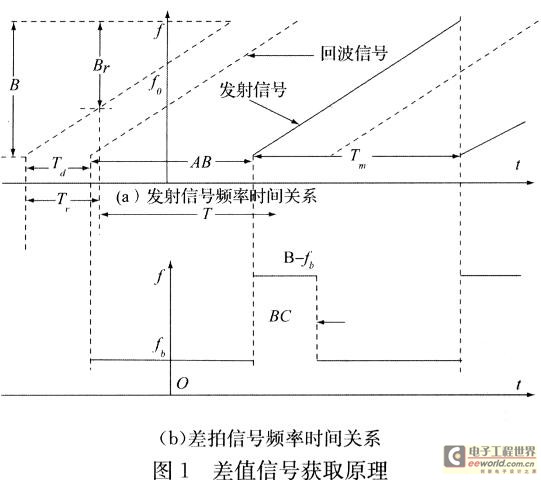
將發(fā)射信號與回波信號進(jìn)行混頻得到差拍信號。圖1(b)示出了差拍信號fb的頻率-時間關(guān)系,由圖可看出,差拍信號存在2個恒定頻率段AB和BC,BC段頻率為B-fb,時寬為Td,AB段為有效段,時寬為Tm-Td,在差拍信號中占主要成分。由圖1(b)可得,有效段內(nèi)差拍信號頻率為:

即有效時段內(nèi)的差拍信號頻率與回波時延(或與目標(biāo)的距離)成正比,因此只要求得有效段內(nèi)的差拍信號頻率,即可得到目標(biāo)的距離。
在雷達(dá)高度表中,回波信號來自天線波束照射的整個海表面。通常設(shè)這個表面包含大量獨(dú)立的隨機(jī)散射體,而每個散射體的散射中心相對于雷達(dá)高度表發(fā)射天線的距離是不同的。這樣總回波信號就相當(dāng)于不同延遲、在幅度上被散射系數(shù)σ和天線方向圖加權(quán)了的大量回波的合成。
第i個散射體回波形成的差拍信號輸出(經(jīng)低通濾波)為:

經(jīng)分析可得,在面目標(biāo)情況下,鋸齒波調(diào)制時,第i個散射單元回波譜為:

2 總體方案設(shè)計
高度表動態(tài)測試系統(tǒng)可以完成高度表測高過程的動態(tài)檢測和靈敏度的靜態(tài)檢測。它由適配器、計算機(jī)、數(shù)據(jù)采集卡、I/Q調(diào)制器、固定衰減器、可變衰減器、~115 V/400 Hz電源、27 V直流電源和相關(guān)測試軟件組成,系統(tǒng)構(gòu)成如圖2所示。
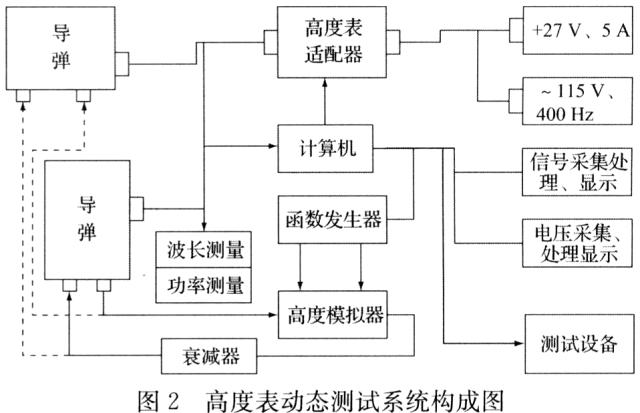
適配器用于完成與高度表的對接,實(shí)現(xiàn)被測高度表的信號激勵、調(diào)理和匹配,接收來自高度表的電源電壓、差拍信號和高度信號,提供~115 V/400 Hz或者直流電源。
高度模擬器用來模擬導(dǎo)彈高度上的連續(xù)變化。參考無線電高度表調(diào)頻連續(xù)波的中心工作頻率選擇合適工作范圍的I/Q調(diào)制器,根據(jù)鋸齒波調(diào)制規(guī)律,依照需要模擬的高度彈道,通過軟件合理控制輸入到I/Q調(diào)制器上的正弦激勵函數(shù)的頻率,對來自高度表發(fā)射機(jī)的微波信號進(jìn)行調(diào)制,產(chǎn)生差拍頻率,以實(shí)現(xiàn)模擬恒定高度和變化高度彈道,并擾動發(fā)射機(jī)頻率擴(kuò)展其頻譜,模擬雜波信號對高度表進(jìn)行動態(tài)測試。
微波衰減器用來控制能量上的變化。其中兩級衰減器串聯(lián)在發(fā)射一接收通道,以匹配高度表發(fā)射機(jī)、I/Q調(diào)制器和接收機(jī)。可變衰減器與固定衰減器配合使用,通過數(shù)據(jù)采集系統(tǒng)測量高度表狀態(tài)信號來檢測系統(tǒng)靈敏度。
計算機(jī)及軟件負(fù)責(zé)協(xié)調(diào)系統(tǒng)的工作、控制數(shù)據(jù)采集系統(tǒng)和發(fā)生函數(shù)的工作狀態(tài),數(shù)據(jù)采集系統(tǒng)實(shí)時采集差拍信號的波形和高度電壓值,送往計算機(jī)進(jìn)行波形分析和頻譜處理。計算機(jī)控制函數(shù)發(fā)生產(chǎn)生y=AIsinωt和y==AQsinωt的正交函數(shù),作為I/Q調(diào)制器的輸入。
3 基于PCI-6229數(shù)據(jù)采集卡的動態(tài)測試系統(tǒng)
3.1 PCI-6229數(shù)據(jù)采集模塊簡述
PCI-6229是NI公司新推出的M系列DAQ卡,具有A/D、D/A、I/O、Count/Timers功能,模擬輸入通道達(dá)到單端32路,差分16路,分辨率為16位,最大采樣速率為250 KS/s,輸入FIFO緩沖區(qū)為4 095次采樣,數(shù)據(jù)傳輸方式支持DMA、中斷、可編程3種方式;模擬輸出通道有4路;I/O通道有48路,其中32路具有波型輸出能力,軟件上能一次讀取32位長的端口狀態(tài);有2個定時/計數(shù)器,分辨率為32位,內(nèi)部時鐘頻率為80 MHz。
3.2 系統(tǒng)硬件構(gòu)成
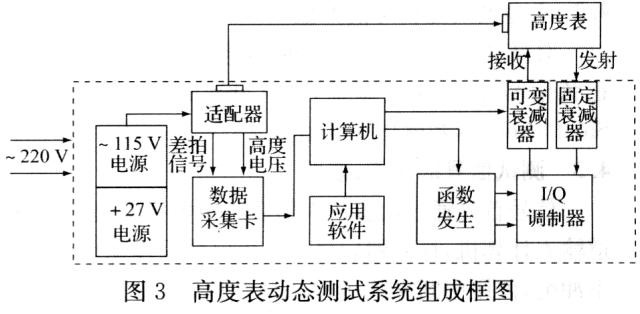
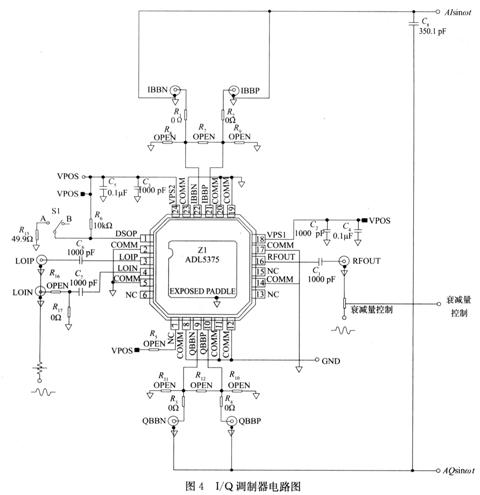
測試系統(tǒng)硬件由發(fā)射和接收2部分構(gòu)成。計算機(jī)通過數(shù)據(jù)采集系統(tǒng)的AO通道發(fā)射控制信號給可變衰減器、發(fā)射正交函數(shù)給I/Q調(diào)制器,然后計算機(jī)通過AI通道將無線電高度表的高度電壓、差拍信號、發(fā)射信號、接收信號、工作狀態(tài)采集進(jìn)來作分析處理,結(jié)構(gòu)框圖如3所示,其中I/Q調(diào)制器選用ADI公司的ADL5375,工作頻率400MHz~6 GHz,其周邊電路圖見圖4。
4 測試系統(tǒng)軟件設(shè)計
4.1 采集卡設(shè)置及測量任務(wù)的配置
首先將數(shù)據(jù)采集卡安裝到計算機(jī)上,在MAX中的Data Neighborhood圖標(biāo)上右擊并選擇Create New…,在目錄中選擇Taditional NI-DAQ virtual并按下Next鍵,然后就可以配置一個讀取輸入信號的通道了。按下Next按鈕后,將會出現(xiàn)一個數(shù)據(jù)采集卡屬性設(shè)置窗口,在此窗口中根據(jù)板卡的使用情況可以對模擬輸入、模擬輸出、數(shù)字I/O等進(jìn)行設(shè)置,隨后為任務(wù)命名。
4.2 I/Q調(diào)制器信號的產(chǎn)生
對高度表高度響應(yīng)測試時,需要發(fā)送一定頻率范圍的正弦信號給I/Q調(diào)制器,在LabWindows/CVI中使用SinePattern函數(shù)輸出正弦信號。
4.3 測試信號的采樣、讀取
信號首先通過前置放大器后經(jīng)由數(shù)據(jù)采集卡的AI通道輸入計算機(jī),存儲然后顯示。為保持采樣速度與顯示的不沖突,使用中斷方式讀取采樣數(shù)據(jù),要實(shí)現(xiàn)中斷處理方式工作,需要作2項(xiàng)主要工作:一是編寫中斷處理程序,二是向系統(tǒng)注冊這個程序。
在中斷服務(wù)程序中,使用DAQmxReadAnalogF64()函數(shù)來讀取采集卡上緩沖區(qū)的數(shù)據(jù),用戶必須在啟動采集任務(wù)前事先申請足夠大小的緩沖區(qū),用一個全局指針來指向這個緩沖區(qū),將數(shù)據(jù)連接選擇為通道連接方式,不同通道數(shù)據(jù)選擇通過memcpy[]函數(shù)控制,然后對數(shù)據(jù)進(jìn)行處理,在結(jié)束任務(wù)后釋放此緩沖區(qū)。
4.4 波形存儲與讀取
在采集之后可以實(shí)時的將數(shù)據(jù)保存成2進(jìn)制文件(與導(dǎo)彈遙測數(shù)據(jù)兼容),通過fopen函數(shù)來實(shí)現(xiàn)對文本數(shù)據(jù)文件的調(diào)用,使用fwrite函數(shù)實(shí)現(xiàn)對數(shù)據(jù)的寫入,使用fread函數(shù)實(shí)現(xiàn)對數(shù)據(jù)的讀取,使用fclose函數(shù)對其關(guān)閉。選用Graph控件,通過plotwaveform函數(shù)對讀取到緩沖區(qū)中的數(shù)據(jù)進(jìn)行回調(diào)。
4.5 測試信號頻域分析
在LabWindows/CVI中通過傅里葉函數(shù)對波形數(shù)組進(jìn)行傅里葉變換,并通過ToPolarlD將傅里葉變換得到的輸出實(shí)部、虛部數(shù)組轉(zhuǎn)換成極坐標(biāo)形式。通過InvFFT實(shí)現(xiàn)對波形數(shù)組的傅里葉反變換。
4.6 軟件組成
4.6.1 高度響應(yīng)測試
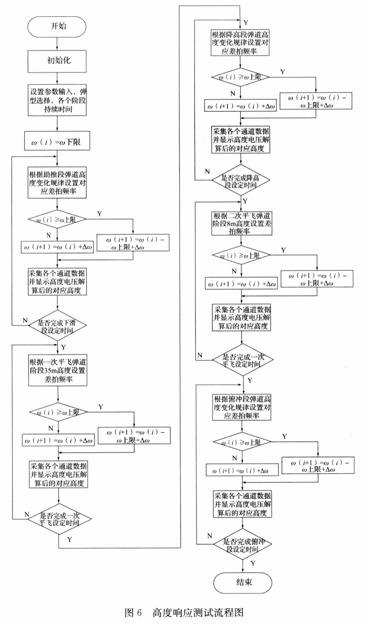
高度響應(yīng)測試用來完成高度彈道參數(shù)的設(shè)置(不同彈道階段持續(xù)時間)、彈型的選擇和高度響應(yīng)曲線的顯示,見圖5、圖6所示。
4.6.2 信號分析
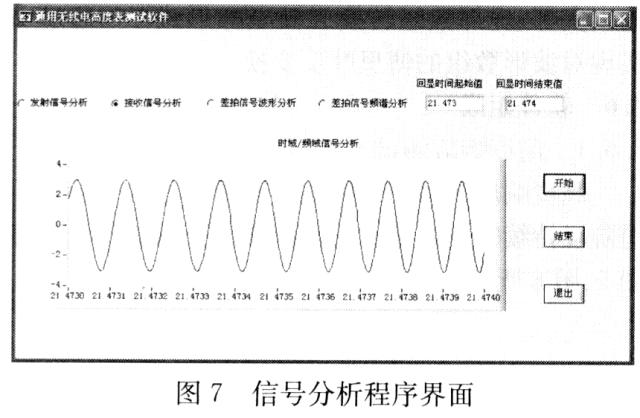
信號分析完成發(fā)射信號、接收信號、差拍信號波形的回放與比對,并對差拍信號進(jìn)行傅里葉變換,對其頻譜進(jìn)行分析,以判別高度表是否產(chǎn)生“高置”故障。界面見圖7。
4.6.3 靈敏度測試
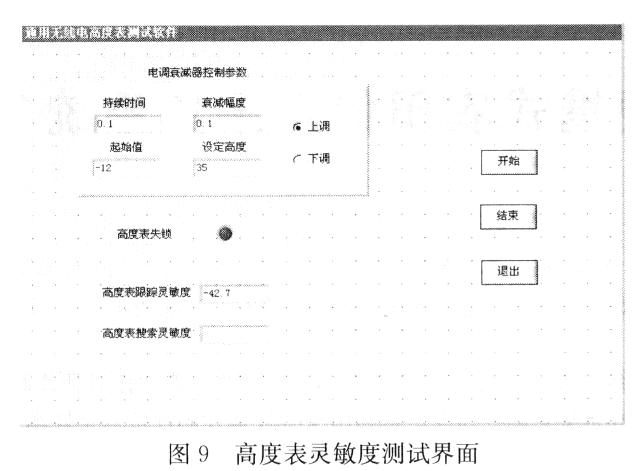
高度表靈敏度測試需要設(shè)置設(shè)定高度,衰減控制規(guī)律的設(shè)定,以完成高度表在不同高度下搜索/跟蹤靈敏度測試,見圖9。
5 結(jié)束語
虛擬儀器技術(shù)以其性價比高、開放性強(qiáng)等優(yōu)勢迅速占領(lǐng)市場,成為測試儀器新的經(jīng)濟(jì)點(diǎn)。虛擬儀器的核心是軟件,這使虛擬儀器具有了與傳統(tǒng)測試儀器大不相同的技術(shù)特征,實(shí)現(xiàn)了測試儀器生產(chǎn)者與使用者夢寐以求的儀器開放性。本文針對無線電高度表測試實(shí)例,研究設(shè)計了基于虛擬儀器技術(shù)的第3代自動測試設(shè)備。但該系統(tǒng)只是實(shí)現(xiàn)了基本參數(shù)的自動測量,而一個完整的自動測試系統(tǒng)還需要增加更多自動化水平,如具備遠(yuǎn)程控制、更新升級、故障診斷等功能。在此方面還有待做深入研究以使得該測試系統(tǒng)更加完備。