
引言
傳統(tǒng)繼電器檢測和保護功能多由電磁器件完成,其動作時間長,保護精度低,已不能滿足現(xiàn)代輸、配電系統(tǒng)自動化的需要。智能化低壓電器其技術(shù)特點主要是可通信,能與現(xiàn)場總線連接,這種技術(shù)給低壓電器帶來革命性的變化,為此對低壓電器提出了可通信要求。
本文研究的電力系統(tǒng)限時速切繼電器的保護功能,是采用微處理技術(shù)和現(xiàn)場總線技術(shù)等設(shè)計的可通信的智能化繼電器。這里研究的限時速切繼電器,以CAN總線(Controller Area Network)作為一種支持分布式控制的底層串行通信網(wǎng)絡(luò),實現(xiàn)現(xiàn)場電器與上位機之間的信息傳遞,具有通信實時性好、可靠性高、連接使用方便靈活等特點,非常符合國內(nèi)低壓電器的發(fā)展趨勢。
1 基于CAN總線的可通信智能繼電器總體設(shè)計
在采用總線連接微機和微處理器系統(tǒng)構(gòu)成的現(xiàn)場總線控制系統(tǒng)中,由微處理器系統(tǒng)構(gòu)成的下位節(jié)點都能夠獨立完成一定功能,還可進行直接的參數(shù)設(shè)定和顯示等,每個下位節(jié)點都可通過總線將數(shù)據(jù)傳送給上位PC監(jiān)控節(jié)點或其它相關(guān)的節(jié)點,使相互關(guān)聯(lián)的繼電保護裝置之間具有了數(shù)據(jù)交換的功能,可以協(xié)調(diào)工作。
本文設(shè)計的限時速切繼電器,在CAN總線上連接一個上位監(jiān)控PC節(jié)點和3個下位智能電流繼電器節(jié)點,構(gòu)建智能繼電器的監(jiān)控保護系統(tǒng),系統(tǒng)結(jié)構(gòu)示意如圖1所示。
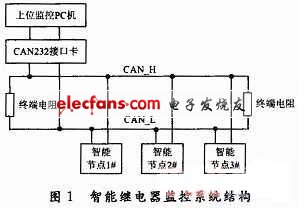
為了增強通信的可靠性,CAN總線網(wǎng)絡(luò)的2個端點通常要加入終端匹配電阻,阻值的大小由傳輸電纜的特性阻抗所決定。系統(tǒng)設(shè)計采用雙絞線連接,特性阻抗為120 Ω,則總線上的2個端點集成120 Ω的終端電阻即可。
2 基于CAN總線的可通信智能繼電器硬件設(shè)計
智能繼電器節(jié)點的硬件組成主要包括:主控單元、測控電路(數(shù)據(jù)采集和轉(zhuǎn)換、監(jiān)控存儲電路、按鍵和顯示部分、動作信號)、CAN通信接口和電源等部分組成,如圖2所示。

2.1 主控制器
鑒于P87C591強大的80C51性能和A/D轉(zhuǎn)換及cAN相關(guān)特性,對于我們開發(fā)基于CAN總線通信的智能繼電器是非常適合的。因此,系統(tǒng)的主控制器選用功能強大的P87C591單片機,作為主控制器的首選芯片。不但可以滿足數(shù)據(jù)處理的要求,還可不必外接CAN控制器直接實現(xiàn)CAN通信功能,大量節(jié)省了硬件資源。
2.2 存儲監(jiān)控部分
監(jiān)控設(shè)計包括監(jiān)控電路設(shè)計和軟件監(jiān)控程序設(shè)計2部分,硬件監(jiān)控電路功能主要包括數(shù)據(jù)保護、上電復(fù)位、掉電復(fù)位、“看門狗”定時器(選用具有SPI接口的Xicor公司的25043/5系列)和電源監(jiān)測等部分。
2.3 按鍵和顯示部分
可通信智能繼電器所應(yīng)用的繼電保護系統(tǒng),對于各個保護的節(jié)點的監(jiān)測都需通過上位控制PC機來實現(xiàn),采樣成本低、接口簡單、功耗小的液晶顯示模塊。控制器的顯示部分采用青云公司的LCM061A六位八段模塊作為顯示輸出。使用者只要向LCM送入相應(yīng)的命令和數(shù)據(jù)就可實現(xiàn)所需要的顯示,模塊與CPU連接簡單,使用起來靈活方便。至于按鍵,本系統(tǒng)只需4個按鍵即可實現(xiàn)參數(shù)修改和設(shè)定,因此可分別與主控制器的I/O口直接相連即可。
2.4 信號部分
電流繼電器整個繼電器節(jié)點工作情況是先用微控制器完成電流的比較、時間的控制,如果所監(jiān)測線路中的電流超出設(shè)定的電流值,則開始計時并繼續(xù)比較電流值。若到了設(shè)定的時間發(fā)現(xiàn)被采集的電流值仍然大于設(shè)定值,那么微控制器發(fā)出使繼電器動作的控制信號。由于單片機I/O口輸出電流為1.6 mA,不能達到繼電器動作電流,所以我們通過7407芯片將驅(qū)動電流放大至40 mA以驅(qū)動繼電器動作。
2.5 數(shù)據(jù)采集和轉(zhuǎn)換
因為智能電流繼電器所需采集的電流為線路中的電流值,而針對電力系統(tǒng)輸、配電線路中通過的高電壓和大電流,必須選用電流互感器。測量儀表選用容量為5 VA,二次側(cè)額定電流為1 A的互感器,將互感器二次側(cè)電流通過采樣電阻轉(zhuǎn)換成對于一定比例關(guān)系的電壓值。
A/D轉(zhuǎn)換采用外接MAXIM公司12位精度高速A/D轉(zhuǎn)換芯片,是因為P87C591內(nèi)部芯片所帶的10位A/D為單極性轉(zhuǎn)換,不能滿足交變電流采樣雙極性的要求。利用MAX197,P87C591以及驅(qū)動與隔離電路構(gòu)成一個完整的實時測控系統(tǒng)。
采用查詢的方式通過P口讀取/INT引腳的電平是否為低,如果不為低就繼續(xù)查詢等待,如果為低電平則可讀取數(shù)據(jù)。A/D轉(zhuǎn)換程序放在T0中斷程序中進行,每隔1 ms進行一次模擬數(shù)據(jù)采集和轉(zhuǎn)換,在轉(zhuǎn)換的間隙MAX197處于低電流關(guān)斷狀態(tài)。
2.6 節(jié)點電源
智能節(jié)點系統(tǒng)中所需的+5 V直流電源,需將有效值為220 V、頻率為50 Hz的交流電經(jīng)降壓、整流和濾波,再經(jīng)過降壓和穩(wěn)壓電路后作為節(jié)點的電源。
2.7 通信部分
集成在P87C591中的CAN控制器SJA1000和CAN高速收發(fā)器PCA82C250以及高速光電耦合器6N137構(gòu)成通信的主要部分,其中SJA1000是實現(xiàn)CAN總線通信的核心芯片,與收發(fā)器82C250配套使用,組成完整的CAN通信接口。SJA1000工作模式采用BasicCAN模式,滿足數(shù)據(jù)傳輸量不大的一般性工控場合,故被本系統(tǒng)采用。單片機對SJA1000進行控制及收發(fā)數(shù)據(jù)均通過對SJA1000的內(nèi)部寄存器的讀寫訪問來實現(xiàn)的,操作如同訪問外部RAM。PCA82C250負責與CAN物理層的連接,接收和發(fā)送數(shù)據(jù)。為了增強CAN總線節(jié)點的抗干擾能力,P87C591的TXDC和RXDC(即SJA1000的TX和RX)通過高速光耦6N137后與PCA82C250相連,光耦部分電路所采用的兩個電源必須完全隔離,這樣才能達到隔離的作用。為了防止PCA82C 250受過流的沖擊,CANH和CANL引腳各自通過一個5 Ω的電阻與CAN總線相連。另外,在CANH和CANL與地之間并聯(lián)2個30pF的小電容,以濾除總線上的高頻干擾和防電磁輻射口。
3 上位控制PC機節(jié)點軟硬件設(shè)計
3.1 硬件接口
CAN-232采用ZLGCAN-232轉(zhuǎn)換卡,PC只需經(jīng)RS 232接口簡單連接即可實現(xiàn)CAN數(shù)據(jù)通信,進行CAN信息幀的接收發(fā)送。CAN-232接口卡也可以直接應(yīng)用到嵌入式系統(tǒng)中,可在不改變已有硬件結(jié)構(gòu)的情況下使嵌人式產(chǎn)品具有CAN通信接口。RS 232總線接口部分是轉(zhuǎn)換卡板和PC機之間交換數(shù)據(jù)的橋梁,PC機之間的數(shù)據(jù)交換是通過MAX232實現(xiàn)的,其將232電平轉(zhuǎn)換成TTL電平。CAN通訊部分實現(xiàn)了CAN物理層和數(shù)據(jù)鏈路層協(xié)議,板卡中由帶CAN控制器的處理器P87C591構(gòu)成。
3.2 軟件設(shè)計
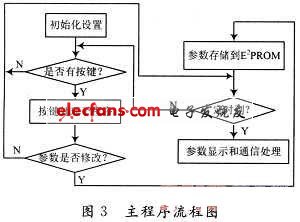
可通信智能繼電器節(jié)點的主要任務(wù)是能夠獨立完成線路電流的實時監(jiān)控和保護功能,并且能夠利用CAN總線接口與上位控制PC進行雙向數(shù)字通信功能。其中數(shù)據(jù)采集和轉(zhuǎn)換程序在T0中斷服務(wù)程序中進行,通信收發(fā)在CAN中斷子程序中進行。主程序采用循環(huán)查詢的方法檢測有無按鍵,然后定時處理一些如顯示數(shù)據(jù)更新、通信待發(fā)數(shù)據(jù)準備和接收數(shù)據(jù)處理等。
在智能節(jié)點控制系統(tǒng)軟件設(shè)計中,為了充分而合理的利用硬件資源并且構(gòu)建一個清晰的程序構(gòu)架,把程序大致分為:初始化程序、數(shù)據(jù)采集和轉(zhuǎn)換程序、監(jiān)控存儲程序、按鍵和顯示程序、CAN通信程序、數(shù)據(jù)、計算處理程序以及起整體調(diào)度作用的主程序等模塊。主程序流程如圖3所示。
采用VB對上位軟件進行編程,調(diào)用CAN232智能CAN接口卡隨機提供功能強大的CAN接口函數(shù)庫文件(232CAN.h、232CAN.lib、232CAN.dl l),從而很方便的實現(xiàn)了CAN協(xié)議CAN2.0A和CAN2.0B規(guī)范PeliCAN的數(shù)據(jù)通訊。
上位PC節(jié)點的監(jiān)控制程序和下位節(jié)點的設(shè)計相類似,也使用了模塊化的設(shè)計方法。可以很方便的在現(xiàn)有的程序基礎(chǔ)之上進行改造,通過添加新的模塊以達到功能擴展的需要。
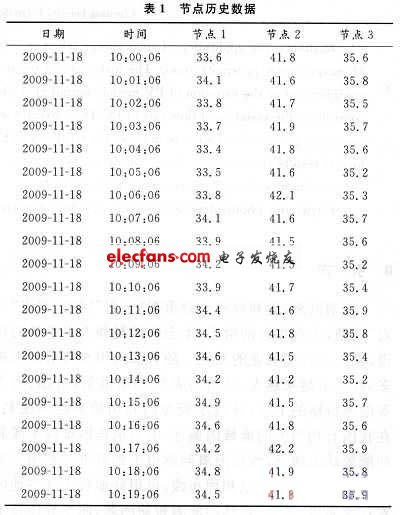
上位PC節(jié)點的監(jiān)控軟件主要由主界面、歷史數(shù)據(jù)和參數(shù)設(shè)定界面組成。其中主界面包含了上位節(jié)點設(shè)計中的主要和功能操作:串口和總線參數(shù)的設(shè)定、通信連接、數(shù)據(jù)發(fā)送、應(yīng)答信息和工作狀態(tài)以及監(jiān)控數(shù)據(jù)顯示等。歷史數(shù)據(jù)界面通過在上位PC節(jié)點的Windows操作系統(tǒng)下用Acess軟件建立一個數(shù)據(jù)庫,如表1所示的數(shù)據(jù)為下位節(jié)點在一定時間內(nèi)運行采集的電流值。在VB中調(diào)用兩個控件Data和DBGrid將數(shù)據(jù)庫和上位節(jié)點的監(jiān)控界面連接起來。參數(shù)設(shè)定界面可對節(jié)點的設(shè)定電流值和時間值進行修改,然后點擊設(shè)定輸入按鈕即可完成設(shè)定參數(shù)的發(fā)送。
4 結(jié)語
本文設(shè)計的基于CAN總線可通信的智能電流繼電器,不僅能夠完成傳統(tǒng)意義下電磁式電流繼電器、時間繼電器和信號繼電器組合在一起才能實現(xiàn)的限時速切功能,還可使現(xiàn)場電器與上位機實現(xiàn)雙向通信功能。通過上位PC機直接對電流和時間參數(shù)進行設(shè)定,還可直接從上位機查看繼電器采集的線路實時狀況參數(shù)(如線路電流和繼電器動作情況)。不但通訊效率高、抗干擾性強、傳輸距離較遠,而且與其他總線相比具有造價低廉、實現(xiàn)簡易的優(yōu)勢,在低成本自動化領(lǐng)域?qū)⒂兄鴱V泛的應(yīng)用前景。