
1 引言
集散控制系統(tǒng)(dcs)是應(yīng)用計算機(jī)技術(shù)對生產(chǎn)過程進(jìn)行集中監(jiān)視、操作、管理而對現(xiàn)場裝置的控制分散的基本控制技術(shù)。集散控制系統(tǒng)的重要組成部分是組態(tài)軟件。傳統(tǒng)的工業(yè)控制軟件重復(fù)使用率低開發(fā)周期長,很難滿足工業(yè)自動化的要求。工業(yè)自動化組態(tài)軟件的出現(xiàn)為解決實際工程中的問題提供了一種新的方法,它能夠使用戶根據(jù)自己的控制對象和控制目的任意組態(tài),使自動化工程人員能夠面向問題的設(shè)計。
控制組態(tài)仿真軟件要比傳統(tǒng)仿真軟件作出改進(jìn),使其不僅僅可以供控制人員進(jìn)行一些控制的組態(tài)構(gòu)建,還可以提供給操作人員進(jìn)行仿真培訓(xùn),以及進(jìn)行控制管理人員的培訓(xùn)。只要使其控制組態(tài)的模式和現(xiàn)場模式保持一致,就可以達(dá)到仿真的目的,而不必在實際的dcs控制室進(jìn)行試驗和調(diào)試,這樣可以減少投資,并減小和避免工藝投放風(fēng)險。因此,開發(fā)結(jié)構(gòu)合理、安全可靠、簡單實用的仿真系統(tǒng)控制組態(tài)軟件,具有很好的應(yīng)用前景。
2 系統(tǒng)結(jié)構(gòu)及其實現(xiàn)
2.1 控制組態(tài)概述
控制組態(tài)仿真軟件作為集成的圖形編程語言,是針對dcs系統(tǒng)所開發(fā)的全中文界面的控制方案組態(tài)工具,它與dcs系統(tǒng)流程圖組態(tài)軟件聯(lián)合完成對系統(tǒng)的圖形組態(tài),是新型dcs系統(tǒng)組態(tài)軟件的重要組成部分之一,也是算法控制組態(tài)的核心部分。
本設(shè)計參考了國際電工委員會iec61131-3提供的用于控制的4種編程語言標(biāo)準(zhǔn):梯形圖,結(jié)構(gòu)化高級語言,方框圖,指令助記符,采用了簡單方便易于用戶學(xué)習(xí)和使用的方框圖形式的編程語言,使編程環(huán)境更加高效,更加人性化。
本文根據(jù)面向?qū)ο蟮脑O(shè)計思想,基于目前控制領(lǐng)域通用的windows2000平臺,采用visual c++6.0語言實現(xiàn)了程序設(shè)計。這樣,不僅使人機(jī)界面更加友好,而且能夠更好地利用windows系統(tǒng)的資源,使組態(tài)軟件的功能更為強(qiáng)大。
系統(tǒng)的結(jié)構(gòu)如圖1所示。各部分的功能及實現(xiàn)方法敘述如下。
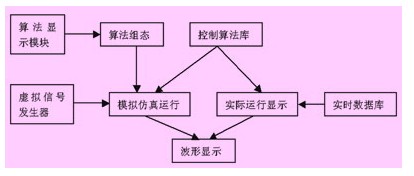
圖1 系統(tǒng)結(jié)構(gòu)圖
2.2 算法顯示模塊和控制算法組態(tài)
該軟件向工程人員提供了一個圖形化的控制算法組態(tài)平臺,工程人員可以根據(jù)實際工業(yè)過程,選用合適的控制算法,用圖形的方式,即選用算法顯示模塊,組成各種控制回路,然后將組態(tài)信息保存到組態(tài)文件中。控制算法組態(tài)的主界面如圖2所示。

圖2 控制組態(tài)主界面
圖2算法顯示模塊指的是對具體算法的抽象顯示。在圖形化組態(tài)界面上,每種具體的控制算法對應(yīng)一種算法顯示模塊,以方框圖的形式顯示,用戶只需用簡單的鼠標(biāo)操作就能將指定的算法顯示模塊添加到指定的控制回路中,或刪除和修改參數(shù),從而完成控制算法的組態(tài)。其在控制組態(tài)界面中的顯示是帶有輸入輸出端子的矩形,圖3是一個加法顯示模塊的外觀及顯示說明:

圖3 算法顯示模塊圖
其中,模塊在回路中的編號只有在進(jìn)行過編譯且用戶確定后才正確顯示,編譯前不顯示。而模塊流水號只是在繪制過程中記錄的全局唯一的模塊的id號,它由系統(tǒng)自動生成,用戶不能修改。
設(shè)計控制組態(tài)仿真軟件的界面時,主要是實現(xiàn)組態(tài)用到的算法顯示模塊、連線和文本注釋的繪制和顯示。從共性的角度考慮,決定將對算法模塊的實現(xiàn)用一個從cobject類派生的類cfunmod來統(tǒng)一實現(xiàn)和管理,在該類中設(shè)定標(biāo)志變量對具體的算法顯示模塊類型進(jìn)行區(qū)分,同時標(biāo)記該模塊的輸入輸出端子數(shù)目。連線使用從cobject類派生的類clinkline實現(xiàn),包含對連線兩端所連算法顯示模塊的標(biāo)記。而文本注釋則由另一個從cobject類派生的類ctext來實現(xiàn),為普通注釋時,記錄字符串類型的注釋參數(shù),而與數(shù)據(jù)庫中的點關(guān)聯(lián)時,記錄點名。在繪制回路的過程中,它們都是由基于各類的鏈表來操作和管理的。
為支持對算法顯示模塊和文本注釋的參數(shù)配置,需實現(xiàn)屬性對話框,這是很容易實現(xiàn)的。這樣,通過鼠標(biāo)雙擊算法模塊,彈出屬性對話框,用戶填入相應(yīng)的參數(shù),點擊確定保存即可。
1 引言
集散控制系統(tǒng)(dcs)是應(yīng)用計算機(jī)技術(shù)對生產(chǎn)過程進(jìn)行集中監(jiān)視、操作、管理而對現(xiàn)場裝置的控制分散的基本控制技術(shù)。集散控制系統(tǒng)的重要組成部分是組態(tài)軟件。傳統(tǒng)的工業(yè)控制軟件重復(fù)使用率低開發(fā)周期長,很難滿足工業(yè)自動化的要求。工業(yè)自動化組態(tài)軟件的出現(xiàn)為解決實際工程中的問題提供了一種新的方法,它能夠使用戶根據(jù)自己的控制對象和控制目的任意組態(tài),使自動化工程人員能夠面向問題的設(shè)計。
控制組態(tài)仿真軟件要比傳統(tǒng)仿真軟件作出改進(jìn),使其不僅僅可以供控制人員進(jìn)行一些控制的組態(tài)構(gòu)建,還可以提供給操作人員進(jìn)行仿真培訓(xùn),以及進(jìn)行控制管理人員的培訓(xùn)。只要使其控制組態(tài)的模式和現(xiàn)場模式保持一致,就可以達(dá)到仿真的目的,而不必在實際的dcs控制室進(jìn)行試驗和調(diào)試,這樣可以減少投資,并減小和避免工藝投放風(fēng)險。因此,開發(fā)結(jié)構(gòu)合理、安全可靠、簡單實用的仿真系統(tǒng)控制組態(tài)軟件,具有很好的應(yīng)用前景。
2 系統(tǒng)結(jié)構(gòu)及其實現(xiàn)
2.1 控制組態(tài)概述
控制組態(tài)仿真軟件作為集成的圖形編程語言,是針對dcs系統(tǒng)所開發(fā)的全中文界面的控制方案組態(tài)工具,它與dcs系統(tǒng)流程圖組態(tài)軟件聯(lián)合完成對系統(tǒng)的圖形組態(tài),是新型dcs系統(tǒng)組態(tài)軟件的重要組成部分之一,也是算法控制組態(tài)的核心部分。
本設(shè)計參考了國際電工委員會iec61131-3提供的用于控制的4種編程語言標(biāo)準(zhǔn):梯形圖,結(jié)構(gòu)化高級語言,方框圖,指令助記符,采用了簡單方便易于用戶學(xué)習(xí)和使用的方框圖形式的編程語言,使編程環(huán)境更加高效,更加人性化。
本文根據(jù)面向?qū)ο蟮脑O(shè)計思想,基于目前控制領(lǐng)域通用的windows2000平臺,采用visual c++6.0語言實現(xiàn)了程序設(shè)計。這樣,不僅使人機(jī)界面更加友好,而且能夠更好地利用windows系統(tǒng)的資源,使組態(tài)軟件的功能更為強(qiáng)大。
系統(tǒng)的結(jié)構(gòu)如圖1所示。各部分的功能及實現(xiàn)方法敘述如下。
圖1 系統(tǒng)結(jié)構(gòu)圖
2.2 算法顯示模塊和控制算法組態(tài)
該軟件向工程人員提供了一個圖形化的控制算法組態(tài)平臺,工程人員可以根據(jù)實際工業(yè)過程,選用合適的控制算法,用圖形的方式,即選用算法顯示模塊,組成各種控制回路,然后將組態(tài)信息保存到組態(tài)文件中。控制算法組態(tài)的主界面如圖2所示。
圖2 控制組態(tài)主界面
圖2算法顯示模塊指的是對具體算法的抽象顯示。在圖形化組態(tài)界面上,每種具體的控制算法對應(yīng)一種算法顯示模塊,以方框圖的形式顯示,用戶只需用簡單的鼠標(biāo)操作就能將指定的算法顯示模塊添加到指定的控制回路中,或刪除和修改參數(shù),從而完成控制算法的組態(tài)。其在控制組態(tài)界面中的顯示是帶有輸入輸出端子的矩形,圖3是一個加法顯示模塊的外觀及顯示說明:
圖3 算法顯示模塊圖
其中,模塊在回路中的編號只有在進(jìn)行過編譯且用戶確定后才正確顯示,編譯前不顯示。而模塊流水號只是在繪制過程中記錄的全局唯一的模塊的id號,它由系統(tǒng)自動生成,用戶不能修改。
設(shè)計控制組態(tài)仿真軟件的界面時,主要是實現(xiàn)組態(tài)用到的算法顯示模塊、連線和文本注釋的繪制和顯示。從共性的角度考慮,決定將對算法模塊的實現(xiàn)用一個從cobject類派生的類cfunmod來統(tǒng)一實現(xiàn)和管理,在該類中設(shè)定標(biāo)志變量對具體的算法顯示模塊類型進(jìn)行區(qū)分,同時標(biāo)記該模塊的輸入輸出端子數(shù)目。連線使用從cobject類派生的類clinkline實現(xiàn),包含對連線兩端所連算法顯示模塊的標(biāo)記。而文本注釋則由另一個從cobject類派生的類ctext來實現(xiàn),為普通注釋時,記錄字符串類型的注釋參數(shù),而與數(shù)據(jù)庫中的點關(guān)聯(lián)時,記錄點名。在繪制回路的過程中,它們都是由基于各類的鏈表來操作和管理的。
為支持對算法顯示模塊和文本注釋的參數(shù)配置,需實現(xiàn)屬性對話框,這是很容易實現(xiàn)的。這樣,通過鼠標(biāo)雙擊算法模塊,彈出屬性對話框,用戶填入相應(yīng)的參數(shù),點擊確定保存即可。
2.3 控制算法庫
控制算法庫是整個系統(tǒng)仿真運行的基石。系統(tǒng)中內(nèi)置了若干種控制算法。為了保證控制算法的可擴(kuò)展性和統(tǒng)一性,所有的控制算法實現(xiàn)了一個統(tǒng)一的接口,供算法運行模塊調(diào)用。
具體來講,是采用模塊化設(shè)計的思路,將dcs的控制算法分解成若干個功能獨立的、能分別設(shè)計、編碼和調(diào)試的算法模塊,組成控制算法庫。每個算法模塊完成的功能既明確又單純,從而使處理的問題局部化和簡單化。算法模塊作為控制組態(tài)仿真軟件結(jié)構(gòu)中的最基本元素,實際上就是完成一個特定算法功能的獨立程序。算法模塊的接口簡明而又統(tǒng)一,且能彼此隔離和獨立。從用戶角度看來,控制算法庫中的各種控制算法都是完全一樣的,而且系統(tǒng)也是采用統(tǒng)一的接口對各種算法進(jìn)行調(diào)用的,用戶無需關(guān)心每個控制算法的具體實現(xiàn)細(xì)節(jié)。另外,用戶使用時,只需對控制算法模塊的參數(shù)進(jìn)行修改,而無需修改算法模塊的代碼。
將各算法編成獨立的可反復(fù)調(diào)用的算法模塊,對應(yīng)每一個功能模塊都有一個參數(shù)列表和輸入列表,系統(tǒng)運行時,控制調(diào)度程序依據(jù)這些信息,順序依次執(zhí)行。
設(shè)計算法庫時,先設(shè)計一個算法基類cfunction,其中實現(xiàn)一個虛函數(shù)fun,具體算法從該類中派生。在程序中,采用統(tǒng)一調(diào)用各算法模塊的fun函數(shù)的方法實現(xiàn)對控制算法的調(diào)用,這樣的接口簡單明了。
2.4 虛擬信號發(fā)生器
信號發(fā)生器是一種應(yīng)用極為廣泛的儀器,它通常作為標(biāo)準(zhǔn)信號發(fā)生器,用于電子電路的性能試驗或參數(shù)測量。傳統(tǒng)的信號發(fā)生器價格昂貴、操作復(fù)雜、不易開發(fā)、維護(hù)和升級,而使用基于visual
c++編程工具,軟件開發(fā)的虛擬信號發(fā)生器,具有簡單、直觀、操作方便等特點,而且可以通過調(diào)用或修改信號源函數(shù)中的不同的功能函數(shù),得到不同的信號,如正弦波、方波、三角波等。
虛擬信號發(fā)生器即信號源模塊又分為三個子模塊,參數(shù)設(shè)置模塊,信號發(fā)生模塊,波形顯示模塊。如圖4所示。

圖4 虛擬信號發(fā)生器結(jié)構(gòu)圖
信號源數(shù)據(jù)的內(nèi)容主要為波形數(shù)據(jù)、要發(fā)生波形的參數(shù);其波形數(shù)據(jù)的來源主要有信號發(fā)生模塊;波形數(shù)據(jù)的終點是信號發(fā)生以及發(fā)生波形及其參數(shù)的顯示,以及提供給控制算法進(jìn)行模擬仿真運行。各子模塊間的關(guān)系及所對應(yīng)的數(shù)據(jù)流圖如圖5所示。
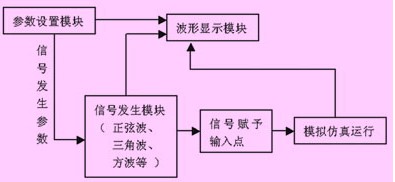
圖5 虛擬信號發(fā)生器數(shù)據(jù)流圖
信號源模塊能夠產(chǎn)生正弦波、三角波、方波等常用的波形,能夠?qū)σl(fā)生波形的各種參數(shù)進(jìn)行方便靈活的設(shè)置,能夠?qū)φl(fā)生的波形進(jìn)行實時顯示。注意,模擬的信號采集頻率與主控卡實際采集頻率相同,這樣才能保證對主控卡實際運行的模擬仿真等準(zhǔn)確。
在此信號源模塊中,用戶可設(shè)定兩種模式:自動和手動。自動時,采用系統(tǒng)提供的一些標(biāo)準(zhǔn)輸入信號類型。手動時,用戶可隨時直接設(shè)置邏輯和控制變量的值。這是在線仿真系統(tǒng)的運行的必要條件。
在此模塊中采用了多線程技術(shù),參考主控卡的采集周期,定時運行信號發(fā)生函數(shù)改變模擬輸入點的值。設(shè)置了手動改變數(shù)據(jù)的按鈕,用戶在手動模式下改變模擬輸入點的數(shù)據(jù)時,直接調(diào)用此按鈕的相應(yīng)函數(shù),執(zhí)行此改變。
3 模擬仿真運行
先對用戶組態(tài)的信息進(jìn)行檢查,看是否數(shù)據(jù)連接類型不匹配,是否回路斷開等,同時,對于圖形化組態(tài)平臺來說,如何根據(jù)控制回路圖的拓?fù)浣Y(jié)構(gòu)建立起控制組態(tài)信息的數(shù)據(jù)流是很重要的,也就是需對回路中的算法模塊執(zhí)行順序進(jìn)行排列,上述內(nèi)容都是編譯過程中的工作。檢查確定組態(tài)無誤后,利用虛擬信號發(fā)生器產(chǎn)生的信號,作為控制回路算法模擬仿真運行的輸入信號,運行控制算法,實時顯示仿真數(shù)據(jù),及仿真報警,并輸出仿真波形。這是一個可調(diào)試的仿真過程,用戶觀察仿真結(jié)果判斷對控制算法的組態(tài)是否滿足要求,若不滿足,則可“在線”調(diào)整算法功能模塊的參數(shù),甚至重新組態(tài),仿真和調(diào)試,直到仿真結(jié)果滿足指定要求。
在模擬仿真時也采用了多線程技術(shù)。開辟工作者線程,進(jìn)行控制算法的計算。為實現(xiàn)“在線”參數(shù)整定,在用戶修改參數(shù)時,再開辟一個工作者線程,這樣能提高程序的運行效率。
本軟件平臺采用johnson算法來解決循環(huán)有向子回路的排序,具體實施過程為:以當(dāng)前正在進(jìn)行拓樸結(jié)構(gòu)分析的模塊接口作探索出發(fā)點,用該接口的連線作為索引,沿該連線數(shù)據(jù)流方向深入,每深入一步,即將經(jīng)過的模塊接口進(jìn)行標(biāo)識,如果某一步達(dá)到了原出發(fā)點,則形成回路。因為在循環(huán)回路中,數(shù)據(jù)流在某個采用周期內(nèi)不存在時間序列上的優(yōu)先次序,因此需將回路人為斷開,并按上述索引的順序產(chǎn)生反映該循環(huán)回路特性的算法模塊的執(zhí)行順序。需要注意的是,該有向循環(huán)回路與不屬于該回路的其它部分則存在先后順序關(guān)系,這正是必須特別處理循環(huán)有向回路的原因。
實際運行和數(shù)據(jù)訪問根據(jù)控制組態(tài)信息通過tcp/ip下載到dcs系統(tǒng)的主控卡,并實際運行,這時組態(tài)軟件實時的向主控卡詢問各點信息(當(dāng)前值信息和故障信息),并寫入實時數(shù)據(jù)庫。而控制組態(tài)仿真軟件只是實時的訪問實時數(shù)據(jù)庫,從實時數(shù)據(jù)庫獲取點值信息等,再在控制組態(tài)的實際運行界面上實時顯示,同時,可顯示各回路的實際運行波形圖。工程人員通過人機(jī)界面來監(jiān)控各個控制回路的運行情況,可以在線進(jìn)行參數(shù)整定。
數(shù)據(jù)訪問模塊主要是用來給算法實際運行模塊提供一個簡單、統(tǒng)一的數(shù)據(jù)訪問接口。它通過ado訪問實時數(shù)據(jù)庫,讀出算法運行模塊需要顯示的實時數(shù)據(jù),實現(xiàn)實時顯示和報警。
設(shè)計時,創(chuàng)建流套接字與主控卡建立網(wǎng)絡(luò)連接,進(jìn)行通訊,下載控制信息。
4 結(jié)束語
控制組態(tài)仿真軟件為建模人員提供了一個友好的用戶界面,使建模人員在建模時不必對模塊內(nèi)部的控制、邏輯程序有很深的了解就可以方便的對其進(jìn)行編寫和修改,自動或手動改變各邏輯和控制變量的值,參與模擬仿真運行和調(diào)試,從而實現(xiàn)了對系統(tǒng)運行的仿真。采用仿真的方式,模擬控制算法的運行和故障的報警,既可縮短工期又可降低成本,還能降低硬件維護(hù)、培訓(xùn)和備品備件費用,具有很好的應(yīng)用前景。