
1 混合動力控制系統(tǒng)
實現(xiàn)混合動力車共有三個關鍵因素:能夠對汽車運行狀態(tài)詳細監(jiān)控的系統(tǒng);分析監(jiān)控系統(tǒng)所獲取的信息,并發(fā)出相應的控制命令;相比一般電子系統(tǒng),混合動力車電子控制系統(tǒng)工作在車內非常惡劣的環(huán)境,電磁干擾、振動、灰塵等都會造成技術上的瓶頸,如圖1所示。
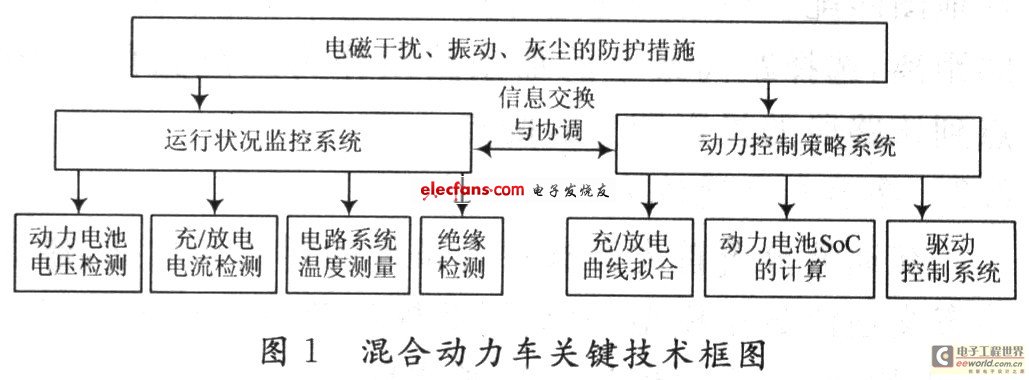
本文對混合動力車進行了研究,系統(tǒng)地分析了混合動力車的各個重要組成部分的核心技術,提出一種經(jīng)濟實用的混合動力車的控制系統(tǒng)的設計實例。該系統(tǒng)采用了先進的計算機技術和總線技術,集智能控制、信號采集、數(shù)據(jù)處理和通信于一體,控制實時性好,實現(xiàn)了整車控制智能化和多傳感器之間的有效融合。
2 動力控制策略系統(tǒng)
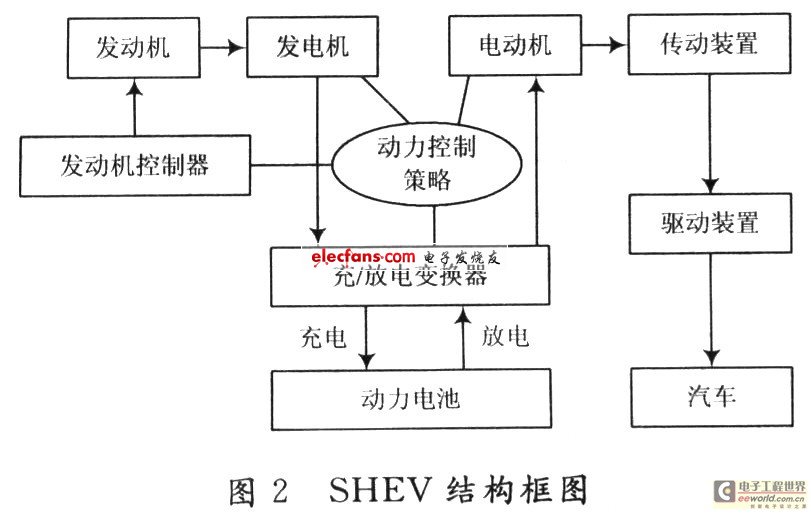
混合動力電動汽車由發(fā)動機和蓄電池共同提供動力,發(fā)動機和電動機可進行不同組合得到不同的驅動方案,如:串聯(lián)、并聯(lián)及混聯(lián)。整車性能的好壞不僅與發(fā)動機和電動機等部件有關,還與其控制策略和優(yōu)化方法有關。按照能源組合的方式,混合動力電動汽車可按動力驅動方式分為串聯(lián)式混合動力電動汽車(SHEV)和并聯(lián)式混合動力電動汽車(PHEV)。本文研究對象是SHEV。SHEV的特點適合城市行駛中頻繁起動、加速和低速運行工況,可使發(fā)動機在最佳工況點附近穩(wěn)定運轉,通過調整蓄電池和電動機的輸出來達到調整車速的目的,從而提高在復雜工況下行駛的車輛的燃油經(jīng)濟性,同時降低排放。在電池的荷電狀態(tài)(SOC)較高時還可以關閉發(fā)動機,只利用電機進行功率輸出,使發(fā)動機避免在怠速和低速工況下運行,提高發(fā)動機的效率,減少有害物質的排放。SHEV的結構如圖2所示。
混合動力車需根據(jù)不同的行車狀況,以及動力電池的實時參數(shù)來決定其相應的控制策略。“動力控制策略系統(tǒng)”分析和處理來自運行狀況監(jiān)控系統(tǒng)的數(shù)據(jù),判斷此時的電動機應該處于發(fā)動機工作模式、動力電池工作模式,或者是協(xié)同工作模式,然后發(fā)出相應的控制命令。研究表明,好的系統(tǒng)控制策略應是使發(fā)動機工作在其最大負荷的50 %~65%,同時需要兼顧汽車的動力性。策略控制的一個重要依據(jù)是動力電池的SOC值,當SOC值處于正常工作區(qū)(30%~75 %),動力電池放電電流處于20~65 A范圍內,如果此時駕駛員對汽車加速的要求低于30%,可采用動力電池驅動車輛。當駕駛員對加速的要求為30%~65%,可利用此時發(fā)動機釋放的多余能量給動力電池充電。當駕駛員對加速的要求為65%~80%,由發(fā)動機獨立驅動汽車,直到其最大輸出功率。當加速要求大于80%,可由發(fā)動機和動力電池同時驅動車輛。
另外,需考慮到動力電池安全性和壽命,當其SOC值變化超出了上述范圍,需及時合理地發(fā)出相應的控制命令。當SOC大于80%時,動力電池強制放電,控制系統(tǒng)需改變此時的動力混合度的比例,提高動力電池的占總輸出功率的比例,此時不再收回發(fā)動機產(chǎn)生的富裕能量。當SOC小于20%,動力電池進入強制充電模式,此時由發(fā)動機的輸出功率的一部分要用于動力電池充電,汽車此時完全由發(fā)動機驅動。
3 信號通道
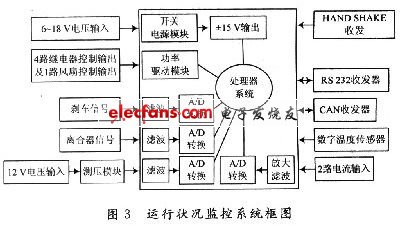
處理器系統(tǒng)將采集到的各種信號進行處理后,送至上層的動力策略控制系統(tǒng),并且上層的控制信號也要傳送至底層。本系統(tǒng)采用兩路CAN收發(fā)器完成這一任務。采用CAN總線技術,不僅組網(wǎng)自由,擴展性強,實時性好,可靠性高,而且具有自診斷和監(jiān)控能力,它是一種十分有效的通信方式。CAN總線具有以下特點:
(1)無破壞性地基于優(yōu)先權競爭的總線仲裁;
(2)可借助接收濾波的多地址幀傳送;
(3)具有錯誤檢測與出錯幀自動重發(fā)送功能;
(4)數(shù)據(jù)傳送方式可分為數(shù)據(jù)廣播式和遠程數(shù)據(jù)請求式。
另外,系統(tǒng)還具有一路RS 232收發(fā)器,主要用于設計過程中的調試和產(chǎn)品生產(chǎn)過程中的質量檢查。電池電壓和溫度的測量
動力電池電壓的測量方式取決于動力電池的具體情況,本系統(tǒng)采用鎳氫電池,可分為12組電池,每一組電池包括10節(jié)小電池,每節(jié)電池電壓1.2 V,所以每組電壓為12 V,總電壓為144 V。為確保測量系統(tǒng)適用于不同的工作狀況,尤其是考慮到充電時電池電壓會適當上升,特殊情況時電壓可能達到20 V,因此設計的測量范圍應為0~20 V。
溫度的測量采用數(shù)字溫度傳感器DS1860,這種傳感器可以采用多路傳感器,共一條數(shù)據(jù)線和一條電源線以及一條地線,具備操作簡單,占用輸入口少的優(yōu)點。
充放電電流測量
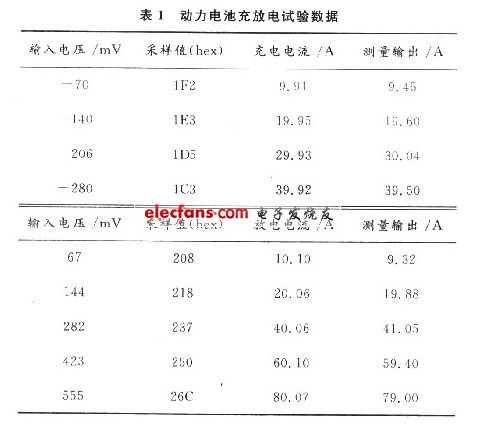
動力電池充放電的大電流的測量可采用兩種方式,最常見的就是采用霍爾傳感器。因此選擇合適的霍爾傳感器是精確測量電路的關鍵。霍爾傳感器的磁場靈敏度或者稱磁場的開起點要與電機型號和結構相匹配。不同的電機型號和不同的電機設計結構轉子磁場有不同的磁場分布和磁場分布漲落。如果霍爾傳感器的磁靈敏度太高或者太低,由于轉子磁鋼和磁鋼縫隙磁場分布的不規(guī)則漲落,會導致位置傳感器給出錯誤的信號。此外,還要考慮霍爾傳感器芯片的抗靜電能力,霍爾傳感器芯片的抗浪涌電壓或抗浪涌電流能力。本文研究的系統(tǒng)采用型號為UGN3503UA的霍爾傳感器。在測量電路的設計中需注意的是該傳感器的輸出為毫安級電流,因此必須選擇合適的輸入電阻將其轉化為電壓信號,并采用精度較高的放大、采樣電路。表1是本系統(tǒng)的一次實驗結果。
燃油成本的提高和人們環(huán)保意識的增強,使混合動力不再是高成本的代名詞。目前國內尚無自主產(chǎn)權的混合動力車型上市,因此本文對混合動力車的研究不僅為國內同行的研究工作提供了一些經(jīng)驗。