
在錄井儀器中,深度系統(tǒng)是最重要的部分,離開(kāi)了深度系統(tǒng)中的井深,儀器中大部分參數(shù)都將失去意義[1]。而在深度系統(tǒng)中,大鉤高度的測(cè)量是最為關(guān)鍵的。通過(guò)絞車(chē)信號(hào)的實(shí)時(shí)數(shù)據(jù)檢測(cè),可得到與大鉤高度相關(guān)的絞車(chē)脈沖信號(hào)計(jì)數(shù)值,將該值傳入上位機(jī),通過(guò)相應(yīng)的計(jì)算可以得到實(shí)時(shí)的井深。
同時(shí),基于太陽(yáng)能和蓄電池供電的無(wú)線錄井?dāng)?shù)據(jù)采集與傳輸系統(tǒng)要求現(xiàn)場(chǎng)絞車(chē)信號(hào)檢測(cè)電路必須具有低功耗、小尺寸和抗干擾性強(qiáng)的特點(diǎn)。因此,采用分離元器件所設(shè)計(jì)的傳統(tǒng)的絞車(chē)信號(hào)測(cè)量電路就不能滿足無(wú)線錄井系統(tǒng)的這些特殊要求。
美國(guó)Xilinx公司的CoolRunner II系列CPLD芯片XC2C64A結(jié)合XC9500系列的高速度、方便易用和XPLA3系列的超低功耗等優(yōu)點(diǎn),具有低功耗、高密度、在系統(tǒng)可編程和抗干擾能力強(qiáng)等特點(diǎn)[2],在一顆芯片上就可以代替多顆傳統(tǒng)邏輯芯片來(lái)實(shí)現(xiàn)復(fù)雜的組合與時(shí)序邏輯控制,能夠達(dá)到低功耗、小尺寸和抗干擾性強(qiáng)的優(yōu)良性能[3]。
無(wú)線錄井絞車(chē)信號(hào)檢測(cè)電路的設(shè)計(jì)與實(shí)現(xiàn)
絞車(chē)順時(shí)針旋轉(zhuǎn)時(shí), 傳感器輸出A相波形超前B相波形90°;逆時(shí)針旋轉(zhuǎn)時(shí),輸出A相波形滯后B相波形90°。其后的鑒相(方向鑒別)、倍頻和計(jì)數(shù)就是基于如上輸出的兩相脈沖信號(hào)。
絞車(chē)信號(hào)檢測(cè)電路的整體結(jié)構(gòu)(圖1),包括絞車(chē)信號(hào)的整形、隔離、鑒相、倍頻、計(jì)數(shù)和數(shù)據(jù)讀取接口等部分。
信號(hào)A和信號(hào)B是來(lái)自絞車(chē)傳感器的相位差90?的兩路脈沖信號(hào),先經(jīng)過(guò)第一次施密特整形,抑制現(xiàn)場(chǎng)干擾和線路衰減引起的脈沖波形畸變,轉(zhuǎn)換為標(biāo)準(zhǔn)的脈沖信號(hào);然后經(jīng)數(shù)字隔離器進(jìn)行電氣隔離,隔離電路一方面對(duì)后面的電路起保護(hù)作用,另一方面起電壓變換的作用,將信號(hào)轉(zhuǎn)換為3.3V標(biāo)準(zhǔn)電壓的脈沖信號(hào);再經(jīng)過(guò)第二次施密特整形電路進(jìn)行整形,此次整形的主要目的是將兩路脈沖信號(hào)的波形進(jìn)行變換,產(chǎn)生A、B、AA(A的反相)和BB(B的反相)四路信號(hào)。
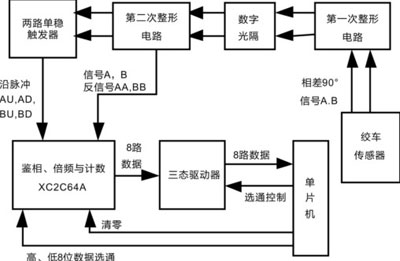
圖1 絞車(chē)信號(hào)檢測(cè)電路結(jié)構(gòu)框圖
經(jīng)第二次整形后,A、B兩路信號(hào)經(jīng)過(guò)單穩(wěn)態(tài)觸發(fā)器,在其上升沿和下降沿處分別進(jìn)行觸發(fā),得到四個(gè)窄脈沖信號(hào)AU、AD,BU、BD。
得到的A、B、AA、BB、AU、AD、BU、BD共8路信號(hào)輸入到CPLD XC2C64A,進(jìn)行倍頻、鑒相和計(jì)數(shù)等處理,并在單片機(jī)的控制下對(duì)數(shù)據(jù)進(jìn)行輸出或清零。
根據(jù)如上的設(shè)計(jì)原理,采用Xilinx公司的EDA軟件ISE和模塊化設(shè)計(jì)[4]的方法設(shè)計(jì)了無(wú)線錄井絞車(chē)信號(hào)的檢測(cè)電路,其頂層設(shè)計(jì)電路如圖2所示,該電路包括兩個(gè)子模塊:倍頻、鑒相子模塊jch_4f_dir,具有4倍頻和方向鑒別功能;16位二進(jìn)制可控加減計(jì)數(shù)與數(shù)據(jù)接口子模塊countud,具有加/減計(jì)數(shù)(由方向鑒別信號(hào)控制)和MCU選擇讀取高/低8位計(jì)數(shù)數(shù)據(jù)等功能。該電路在XC2C64A-7VC44I器件[5]上進(jìn)行了下載測(cè)試。
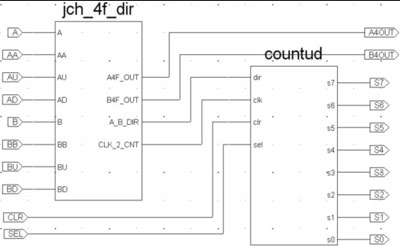
圖2 絞車(chē)信號(hào)四倍頻、鑒相與計(jì)數(shù)頂層電路圖
A、B、AA、BB、AU、AD、BU、BD共8路信號(hào)經(jīng)過(guò)如圖3中左側(cè)所示的倍頻電路,產(chǎn)生4倍頻的脈沖信號(hào),給后面的計(jì)數(shù)器提供計(jì)數(shù)時(shí)鐘信號(hào);如圖3中右上側(cè)所示的由與非門(mén)組成的RS觸發(fā)器,是鑒相(方向鑒別)電路,可以得到反映絞車(chē)傳感器A、B兩相信號(hào)到達(dá)先后的方向信號(hào)A_B_DIR。假設(shè)絞車(chē)正轉(zhuǎn),A超前B,A_B_DIR=1;絞車(chē)反轉(zhuǎn), B超前A,A_B_DIR=0。
鑒相(方向)信號(hào)A_B_DIR一方面連接到二選一數(shù)據(jù)選擇器的選擇輸入端S0,用來(lái)控制A4F_OUT和B4F_OUT選通到如圖2右側(cè)所示的計(jì)數(shù)器countud進(jìn)行計(jì)數(shù),當(dāng)A_B_DIR=1(A超前B)時(shí),clk=A4F_OUT(有脈沖輸出);當(dāng)A_B_DIR=0(B超前A)時(shí)clk= B4F_OUT(有脈沖輸出);同時(shí),A_B_DIR也控制計(jì)數(shù)器進(jìn)行加法(A_B_DIR=0)或減法(A_B_DIR=1)計(jì)數(shù)。
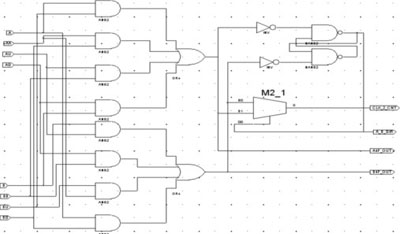
圖3 絞車(chē)信號(hào)四倍頻與鑒相電路圖
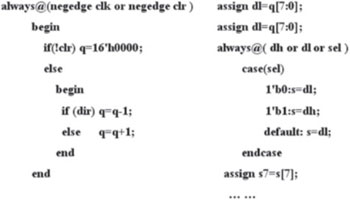
16位二進(jìn)制加/減計(jì)數(shù)器的主要功能設(shè)計(jì)描述如下所示(采用Verilog HDL)。其中,clk是計(jì)數(shù)時(shí)鐘輸入端,clr是異步清零端,dir是加減計(jì)數(shù)控制端:dir=1,減法計(jì)數(shù),dir=0,加法計(jì)數(shù);sel是計(jì)數(shù)數(shù)據(jù)讀取控制端,由單片機(jī)給出的選擇信號(hào)實(shí)現(xiàn)高8位、低8位的計(jì)數(shù)數(shù)據(jù)輸出,sel=0,低8位,sel=1,高8位。
無(wú)線錄井絞車(chē)倍頻、鑒相與計(jì)數(shù)電路的仿真測(cè)試
在Xilinx的ISE環(huán)境下對(duì)倍頻、鑒相子模塊jch_4f_dir的仿真波形圖示于圖4。該波形是絞車(chē)傳感器輸出B相波形超前A相波形90°時(shí)的仿真結(jié)果。此時(shí),倍頻輸出信號(hào)B4fout與A(或B)信號(hào)的頻率成4倍關(guān)系,鑒相(方向鑒別)輸出信號(hào)Dir=0,這與前面的原理分析完全一致。
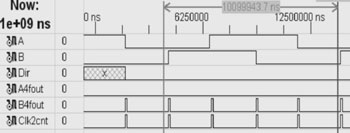
圖4 B超前A的四倍頻與鑒相輸出信號(hào)波形圖
在ModelSim XEIII環(huán)境下對(duì)絞車(chē)檢測(cè)頂層整體電路(包括倍頻、鑒相和計(jì)數(shù))的仿真波形圖示于圖5,該波形是絞車(chē)傳感器輸出B相波形超前A相波形90°時(shí)的仿真結(jié)果。此時(shí),倍頻輸出信號(hào)B4OUT與A(或B)信號(hào)的頻率成4倍關(guān)系,是計(jì)數(shù)器countud的時(shí)鐘輸入信號(hào);鑒相(方向鑒別)輸出信號(hào)A_B_DIR=0,即計(jì)數(shù)器的加減控制輸入信號(hào)dir=0,計(jì)數(shù)器加法計(jì)數(shù);單片機(jī)提供的數(shù)據(jù)讀取選擇信號(hào)SEL=0,選取16位計(jì)數(shù)器的低8位輸出,輸出的8位數(shù)據(jù)正是計(jì)數(shù)器按照四倍頻時(shí)鐘信號(hào)進(jìn)行加法計(jì)數(shù)的結(jié)果。
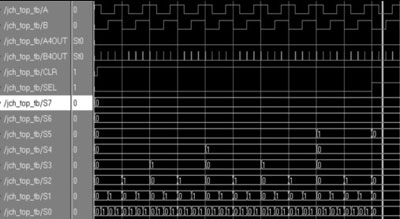
圖5 B超前A的絞車(chē)檢測(cè)輸出(倍頻、鑒相和計(jì)數(shù))波形圖
在錄井現(xiàn)場(chǎng),使絞車(chē)傳感器快速轉(zhuǎn)動(dòng)產(chǎn)生脈沖,經(jīng)過(guò)電路處理后,傳輸?shù)街骺貎x器房的工控機(jī)。在設(shè)計(jì)中考慮現(xiàn)場(chǎng)應(yīng)用情況,采集到的脈沖計(jì)數(shù)值是在一個(gè)初始值N的基礎(chǔ)上變化的(此處常使用30000,即0x7530),正轉(zhuǎn)/反轉(zhuǎn)變化脈沖數(shù)在此基礎(chǔ)上做加/減運(yùn)算。絞車(chē)傳感器轉(zhuǎn)動(dòng)一圈產(chǎn)生48個(gè)脈沖數(shù),現(xiàn)場(chǎng)試驗(yàn)數(shù)據(jù)分析表明,檢測(cè)電路對(duì)絞車(chē)轉(zhuǎn)動(dòng)圈數(shù)的測(cè)量非常準(zhǔn)確,誤差僅是0.01%。
結(jié)語(yǔ)
采用一片XC2C64A-7VC44I器件(64個(gè)宏單元,33個(gè)I/O口,工業(yè)級(jí)–40°C to +85°C)設(shè)計(jì)并實(shí)現(xiàn)了無(wú)線錄井絞車(chē)信號(hào)的檢測(cè)電路,完成了絞車(chē)信號(hào)的四倍頻、鑒相和16位二進(jìn)制加減計(jì)數(shù)以及與MCU數(shù)據(jù)讀取接口等綜合功能。錄井生產(chǎn)實(shí)際應(yīng)用表明,該設(shè)計(jì)簡(jiǎn)化了系統(tǒng)結(jié)構(gòu),降低了系統(tǒng)功耗,從而提高了系統(tǒng)整體性能,在無(wú)線錄井?dāng)?shù)據(jù)采集與傳輸系統(tǒng)中,應(yīng)用效果很好。
參考文獻(xiàn):
[1] 秦紅祥. 綜合錄井技術(shù)在鉆井工程中的應(yīng)用[J].西部探礦工程,2004,67(6):59-60
[2] CoolRunner-II CPLD Family Product Specification.http://direct.xilinx.com/bvdocs/publications/ds090.pdf
[3] 周海驕. 利用CoolRunner-II設(shè)計(jì)高性能系統(tǒng)[J].微電子技術(shù),2003,31(5):42-44
[4] 王誠(chéng)等.FPGA/CPLD設(shè)計(jì)工具-Xilinx ISE 5.x使用詳解.北京:人民郵電出版社,2003
[5] XC2C64A CoolRunner-II CPLD Product Specification.http://direct.xilinx.com/bvdocs/publications/ds311.pdf
作者:于云華 來(lái)源:電子產(chǎn)品世界