
汽車定位系統(tǒng)用于檢測汽車停車位置參數(shù)和車箱幾何參數(shù),為機(jī)械手在車箱范圍內(nèi)作業(yè)提供平面坐標(biāo)數(shù)據(jù),是車載貨物自動作業(yè)控制系統(tǒng)的組成部分。目前的汽車定位系統(tǒng)多用齒輪傳動的機(jī)械移位紅外線掃描方式或基于視頻圖像的人工畫界方式,前者定位速度慢,后者定位精度低,可靠性差,都難以滿足實(shí)際定位對速度、精度和可靠性的要求。文中采用紅外線電子移位逐行高速掃描技術(shù)和超聲波測距技術(shù)實(shí)現(xiàn)汽車定位,具有可調(diào)定位速度和適應(yīng)惡劣天氣的能力,還采用多種措施,提高系統(tǒng)的抗干擾能力和可維護(hù)性能,實(shí)現(xiàn)了快速、高精度、高可靠定位的目標(biāo)。利用Delphi開發(fā)主控軟件,實(shí)現(xiàn)數(shù)據(jù)處理,完成定位結(jié)果的顯示、輸出,工作參數(shù)設(shè)置和狀態(tài)檢測,具有良好的開放性,方便與各種控制系統(tǒng)接口。
1 工作原理和系統(tǒng)組成
1.1 工作原理
以透射式紅外光電傳感器和超聲波測距裝置相結(jié)合可實(shí)現(xiàn)對平面區(qū)域內(nèi)物體的定位。透射式紅外光電傳感器由紅外發(fā)射模塊和紅外接收模塊組成,當(dāng)收發(fā)模塊之間有物體遮擋光路時(shí),將改變接收模塊的接收狀態(tài),據(jù)此可非接觸探測物體是否存在。
如果把多個(gè)發(fā)射模塊和多個(gè)接收模塊按固定間隔平行排列成兩排,讓收發(fā)兩側(cè)對應(yīng)位置上的紅外模塊一對一對地按順序輪流接通工作,對其間區(qū)域進(jìn)行逐行掃描探測,則依據(jù)掃描結(jié)果不但可判斷該區(qū)域是否有物體存在,還可計(jì)算出物體的長度及其在該區(qū)域中的縱向相對位置。
超聲波測距通常采用渡越時(shí)間法,收發(fā)頭與被測物體之間的距離:

式中,v為超聲波在介質(zhì)中的傳播速度;t為超聲波的往返時(shí)間間隔。分別在物體兩側(cè)標(biāo)定位置安裝超聲波測距裝置,測出與物體的距離,就可計(jì)算出物體的寬度及其在該區(qū)域中的橫向相對位置。
1.2 系統(tǒng)組成
圖1為基于聲光探測的汽車定位系統(tǒng)的組成。
圖中單片機(jī)1、紅外發(fā)射陣列、紅外接收陣列和電子移位電路構(gòu)成紅外線電子移位逐行掃描電路,用于車箱長度和縱向停車位置的測量。單片機(jī)2和4個(gè)超聲波測距裝置構(gòu)成的測距系統(tǒng),用于車箱寬度和橫向停車位置的測量。
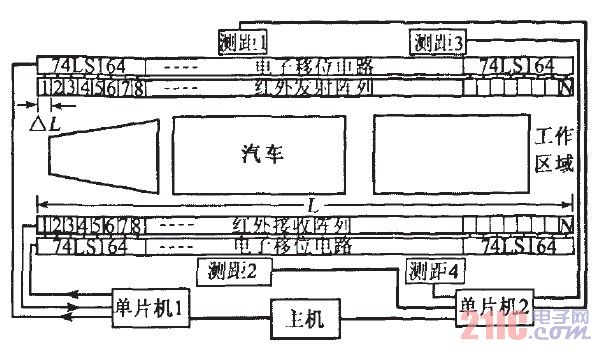
圖1 系統(tǒng)組成
其中紅外發(fā)射陣列和紅外接收陣列安裝于工作區(qū)域兩側(cè)車箱中部的高度,分別由N個(gè)發(fā)射模塊和N個(gè)接收模塊組成,它們均勻平行排列,收發(fā)一一對應(yīng)。4個(gè)超聲波測距裝置安裝在工作區(qū)域兩側(cè),分成兩組,分別測量前部車箱和后部車箱。
主機(jī)對縱向檢測和橫向檢測的數(shù)據(jù)進(jìn)行綜合處理和分析,判斷出工作區(qū)是否有車、哪種車型,并計(jì)算出汽車在區(qū)域中的停車位置參數(shù)和車箱幾何參數(shù)。
2 紅外線電子移位逐行掃描電路設(shè)計(jì)和調(diào)試
2.1 電路設(shè)計(jì)
圖2為紅外線電子移位逐行掃描電路。圖中只畫出一對紅外發(fā)射和接收模塊的電路,并略去脈沖發(fā)生器電路。脈沖發(fā)生器產(chǎn)生38 kHz的振蕩信號,經(jīng)過低頻脈沖調(diào)制后,送入發(fā)射模塊。紅外發(fā)射模塊的電子開關(guān)在控制信號為高電平時(shí)導(dǎo)通,把脈沖發(fā)生器送來的信號發(fā)射出去;紅外接收模塊的電子開關(guān)也在控制信號為高電平時(shí)導(dǎo)通,把紅外接收頭的接收狀態(tài)輸出,送至單片機(jī)1。電子移位電路由74LSl64串聯(lián)組成,有N個(gè)輸出端子,每一個(gè)輸出端子控制一個(gè)紅外模塊。開關(guān)信號是一個(gè)高電平脈沖,每個(gè)移位時(shí)鐘周期向前移動一位。由于收發(fā)兩側(cè)移位時(shí)鐘同步,所以,收發(fā)兩側(cè)對應(yīng)位置上的紅外模塊會一對一對地按順序輪流接通工作,由此達(dá)到電子移位逐行掃描的目的。
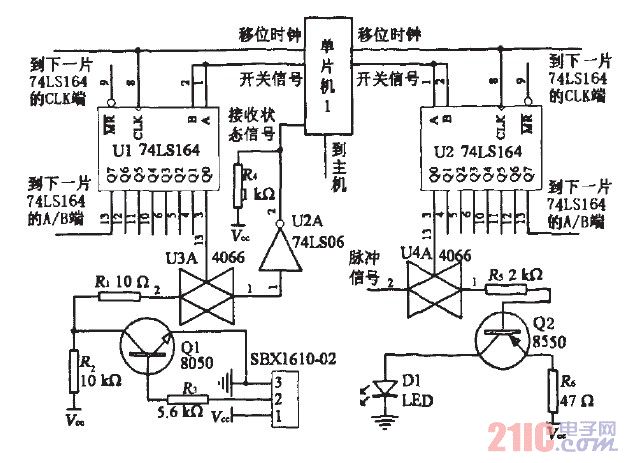
圖2
2.2 掃描速度和精度處理
掃描速度主要取決于移位時(shí)鐘的周期出,完成一次掃描的時(shí)間:

該電路中在△f≥2 ms時(shí),具有良好的接收可靠性。單片機(jī)l通過程序控制,可使△t一2~10 ms,以滿足不同掃描速度的需要。
紅外陣列中,相鄰模塊間距△Z就是縱向的最高定位精度。根據(jù)工作區(qū)域的縱向最大長度L的要求確定紅外陣列中模塊數(shù)量N,要求N×A/=L。
由于紅外陣列由N個(gè)功能相同的紅外模塊串聯(lián)而成,所以在制作時(shí),以5~10個(gè)模塊做成一個(gè)電路板組件,并采用插拔式安裝結(jié)構(gòu),各個(gè)組件電路相同,可相互替換、任意串聯(lián),既能滿足不同工作區(qū)長度的要求,也可盡量減少現(xiàn)場更換故障模塊所需的時(shí)間。
現(xiàn)場安裝時(shí),需要分段校準(zhǔn),避免誤差累積。
掃描強(qiáng)度處理
在大霧或強(qiáng)降雨天氣,紅外線穿透能力下降,降低了紅外掃描的可靠性,通常以加大紅外發(fā)射功率來解決。為此,紅外掃描設(shè)置了普通、增強(qiáng)和超強(qiáng)三種掃描強(qiáng)度模式。普通模式的紅外掃描,紅外收發(fā)是“一對一”工作,同時(shí)只有1個(gè)紅外模塊發(fā)射,每次移動1位;增強(qiáng)模式的紅外掃描,紅外收發(fā)變?yōu)?ldquo;一對二”工作,同時(shí)有2個(gè)相鄰紅外模塊發(fā)射,每次移動1位;超強(qiáng)模式的紅外掃描,紅外收發(fā)變?yōu)?ldquo;一對三”工作,同時(shí)有3個(gè)相鄰紅外模塊發(fā)射。很顯然,后兩種模式的紅外發(fā)射功率分別是第一種模式的2倍和3倍。后兩種掃描模式的定位精度會有所降低,但最多不超過2△L。
2.4 紅外抗干擾處理
由于定位裝置在室外場地工作,在電路設(shè)計(jì)上應(yīng)考慮對日光等背景紅外線的抗干擾措施。具體采取了3項(xiàng)措施:
(1)封閉接收頭。將接收頭置于帶窗口箱體中,避免日光對其直接照射。
(2)動態(tài)紅外線發(fā)射。日光等背景紅外線一般不會有巨烈波動,因此,對紅外線進(jìn)行脈沖調(diào)制,以動態(tài)紅外線發(fā)射效果較好。
(3)選用抗干擾接收頭。電路采用了抗干擾能直射日光紅外線干擾中有效檢出紅外線信號。為達(dá)到SBXl6i0—02接收頭最佳工作點(diǎn),脈沖發(fā)生器產(chǎn)生的振蕩信號頻率應(yīng)在(38±0.5)kHz之間。
2.5 大跨度電子移位電路開關(guān)信號丟失處理
電子移位電路通常由約100片74LSl64串聯(lián)組成,電路長達(dá)數(shù)10 m,由于分布參數(shù)的影響,造成各片74LSl64的移位時(shí)鐘信號CLK的不同步,極易導(dǎo)致開關(guān)信號在移位過程中丟失,使掃描“半途而廢”。為此,對各片74LSl64的移位時(shí)鐘信號CLK,應(yīng)采用并聯(lián)驅(qū)動,并保證各片74LSl64的時(shí)鐘信號處于同一個(gè)驅(qū)動級上,同時(shí)盡量減小電路阻抗,提高驅(qū)動電路的功率。
3 測距系統(tǒng)電路設(shè)計(jì)和調(diào)試
圖3為測距系統(tǒng)電路。該電路由1個(gè)單片機(jī)和4組超聲波收發(fā)單元組成,圖中只畫出了一組超聲波收發(fā)單元。發(fā)射單元由40 kHz振蕩器和門電路構(gòu)成。門電路產(chǎn)生占空比很小的低頻脈沖信號,脈沖持續(xù)時(shí)間為160 its,脈沖間隔為30~50 ms(視需要調(diào)整)。此脈沖信號一路作為振蕩器的置位脈沖;另一路送給單片機(jī),作為計(jì)時(shí)器的起始脈沖。在置位期間,振蕩器輸出經(jīng)調(diào)制的頻率為40 kHz的脈沖信號,由超聲波發(fā)射頭T40-16發(fā)射出去。回波的接收采用通用的FPS409I紅外接收組件,只是需要把紅外接收管PH302換為超聲波接收頭R40—16,這樣在有效的測距范圍,可保證接收到的信號其輸出達(dá)到TTL電平。接收信號經(jīng)整形放大后送入單片機(jī),作為計(jì)時(shí)器的停止脈沖。單片機(jī)計(jì)算起始脈沖至停止脈沖之間的時(shí)間t,按照式(1)求出距離s。
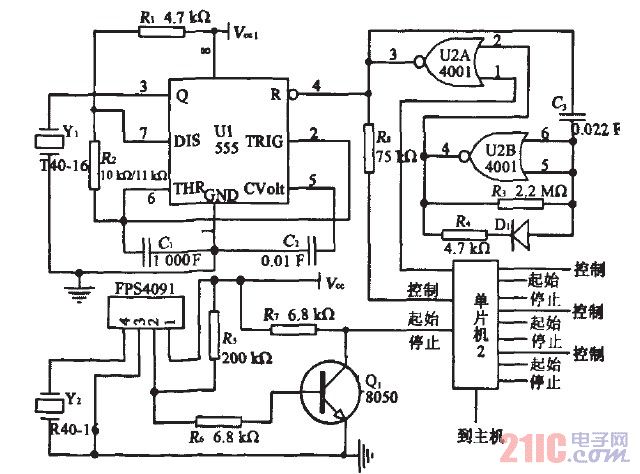
圖3 測距系統(tǒng)電路
測距系統(tǒng)采用了“一拖四”的結(jié)構(gòu),為避免多組超聲波單元互相干擾,它們應(yīng)在單片機(jī)控制下輪流工作。該電路中脈沖間隔為30~50 ms,對應(yīng)測距范圍約為5~15 m,如果測距范圍加大,需要增大脈沖間隔。另外,該測距電路存在約30 cm的測距盲區(qū),測距裝置與測量對象間要保持30 cm以上的距離,同時(shí)單片機(jī)對起停脈沖計(jì)時(shí)時(shí),也要避開盲區(qū)內(nèi)虛假停止脈沖的干擾。
4 控制軟件設(shè)計(jì)
控制軟件包括主機(jī)軟件和單片機(jī)軟件,主要軟件流程如圖4所示。單片機(jī)1產(chǎn)生紅外線電子移位逐行掃描電路所需的開關(guān)信號和移位時(shí)鐘,并在每個(gè)移位時(shí)鐘周期采集一次接收狀態(tài)數(shù)據(jù),完成一遍掃描后把數(shù)據(jù)上傳給主機(jī);還可根據(jù)主機(jī)指令,通過程序控制改變掃描速度和掃描強(qiáng)度。單片機(jī)2分別控制檢測4個(gè)超聲波裝置,所計(jì)時(shí)間經(jīng)簡單處理后上傳給主機(jī)。由于存在盲區(qū),要避開此區(qū)間過來的虛假停止脈沖的干擾,采用延時(shí)開中斷,即在起始脈沖啟動計(jì)時(shí)器計(jì)時(shí)后,等待盲區(qū)過去再開中斷,使單片機(jī)中斷口接收到實(shí)際有效停止脈沖停止計(jì)時(shí)器計(jì)時(shí)。主機(jī)程序以主動查詢方式輪流從兩個(gè)單片機(jī)讀取縱向檢測數(shù)據(jù)和橫向檢測數(shù)據(jù),然后依照一定算法,對檢測數(shù)據(jù)進(jìn)行處理、分析,先判斷是否有車,有車時(shí)判斷車型、計(jì)算停車位置參數(shù)和車箱幾何參數(shù)。
主機(jī)軟件采用Delphi編寫,能進(jìn)行測量參數(shù)顯示和工作參數(shù)設(shè)置。
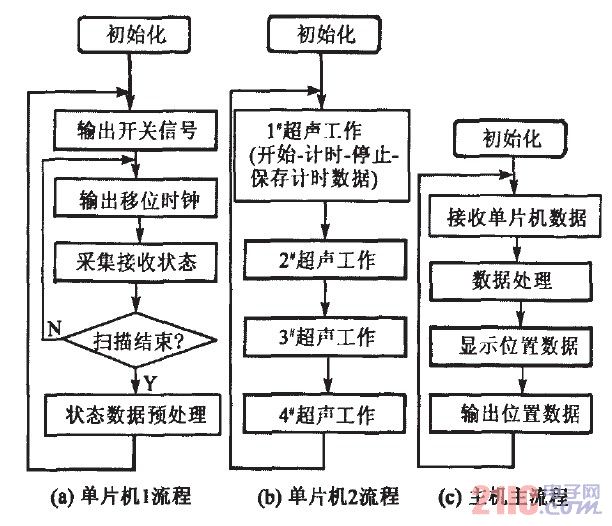
圖4 主要軟件流程
5 測試與結(jié)果
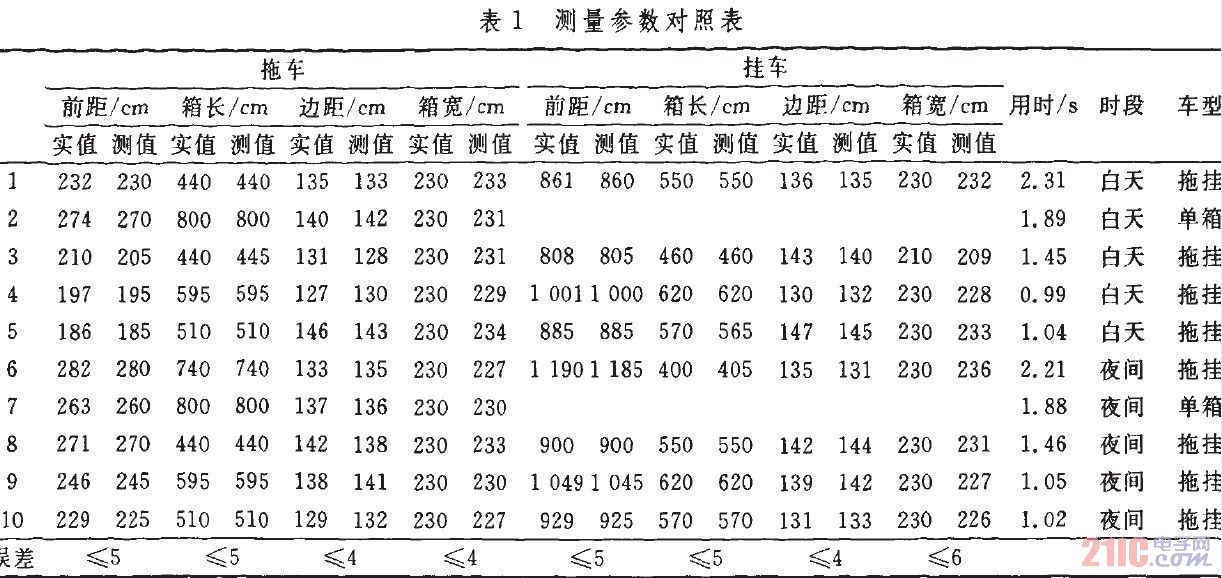
測試在室外工業(yè)現(xiàn)場進(jìn)行。工作區(qū)為5 m×21 ITI,紅外模塊的間距為5 cm,紅外收發(fā)陣列的模塊數(shù)均為425。連續(xù)對100輛汽車進(jìn)行定位,包括多種車型,都定位成功。在白天和夜間各抽取5輛汽車的定位數(shù)據(jù)與實(shí)物數(shù)據(jù)進(jìn)行現(xiàn)場比對,結(jié)果如表1所示。車箱長度和前距測量誤差不超過5 cm,車箱寬度和邊距測量誤差不超過6 cln,單次定位時(shí)間最快可達(dá)1 s內(nèi)。
6 結(jié)語
結(jié)果表明,采用聲光探測技術(shù)可實(shí)現(xiàn)平面內(nèi)物體的非接觸定位。基于聲光探測的汽車定位系統(tǒng),不論是定位速度、定位精度還是定位可靠性,都較當(dāng)前的其他定位方式有明顯的提高。目前該系統(tǒng)已被用于汽車物料自動取樣控制系統(tǒng)中,在多個(gè)鋼鐵電力企業(yè)得到應(yīng)用,運(yùn)行效果良好。