
摘 要: 介紹了旋轉(zhuǎn)變壓器-數(shù)字轉(zhuǎn)換器AD2S83在伺服系統(tǒng)中的應(yīng)用,重點(diǎn)介紹了該器件與主控芯片DSP(TMS320F240)的接口電路設(shè)計(jì)。
關(guān)鍵詞: 伺服系統(tǒng) 旋轉(zhuǎn)變壓器-數(shù)字轉(zhuǎn)換器
在伺服系統(tǒng)中,需要實(shí)時(shí)地檢測出電機(jī)轉(zhuǎn)子的位置,包括轉(zhuǎn)子的絕對(duì)位置和增量式位置,同時(shí)還需檢測出電機(jī)的速度,以實(shí)現(xiàn)對(duì)電機(jī)的轉(zhuǎn)矩、速度、及其驅(qū)動(dòng)的機(jī)構(gòu)的位置的高精度控制。
在電機(jī)轉(zhuǎn)子位置的檢測中,旋轉(zhuǎn)變壓器由于其具有堅(jiān)固耐用,能夠提供高精度的位置信息等突出優(yōu)點(diǎn),而獲得越來越廣泛的應(yīng)用。由于旋轉(zhuǎn)變壓器的輸出是包含著位置信息的模擬信號(hào),需對(duì)其處理并將其轉(zhuǎn)化成對(duì)應(yīng)的包含著位置信息的數(shù)字量,才能與單片機(jī)或DSP等控制芯片接口。這就需要設(shè)計(jì)相應(yīng)的信號(hào)轉(zhuǎn)換電路或者使用專用的旋轉(zhuǎn)變壓器—數(shù)字轉(zhuǎn)換器來實(shí)現(xiàn),后者由于有功能強(qiáng)、可靠性高、使用方便等優(yōu)點(diǎn)而被廣泛采用。筆者在最近開發(fā)的基于DSP的數(shù)字式伺服系統(tǒng)中,選用了美國AD公司的旋轉(zhuǎn)變壓器-數(shù)字轉(zhuǎn)換器AD2S83,實(shí)現(xiàn)了電機(jī)位置信號(hào)實(shí)時(shí)檢測的數(shù)字化,取得了滿意的效果。
1 AD2S83芯片簡介
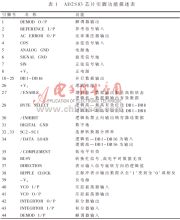
1.1 AD2S83芯片引腳功能介紹
AD2S83芯片引腳功能描述見表1。
1.2 AD2S83芯片的特點(diǎn)
AD2S83芯片是AD公司生產(chǎn)的跟蹤式旋轉(zhuǎn)變壓器-數(shù)字轉(zhuǎn)換器(R/D轉(zhuǎn)換器),它具有以下特點(diǎn):
(1) 允許用戶自己選擇適合的的分辨率。AD2S83提供有10位、12位、14位或16位的分辨率,用戶可根據(jù)需要,通過外圍器件的不同連接選用不同的分辨率。
(2) 通過三態(tài)輸出引腳輸出并行的二進(jìn)制碼來表征位置信息,因而很容易與單片機(jī)或DSP等控制芯片接口。
(3) 采用比率跟蹤轉(zhuǎn)換方式,使之能連續(xù)輸出位置數(shù)據(jù)而沒有轉(zhuǎn)換延遲并具有較強(qiáng)的抗干擾能力和遠(yuǎn)距離傳輸能力。
(4) 用戶可通過外圍阻容元件的選擇,改變轉(zhuǎn)換的動(dòng)態(tài)性能,如帶寬、最大跟蹤速率等。
(5) 具有很高的最大跟蹤速度,10位分辨率時(shí)的最大跟蹤速度為1040轉(zhuǎn)/秒。
(6) 能提供高精度的速度信號(hào)輸出。AD2S83能提供與轉(zhuǎn)速成正比的模擬信號(hào),其典型的線性度達(dá)到±1%,回差小于±0.3%,可代替測速發(fā)電機(jī)的功能。
由此可見,采用AD2S83不但可以將旋轉(zhuǎn)變壓器輸出的模擬位置信號(hào)轉(zhuǎn)換成數(shù)字位置信號(hào),而且同時(shí)還可以得到高精度的速度信號(hào),能夠很好地滿足數(shù)字式交流伺服系統(tǒng)中對(duì)交流電機(jī)的位置及速度反饋信號(hào)的要求。
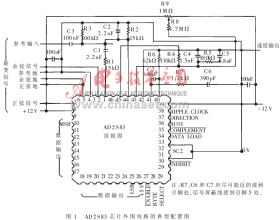
1.2 AD2S83芯片外圍電路的典型配置
圖1給出了采用12位分辨率時(shí)AD2S83芯片外圍電路的典型配置圖,其中的各電阻和電容的值是在參考頻率為5 kHz,帶寬為520 Hz,最大跟蹤速度為260 rps 情況下算出的。用戶可根據(jù)自己的實(shí)際情況選擇合適的值,具體計(jì)算方法見參考文獻(xiàn)[1]。
2 AD2S83芯片在伺服系統(tǒng)中的應(yīng)用
筆者在所設(shè)計(jì)的伺服系統(tǒng)中,用DSP 作為主控芯片,用AD2S83芯片將旋轉(zhuǎn)變壓器輸出的模擬位置信號(hào)轉(zhuǎn)換成并行的數(shù)字位置信號(hào),然后由DSP將數(shù)字位置信號(hào)讀入并進(jìn)行處理。這里重點(diǎn)介紹AD2S83芯片與DSP的接口設(shè)計(jì)。
2.1 常規(guī)接口設(shè)計(jì)的分析
按常規(guī),把AD2S83作為DSP的一個(gè)外設(shè),不論AD2S83芯片的內(nèi)部處于什么狀態(tài),當(dāng)DSP需要讀入位置信號(hào)時(shí),就通過其I/O口向AD2S83芯片的 引腳施加低電平信號(hào),從而阻止了鎖存器的刷新,等待一段時(shí)間后,便可讀取數(shù)據(jù)。這種方式下的讀取數(shù)據(jù)時(shí)序圖如圖2所示。
引腳施加低電平信號(hào),從而阻止了鎖存器的刷新,等待一段時(shí)間后,便可讀取數(shù)據(jù)。這種方式下的讀取數(shù)據(jù)時(shí)序圖如圖2所示。
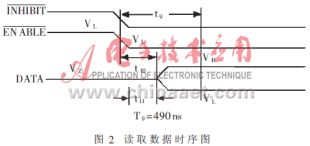
由圖2可知,在這種方式下,DSP向 引腳施加低電平信號(hào)后,也須等待t9=490ns,才能讀入有效數(shù)據(jù)。這對(duì)于指令周期只有50ns的DSP來說,需要等待近10個(gè)指令周期,這對(duì)于實(shí)時(shí)控制系統(tǒng)來說是難以接受的,而且這樣做還需要增加較為復(fù)雜的硬件等待電路。
引腳施加低電平信號(hào)后,也須等待t9=490ns,才能讀入有效數(shù)據(jù)。這對(duì)于指令周期只有50ns的DSP來說,需要等待近10個(gè)指令周期,這對(duì)于實(shí)時(shí)控制系統(tǒng)來說是難以接受的,而且這樣做還需要增加較為復(fù)雜的硬件等待電路。
2.2 直接讀取數(shù)據(jù)的接口設(shè)計(jì)
由于常規(guī)的接口設(shè)計(jì)不但需要較長的等待時(shí)間,
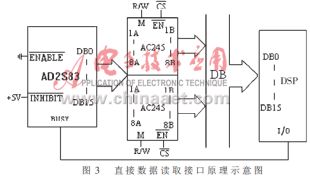
而且需要增加外圍硬件電路,我們采用了直接讀取數(shù)據(jù)的接口設(shè)計(jì)方案。在這種方案中,我們舍棄了上述方案中利用芯片內(nèi)部的三態(tài)門直接與DSP數(shù)據(jù)總線接口的方法,因?yàn)樵谶@種方案中,時(shí)延的產(chǎn)生與三態(tài)門的數(shù)據(jù)需要時(shí)間穩(wěn)定有密切的聯(lián)系。因此,我們?cè)谒捎玫姆桨钢袑⑿酒挠嘘P(guān)引腳接到適當(dāng)?shù)碾娖缴希剐酒瑑?nèi)部的三態(tài)門始終處于通態(tài),三態(tài)門與DSP數(shù)據(jù)總線兩者之間通過兩片74AC245連接起來,這樣,當(dāng)DSP需要讀入位置信號(hào)時(shí),就可通過74AC245來直接讀取了,從而大大減少了讀取數(shù)據(jù)的等待時(shí)間,提高了伺服控制系統(tǒng)的實(shí)時(shí)性。其接口原理圖如圖3所示。圖中只示出了與讀取數(shù)據(jù)有關(guān)的信號(hào)的連接,其它的外圍器件及引腳的連接從略。在這種方案中,當(dāng)需要讀取位置數(shù)據(jù)時(shí),DSP首先不斷地查詢BUSY信號(hào),當(dāng)BUSY信號(hào)變?yōu)榈碗娖綍r(shí),就從74AC245中直接讀取數(shù)據(jù)即可。這種情況下,查詢BUSY信號(hào)的最大等待時(shí)間只有200 ns。這種方案與常規(guī)方案相比,不但明顯地減少了讀取數(shù)據(jù)的等待時(shí)間(至少減少一半多),而且在硬件上用2片廉價(jià)的74AC245取代了復(fù)雜的等待電路,因此,我們選擇了這種方案。
3 誤差分析及結(jié)論
采用直接數(shù)據(jù)讀取的接口方案,其最大誤差主要取決于以下兩者的最大值:
·當(dāng)DSP 讀取數(shù)據(jù)時(shí),BUSY信號(hào)正好為低電平,此時(shí)誤差取決于所采用的AD2S83的分辨率。由于我們采用的分辨率為12位,所以,誤差角為:
δ1= 3600°/212 =0.0879°
·當(dāng)DSP 讀取數(shù)據(jù)時(shí),BUSY信號(hào)正好為高電平,此時(shí)誤差取決于等待時(shí)間和電機(jī)的轉(zhuǎn)速,在我們所設(shè)計(jì)的伺服控制系統(tǒng)中,電機(jī)的額定轉(zhuǎn)速是6200 rpm,電機(jī)的極對(duì)數(shù)為2,等待時(shí)間為200ns,可算出最大的電氣誤差角為:
δ2= 0.2×10-6×(6200/60)×360°×2 =0.0149°
由此可見,最大的電氣誤差角也不過0.0879°,
這樣的誤差完全可以忽略!
在我們所設(shè)計(jì)的基于DSP的數(shù)字式伺服控制系統(tǒng)中,采用了這種直接數(shù)據(jù)讀取的接口方案。實(shí)踐證明,這種方案能夠?qū)崟r(shí)地讀取位置信息,而且接口簡單,是可行的。
參考文獻(xiàn)
1 Resolver-to-Digital Converter AD2S83 data manual.Analog Devices Inc.,1995.
2 TMS320C24x DSP Controllers Reference Set.TexasInstruments Incorporated,1997