摘要:本文介紹了一種采用磁鏈和開環(huán)速度估算器的轉(zhuǎn)子磁場定向的控制系統(tǒng),系統(tǒng)設計的的關鍵問題是磁鏈的觀測和速度的準確估算。在系統(tǒng)動態(tài)過程中,電機的一些定、轉(zhuǎn)子參數(shù)會隨著電機溫升和磁路飽和的影響而發(fā)生變化,是時變參數(shù),本文按照模型參考自適應系統(tǒng)構(gòu)造出參考模型和可調(diào)模型來實現(xiàn)了擴展卡爾曼濾波對磁鏈和電機轉(zhuǎn)速的估算,并成功應用此算法設計了一套DSP實驗控制系統(tǒng),實現(xiàn)了速度自適應識別。同時本文介紹了DSP實驗系統(tǒng)的硬件和軟件實現(xiàn)方法并對實驗結(jié)果進行了分析。模型試驗應用于1.0 kW的感應電機取得了較好的的控制效果。
關鍵詞:感應電機 自適應 無速度傳感器 DSP
1 前言
以轉(zhuǎn)子磁場定向的矢量控制系統(tǒng)已經(jīng)廣泛應用于高性能的工業(yè)場合,由于矢量控制需要轉(zhuǎn)速閉環(huán),因此很多情況下,人們是利用同軸安裝的速度傳感器測速。但是精密的速度傳感器價格較高,且在某些惡劣環(huán)境下無法安裝速度傳感器,因此近年來研究較多的是無速度傳感器矢量控制技術。對于無速度傳感器系統(tǒng),由于電機終端可測量的只有電壓和電流信號,因此轉(zhuǎn)速和轉(zhuǎn)子磁鏈只能通過電壓和電流計算得到。這種系統(tǒng)需解決兩個問題:轉(zhuǎn)速的估計和轉(zhuǎn)子磁鏈的觀測[1]。
2 異步電動機轉(zhuǎn)子磁場定向矢量控制的基本原理
2.1轉(zhuǎn)子磁場定向矢量控制基本原理
1971年德國人F.Blaschke提出“感應電機磁場定向的控制原理”,是人們首次提出矢量控制的概念,以后在實踐中經(jīng)過不斷改進,形成了現(xiàn)在普遍采用的矢量控制系統(tǒng)。磁場定向化了多變量強耦合的交流變頻調(diào)速系統(tǒng)的控制問題。
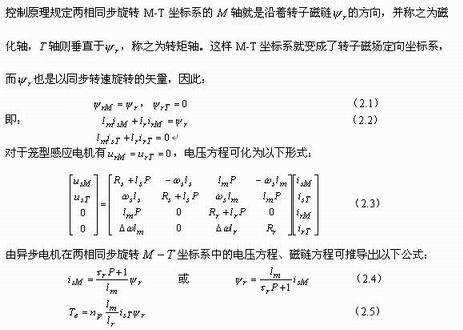

2.2無速度傳感器矢量控制的自適應轉(zhuǎn)速估計
為實現(xiàn)精確的速度反饋控制,必須能準確獲得電機的轉(zhuǎn)速信號,同時進行轉(zhuǎn)子磁鏈的準確觀測,也需要轉(zhuǎn)速反饋信號。在無速度傳感器矢量控制系統(tǒng)中,只能對電機的定子電流和電壓進行實時檢測,因此可以由定子電壓和電流進行計算得到轉(zhuǎn)速大小。在系統(tǒng)動態(tài)過程中,電機的一些定、轉(zhuǎn)子參數(shù)會隨著電機溫升和磁路飽和的影響而發(fā)生變化,是時變參數(shù),因此可以按照模型參考自適應系統(tǒng)構(gòu)造出參考模型和可調(diào)模型計算出電機轉(zhuǎn)速。
根據(jù)電機在兩相靜止坐標系中的Park方程和磁鏈方程,可以得到兩種形式的轉(zhuǎn)子磁鏈模型: 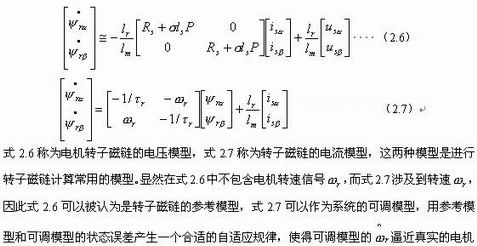


3 DSP系統(tǒng)的實現(xiàn)
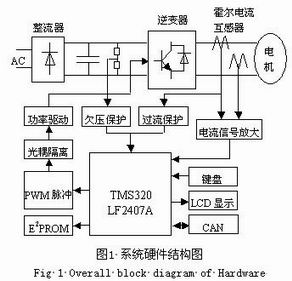
系統(tǒng)的硬件組成如圖1所示。控制核心系統(tǒng)選用微處理器TMS320LF2407A,它是為專門控制電機而設計的數(shù)字信號處理器,有12 路的PWM輸出,其內(nèi)核是16位的,具有4級流水線,頻率可達40MHz ,內(nèi)置有32K的FLASH ROM,本設計不需要另外加程序存儲器。電流檢測經(jīng)放大濾波后由DSP的10位A/D轉(zhuǎn)換為數(shù)字信號。
系統(tǒng)的部分驅(qū)動電路如圖2所示。算法生成的控制信號,由DSP的事件管理模塊的PWM1~PWM6輸出PWM信號,經(jīng)6N137高速光耦隔離,帶動IR的IR2132S輸出驅(qū)動ST公司的STGW20NB60KDIGBT實現(xiàn)交流電機的高性能控制。為提高系統(tǒng)的可靠性和抗干擾性,在系統(tǒng)設計中采用了光耦隔離和拉高、拉低等設計方法。 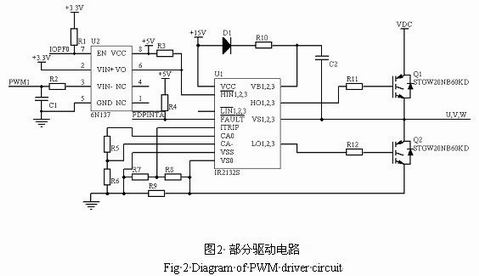
系統(tǒng)軟件的實現(xiàn)以前面推導的轉(zhuǎn)子磁場定向理論為基礎實現(xiàn),軟件主程序框圖如圖3所示,T1下溢中斷服務程序框圖如圖4所示。在實際工作中,由于逆變器的輸出電流中含有大量噪聲,且當模擬量經(jīng)過A/D 轉(zhuǎn)換器變?yōu)閿?shù)字量時會附加上轉(zhuǎn)換噪聲,因此,必須先對定子電流的實際測量值進行低通濾波。通過軟件實現(xiàn)擴展卡爾曼濾波對磁鏈和轉(zhuǎn)速的估計,以及空間矢量調(diào)制算法,獲得了令人滿意的實驗結(jié)果。證明擴展卡爾曼濾波算法對磁鏈和轉(zhuǎn)速的實時估計是非常準確的,由此構(gòu)成的無速度傳感器系統(tǒng)具有良好的靜、動態(tài)性能。 
4實驗結(jié)果
采用本文推導的控制算法設計的DSP實驗開發(fā)板,應用于一臺1.0Kw三相交流感應電機。實驗結(jié)果如圖所示:圖5為三相定子電流,圖6為電機轉(zhuǎn)速響應曲線。由實驗測的數(shù)據(jù)我們可知,采用本控制算法可以得到較好波形的三相正弦波,電機的相應速度快,超調(diào)小,能實現(xiàn)電機的高性能無速度傳感器控制。系統(tǒng)的硬件和軟件設計可靠實現(xiàn)了三相電機的控制。 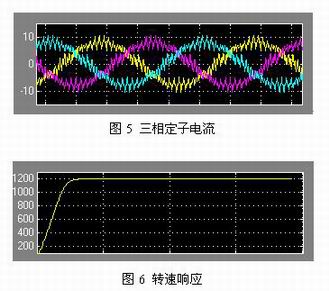
5 結(jié)論
綜上所述,無速度傳感器矢量控制無疑是今后的發(fā)展方向,對于矢量控制需要解決的關鍵問題是轉(zhuǎn)速估計和磁鏈觀測。不論是采用什么估計方法,對變量估計或觀測的準確性是至關重要的。如今隨著各種新的控制理論的提出,以及具有高速處理能力的微處理器的研制成功,計算的速度不再是限制控制算法的瓶頸,使得人們可以把最新的控制算法用于電機控制,不斷地提高矢量控制系統(tǒng)的各種性能。
