
語音控制系統(tǒng)硬件結(jié)構(gòu)圖" height:="" src="http://files.chinaaet.com/images/20110905/7719471a-83ce-4f0e-82e6-6dc9e488e318.jpg" />
圖1 系統(tǒng)硬件結(jié)構(gòu)圖
方案論證
主控模塊和語音處理模塊的選擇
較MCS-51系列單片機(jī)而言, SPCE061A單片機(jī)內(nèi)部集成有32KB的ROM、2KB的SRAM,更能滿足軟件對(duì)空間的要求,且不需要擴(kuò)展相關(guān)存儲(chǔ)器。另外,該類單片機(jī)完全支持C語言,軟件編寫比較方便,語音處理模塊采用凌陽的語音壓縮算法,也用軟件來實(shí)現(xiàn)。該單片機(jī)內(nèi)部集成有A/D、D/A轉(zhuǎn)換功能,方便實(shí)現(xiàn)語音錄放功能。
電機(jī)模塊的選擇
電機(jī)模塊選擇直流電機(jī)。與步進(jìn)電機(jī)相比較而言,直流電機(jī)具有轉(zhuǎn)速快、控制方便等特點(diǎn),更能夠滿足小車較高速行駛情況的要求,如圖2所示。
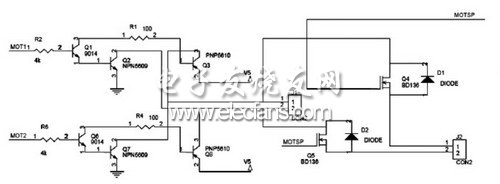
圖2 電機(jī)控制模塊原理圖
測路程方案的選擇
本文利用紅外對(duì)管來實(shí)現(xiàn)對(duì)小車的路程測量。在小車的車輪轉(zhuǎn)軸上安裝一個(gè)不透光轉(zhuǎn)盤,在轉(zhuǎn)盤邊緣均勻地打N個(gè)孔,當(dāng)紅外發(fā)射管發(fā)射的紅外光經(jīng)小孔照射到接收管時(shí),接收管的反向端電平將發(fā)生變化,單片機(jī)通過檢測這種電平的變化便可以自行計(jì)算出小車的運(yùn)行路程。紅外對(duì)管還具有體積較小、安裝較霍爾傳感器更方便、成本低等特點(diǎn)。
系統(tǒng)硬件結(jié)構(gòu)
語音控制小車的系統(tǒng)硬件結(jié)構(gòu)主要由兩部分組成:一部分是SPCE061A精簡開發(fā)板,另外一部分是電機(jī)控制板。SPCE061A精簡開發(fā)板為系統(tǒng)主控模塊,電機(jī)控制板則驅(qū)動(dòng)小車的前后兩個(gè)電機(jī)按系統(tǒng)的要求工作。
小車控制板主要包括接口模塊、電機(jī)控制模塊、預(yù)留傳感器接口以及電源模塊等幾部分。其中,電源模塊采用集成穩(wěn)壓芯片 L7805,在輸出端(控制板的JP11)并接了一個(gè)470μF的去耦電容和一個(gè) 0.1μF的濾波電容,增強(qiáng)了系統(tǒng)電壓的穩(wěn)定性和抗干擾性能。
電機(jī)控制模塊是整個(gè)控制板的核心部分,其根據(jù)61板的具體輸出信號(hào)啟動(dòng)或停止相應(yīng)的電機(jī),并調(diào)整電機(jī)的正反轉(zhuǎn)方向,實(shí)現(xiàn)小車的前進(jìn)、倒退等功能。后電機(jī)的控制電路包括方向控制和速度控制兩個(gè)單元,前電機(jī)的控制電路則只有方向控制單元。控制單元負(fù)責(zé)小車電機(jī)的正轉(zhuǎn)、反轉(zhuǎn)和停止三態(tài)控制。速度控制單元是擴(kuò)展單元,以適應(yīng)不同的場合需求。
紅外對(duì)管測小車運(yùn)行路程部分的原理圖如圖3所示。
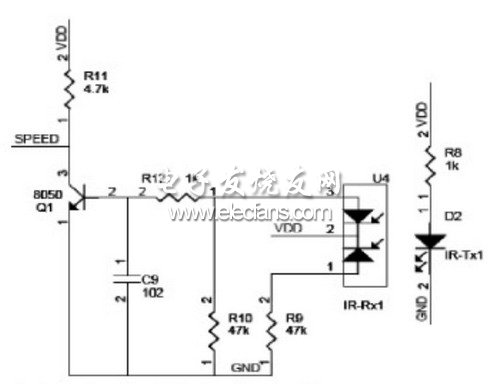
圖3 紅外對(duì)管電路原理圖
紅外發(fā)光管D2和接收管U4安裝在同一水平線上,發(fā)射管D2一直處于發(fā)射工作狀態(tài)。當(dāng)D2和U4間沒有被擋住,即D2發(fā)射的紅外線照射在U4上時(shí),U4的2腳和3腳導(dǎo)通,同時(shí)2腳和1腳也導(dǎo)通,此時(shí)晶體管Q1的基極電壓為Ub=VDD×R12/(R12R10),Q1導(dǎo)通,SPEED端近似于接地,呈低電平狀態(tài)。當(dāng)D2和U4間被擋住時(shí),即D2發(fā)射的紅外線不能照射在U4上時(shí),U4的2腳和3腳截止,同時(shí)2腳和1腳也截止,此時(shí)Q1的基極經(jīng)電阻R12和R10接地,即基極電壓為0V,此時(shí)Q1截止,SPEED端經(jīng)電阻R11接到VDD,呈高電平狀態(tài)。單片機(jī)通過檢測這種高低電平的變化來實(shí)現(xiàn)小車的路程測量。
軟件部分
主程序流程
小車的主程序流程圖如圖4所示,主要分為四部分:初始化部分、訓(xùn)練部分、識(shí)別部分和重訓(xùn)操作。
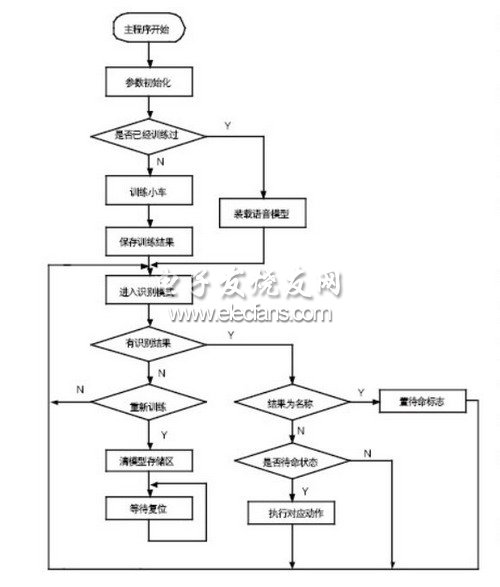
圖4 主程序流程圖
初始化部分的初始化操作會(huì)將SPCE061A單片機(jī)上的IOB13~IOB10設(shè)置為輸出端,用以控制電機(jī)。將其IOA的低8位IOA0~IOA7設(shè)置為下拉的輸入端,用來連接按鍵。
訓(xùn)練部分完成的工作是建立語音模型。程序一開始會(huì)判斷小車是否被訓(xùn)練過,如果沒有訓(xùn)練過,系統(tǒng)會(huì)要求對(duì)其進(jìn)行訓(xùn)練,并且會(huì)在訓(xùn)練成功之后將訓(xùn)練的模型存儲(chǔ)到Flash中;如果已經(jīng)訓(xùn)練過則會(huì)把存儲(chǔ)在Flash中的模型調(diào)出,裝載到辨識(shí)器中。
在識(shí)別環(huán)節(jié)當(dāng)中,如果辨識(shí)結(jié)果是名字,直接置待命標(biāo)志,然后等待動(dòng)作命令。只有檢測到待命標(biāo)志,小車才會(huì)根據(jù)相應(yīng)的辨識(shí)結(jié)果執(zhí)行動(dòng)作。如果沒有待命標(biāo)志,即使識(shí)別到動(dòng)作命令也不會(huì)執(zhí)行動(dòng)作。小車在執(zhí)行完對(duì)應(yīng)的命令之后清除待命標(biāo)志,結(jié)束待命狀態(tài)。
考慮到有重新訓(xùn)練的需求,這里設(shè)置了重新訓(xùn)練的按鍵。程序運(yùn)行時(shí)循環(huán)掃描該按鍵,什么時(shí)間檢測到此鍵按下,則將擦除語音模型存儲(chǔ)區(qū)首單元(0xe000)所在的頁,等待復(fù)位到來。復(fù)位后,程序重新從頭開始執(zhí)行,當(dāng)檢測到語音模型存儲(chǔ)區(qū)首地址為0xffff(擦除后的值)時(shí),系統(tǒng)會(huì)要求重新對(duì)其進(jìn)行訓(xùn)練。
FIQ中斷服務(wù)程序
FIQ中斷服務(wù)程序用來調(diào)用語音辨識(shí)子程序,并對(duì)a2000格式的語音進(jìn)行解碼播放。
調(diào)試及性能分析
系統(tǒng)的調(diào)試以程序?yàn)橹鳌S布{(diào)試時(shí),首先檢查電路的焊接是否正確,然后用萬用表測試或通電檢測。軟件調(diào)試則需要分別進(jìn)行主程序、FIQ中斷服務(wù)程序、顯示子程序等的編程及調(diào)試。本程序采用單片機(jī)匯編語言編寫,用KEIL uVision2編譯器編程調(diào)試。軟件調(diào)試直到語音能夠控制小車的行駛狀態(tài),并顯示出小車的行駛距離等功能為止。
結(jié)語
本文設(shè)計(jì)的語音控制系統(tǒng)主要采用16位單片機(jī)SPCE061A來實(shí)現(xiàn)。軟件編程則是采用C語言和匯編語言的混合編程來實(shí)現(xiàn)的,集兩種語言的優(yōu)點(diǎn)于一體,實(shí)現(xiàn)對(duì)硬件的實(shí)時(shí)控制。通過實(shí)驗(yàn)驗(yàn)證,該語音控制系統(tǒng)主要可實(shí)現(xiàn)以下功能:
(1)可以通過語音命令來控制小車的行駛狀態(tài),實(shí)現(xiàn)前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)等功能;
(2)顯示小車的運(yùn)行時(shí)間以及運(yùn)行路程;
(3)可以擴(kuò)展控制板的調(diào)速環(huán)節(jié),利用系統(tǒng)的PWM資源,實(shí)現(xiàn)小車的PWM調(diào)速;
(4)預(yù)留多路開關(guān)型傳感器接口,可以自行安裝各類傳感器,配合程序?qū)崿F(xiàn)小車的循跡、避障等功能。