
無線傳感器網(wǎng)絡將成百上千的傳感器節(jié)點布置在一個特定的區(qū)域內形成監(jiān)測網(wǎng)絡,這些節(jié)點通過特定的協(xié)議高效、穩(wěn)定、正確的組織起來,協(xié)同工作完成某項應用任務,達到數(shù)據(jù)采集、無線通信和信息處理的能力。無線傳感器網(wǎng)絡節(jié)點可以實時傳送監(jiān)測數(shù)據(jù),具有快速構建、部署方便的特點,不易受到目標環(huán)境的限制,因此在環(huán)境監(jiān)測、城市交通管理、醫(yī)療監(jiān)護、倉儲管理、汽車電子等領域有較好的應用。
在無線傳感器網(wǎng)絡中的節(jié)點通常是一個微型的嵌入式系統(tǒng),對采集數(shù)據(jù)、接收數(shù)據(jù)、處理數(shù)據(jù)、發(fā)送數(shù)據(jù)等的功能要求各有兼顧,其處理能力、存儲能力和通信能力都是對采集的數(shù)據(jù)進行管理和協(xié)同工作,因此傳感器網(wǎng)絡節(jié)點的軟硬件技術是傳感器網(wǎng)絡研究的重點。本文主要是對無線傳感器網(wǎng)絡節(jié)點數(shù)據(jù)的短距離接收進行設計探討。
二、接收節(jié)點工作原理
無線傳感器網(wǎng)絡數(shù)據(jù)接收節(jié)點模塊主要由接收芯片T5743和MCU微處理器PIC18F6620構成,如圖1,發(fā)射端采用ATMEL公司的的T5754做為數(shù)據(jù)發(fā)射芯片,與接收芯片T5743相匹配,以一定的發(fā)射接收頻率和數(shù)據(jù)傳輸速率協(xié)同工作。接收芯片T5743通過DATA串行雙向數(shù)據(jù)線與MCU微處理器PIC18F6620的I/O口進行通訊,MCU微處理器接收數(shù)據(jù)時,用DATA_CLK作為同步時鐘,微處理器PIC18F6620向接收芯片T5743發(fā)送指令時依靠特殊時序來達成數(shù)據(jù)接收和處理。接收過程用軟件控制的方式來進行數(shù)據(jù)傳送和實現(xiàn)對接收芯片T5743的控制,在接收數(shù)據(jù)之前,微處理器PIC18F6620通過DATA線將MUC內的程序寫入接收芯片的配置寄存器里,對接收芯片進行配置,隨后等待接收數(shù)據(jù);當有數(shù)據(jù)來時,由接收芯片T5743的LNA_IN端接入,經(jīng)低噪聲放大器放大后送入混頻器,使其變換成中頻;在中頻級,經(jīng)變換的信號在送入解調器之前被放大和濾波。
三、接收節(jié)點芯片
ATMEL的T5743芯片是集成UHF無線電接收模塊,帶有PLL鎖相環(huán)結構的接收芯片,采用SO20封裝。T5743芯片是為滿足低數(shù)據(jù)率、低成本RF數(shù)據(jù)傳輸系統(tǒng)的要求而開發(fā)出來的,其數(shù)據(jù)傳輸速度為1~10kB/s,編碼方式為曼切斯特或雙相位方式,可用于接收頻率范圍為300MHz~450MHz(433.92MHz和315MHz)的ASK數(shù)據(jù)傳輸;高靈敏度,全集成VCO,可實現(xiàn)低功耗功能,電源電壓4.5V~5.5V;單端RF輸出容易與天線或PCB版的印制天線相適配;工作溫度范圍為-40℃~105℃。
T5743芯片帶有一雙向串行數(shù)據(jù)接口DATA,通過DATA芯片可與MCU進行串行通訊,交換信息。它可以工作在2種典型頻率433.92MHz和315MHz,由MODE引腳來選擇,置高為433.92MHz,置低為315MHz,接收頻率在1kB~10kB之間可選,由軟件設定。設計中由于采用1MHz中頻與前端SAW濾波器相配合實現(xiàn)了高鏡像抑制,基于使新型SAW器件,達到了40dB抑制,并能用簡單的雙向數(shù)據(jù)線實現(xiàn)與微控制器的通信,利用單獨引腳經(jīng)微控制器實現(xiàn)電源管理。
T5743芯片的RF前端是一個超外差結構,將射頻輸入信號變換成1MHz IF信號。RF前端由低噪聲放大器LNA,本地振蕩器LO、混頻器和RF放大器組成。LO是由PLL鎖相環(huán)產(chǎn)生的載波頻率,供混頻器使用。RF信號經(jīng)RF輸入腳LNA-IN輸入,在433.92MHz時輸入阻抗為1000Ω/pF,在設計輸入網(wǎng)絡時首先考慮噪聲匹配,適當調整元件值和印制板的分布電感電容與輸入端的匹配,達到T5743在高信噪比時靈敏度最高。這樣,從RF前端來的信號經(jīng)全集成4階IF濾波器濾波,達到334.92MHz的應用,中頻的中心頻率為l MHz。
設計中解調器的工作方式由寄存器OPMODE設置,邏輯“L”設置解調器為FSK方式;邏輯“H”設置解調器為ASK方式。在ASK方式使用了自動門限控制電路,它將檢測參考電壓設置在一個能獲得好信噪比的適當值上,這個電路也能有效抑制任何類型的帶內噪聲信號或競爭發(fā)射,如果S/N超過10dB即能很好檢測出數(shù)據(jù)信號。在FSK方式下,如果S/N超過2dB就能檢測出數(shù)字信號。
解調器的輸出信號,經(jīng)數(shù)字濾波器濾波后送到數(shù)字信號處理電路,數(shù)字濾波器的通帶與數(shù)據(jù)信號的特性相匹配。數(shù)字濾波器由1階高通和3階低通濾波器組成。高通濾波器的截止頻率fcu_DF由公式(1)決定。低通濾波器的截止頻率由所選波特率范圍(BR-Range)決定,BR-Range在OPMODE寄存器中設定,BR-Range的設置必須與波特率相適應。
無線傳感器網(wǎng)絡接收節(jié)點的數(shù)字電路和模擬濾波器的全部定時都是來自一個時鐘。這一時鐘周期TCLK是從晶體振蕩器經(jīng)分頻器得到的,分頻次數(shù)由MODE引腳端的邏輯狀態(tài)控制。晶體振蕩器的頻率是由RF輸入信號決定的,它也同時決定了本地振蕩器的頻率(fLO)。T5743芯片的工作狀態(tài)是由OPMODE和LIMIT的兩個15位RAM寄存器進行設置的,寄存器可由雙向DATA口編程。如果寄存器內容由于掉電而改變,這一狀態(tài)由一個稱為復位標識(RM)的輸出表示出來,在這種情況下的接收電路必須重新編程。在加電復位(POR)后,寄存器被置為默認模式,如果接收機工作默認模式,不需對寄存器編程。同樣,如果接收電路不是在復位方式,就會啟動相應的OFF指令編程;如果接收電路處在復位方式,相應的OFF指令編程不會被啟動,在DATA腳仍呈現(xiàn)復位標志。
四、接收節(jié)點電路
無線傳感器網(wǎng)絡接收節(jié)點芯片T5743是一個高度集成的PLL無線接收模塊,能夠接收并解調FSK調制的曼徹斯特編碼數(shù)據(jù),同時通過一個雙向數(shù)據(jù)口將其發(fā)送出去。該無線接收芯片通過一個智能的輪詢方式使接收節(jié)點在大部分時間處于休眠模式,只有在監(jiān)測到有效傳輸時,才會結束休眠模式轉換為接收模式,并將數(shù)據(jù)流傳送給控制器。這樣,可以最大限度地減少能量消耗。圖2為無線接收節(jié)點電路原理圖。
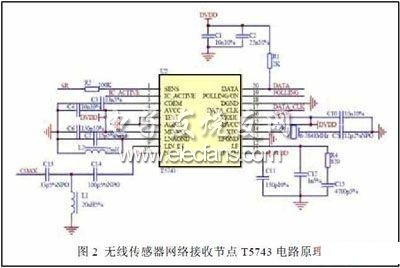
圖2中接收芯片的T5743的XTO是參考晶振的出入端,引腳LNA_IN提供RF到LNA輸入,設計采用的接收頻率為433.92MHz,所以fXTO=6.76438MHz,將MODE引腳設置為高電平,數(shù)據(jù)時鐘周期TCLK為2.0697μs。DATA引腳接到RB0引腳,DATA_CLK引腳接到RB2引腳,POLLING引腳接到RC7引腳,IC_ACTIVE引腳接到RF1引腳,至此完成T5743與MCU微處理器PIC18F6620的連接。
接收芯片的T5743的LF引腳連接一個帶寬為100kHz的無源環(huán)路濾波器。LNA_GND引腳的電感L為25nH,L是饋電電感,以建立供電DC通路。C7與L一起形成串聯(lián)諧振電路。LNA_IN引腳連接天線,中間部分為T型匹配網(wǎng)絡。
五、數(shù)據(jù)傳輸誤碼率測試
對無線傳感器網(wǎng)絡接收節(jié)點接收數(shù)據(jù)有效性的測試,必須通過驗證系統(tǒng)的性能進行,在一定距離內進行系統(tǒng)通信測試時,判斷數(shù)據(jù)傳輸?shù)目煽啃院陀行浴T趯W(wǎng)絡接收節(jié)點的T5743芯片完成輸入輸出波形和電路邏輯的時序檢測后,將無線網(wǎng)絡接收節(jié)點與PC機相連,改變發(fā)射端與接收端之間的距離,測試通訊距離及相應的誤碼率。設計中將發(fā)射端以5kB的數(shù)據(jù)速率發(fā)送20062120133~20062240266均勻遞增的測試數(shù)據(jù),誤碼測試程序將接收到的數(shù)據(jù)與自己生成的數(shù)據(jù)序列(20062120133~20062240266)同步、對比測得誤碼率。表1為接收節(jié)點的數(shù)據(jù)誤碼率測試結果。
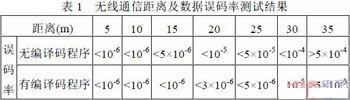
在通信距離及通信誤碼率測試過程中,5m~10m通信距離中外界干擾對系統(tǒng)的影響較小,甚至人為制造的電磁干擾對其通信誤碼率影響也較小,接收節(jié)點能夠穩(wěn)定有效的工作;10m~30m的通信距離,外界的干擾對系統(tǒng)的影響較大,接收節(jié)點通信誤碼率上升,但仍能滿足通訊要求,接收節(jié)點工作性能出現(xiàn)間或不穩(wěn)定;大于30m以上系統(tǒng)工作不穩(wěn)定,通信誤碼率上升很快,接收節(jié)點已不能滿足通信數(shù)據(jù)傳輸要求。
六、結論
本設計實現(xiàn)了對傳感器采集數(shù)據(jù)的無線接收,在短距離無線通信中能夠有效、準確的接收數(shù)據(jù),減少誤碼率的發(fā)生。