
隨著現(xiàn)代汽車的快速發(fā)展,汽車電子設(shè)備不斷增加,,傳統(tǒng)的接線方式已遠遠不能滿足汽車愈加復(fù)雜的控制系統(tǒng)要求,,汽車控制局域網(wǎng)CAN總線應(yīng)運而生,它廣泛應(yīng)甩于汽車電子控制系統(tǒng)中,,也是唯一一個成為國際標準的汽車局域網(wǎng),。
目前,由于環(huán)境污染和能源危機問題日益嚴重,,電動汽車的發(fā)展開始得到各國的高度重視,,成為未來汽車發(fā)展的主流方向。電動汽車主要具有三大關(guān)鍵技術(shù):驅(qū)動控制系統(tǒng),、電池電源,、整車電子控制系統(tǒng)。整車電子控制系統(tǒng)必須滿足純電動汽車的設(shè)計理念,,使之既節(jié)能又簡單可靠,。在目前電池技術(shù)水平下,解決兩大關(guān)鍵技術(shù),,有助于電動汽車在中國首先市場化,,其經(jīng)濟意義不言而喻。 電動汽車動力系統(tǒng)結(jié)構(gòu)復(fù)雜多樣,,部件類型繁多,。先進高效的控制體系結(jié)構(gòu),可以使電動汽車各動力系統(tǒng)之間的數(shù)據(jù)交換滿足簡單迅速,、可靠性高,、抗干擾能力強、實時性好,、系統(tǒng)錯誤檢測和隔離能力強等要求,。
本文設(shè)計了一種基于CAN總線的電動汽車整車電子控制系統(tǒng),,本系統(tǒng)采用短幀的報文結(jié)構(gòu),數(shù)據(jù)傳輸時間短,,具有很強的抗干擾性,,具有高效的非破壞總線仲裁,出錯檢測和故障自動關(guān)閉等優(yōu)點,。
1 控制系統(tǒng)整體結(jié)構(gòu)
電動車控制系統(tǒng)由電池管理,、充電機、電動機和整車控制等模塊組成,。本系統(tǒng)總體結(jié)構(gòu)如圖1所示,。

由圖1知,CAN通信網(wǎng)絡(luò)上共有4個通信節(jié)點,。整車控制器接收BMS,、CCS、電機控制器的報文提供的各種參數(shù),;充電機接收BMS發(fā)送的控制信息并根據(jù)報文數(shù)據(jù)的電壓電流設(shè)置來工作,;電機控制器接收BMS發(fā)送的電池狀態(tài)信息設(shè)置來工作,同時電機控制器接收由整車控制器發(fā)送的控制信息并根據(jù)報文數(shù)據(jù)的轉(zhuǎn)矩設(shè)置來工作,。
2 CAN總線節(jié)點的硬件電路設(shè)計
CAN是ControllerAreaNetwork的縮寫,,是ISO國際標準化的串行通信協(xié)議。在當前的汽車產(chǎn)業(yè)中,,出于對安全性,、舒適性、方便性,、低公害,、低成本的要求,各種各樣的電子控制系統(tǒng)被開發(fā)了出來,。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類型及對可靠性的要求不盡相同,,由多條總線構(gòu)成的情況很多,線束的數(shù)量也隨之增加,。為適應(yīng)"減少線束的數(shù)量",、"通過多個LAN,進行大量數(shù)據(jù)的高速通信"的需要,1986年德國電氣商博世公司開發(fā)出面向汽車的CAN通信協(xié)議,。此后,,CAN通過ISO11898及ISO11519進行了標準化,現(xiàn)在在歐洲已是汽車網(wǎng)絡(luò)的標準協(xié)議?,F(xiàn)在,,CAN的高性能和可靠性已被認同,并被廣泛地應(yīng)用于工業(yè)自動化、船舶,、醫(yī)療設(shè)備,、工業(yè)設(shè)備等方面。現(xiàn)場總線是當今自動化領(lǐng)域技術(shù)發(fā)展的熱點之一,,被譽為自動化領(lǐng)域的計算機局域網(wǎng),。它的出現(xiàn)為分布式控制系統(tǒng)實現(xiàn)各節(jié)點之間實時、可靠的數(shù)據(jù)通信提供了強有力的技術(shù)支持,。
整車控制節(jié)點是基于STM32F103VE設(shè)計的,。ARMCortex TM-M3是一款高性能、低成本,、低功耗的32位BISC處理器,,可在高達72 MHz的頻率下運行,擁有512 KB的片內(nèi)Flash程序存儲器,,具有64 KB的RAM數(shù)據(jù)存儲器,,可進行高性能的CPU訪問,。該徽控制器包含1個USB2.0全速(12 Mb/s)設(shè)備,、1路CAN2.0B通道、1個通用DMA控制器,、3個16位的A/D轉(zhuǎn)換器和1個16位的D/A轉(zhuǎn)換器,。同時該微控制器具有4個16位捕獲/比較定時器和1個看門狗定時器,因此ARM cortexTM-M3可以滿足電動車控制的需要,,減少了系統(tǒng)硬件設(shè)計的復(fù)雜度,。STM32F103VE支持J-Link實時仿真和跟蹤,內(nèi)部搭載有1通道的支持CAN20.B規(guī)格的CAN控制器,,使得CAN通信模塊的設(shè)計更加方便,。整車控制節(jié)點硬件電路圖如圖2所示,由徽控制器STM32F103VE,、CAN總線收發(fā)器82C250,、2個高速光耦16N137等組成。
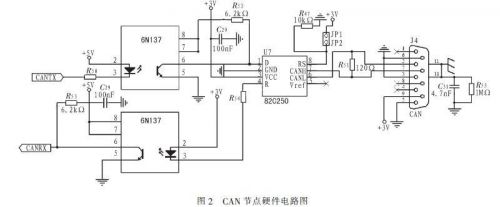
STM32F103VE采用單電源供電,,時鐘由8 MHz外部晶振產(chǎn)生,。對Flash存儲器的編程通過J-Link進行編程(IAR)實現(xiàn)。STM32F103VE內(nèi)部集成一路CAN控制器,,簡化了傳統(tǒng)單片機外接CAN控制器和CAN收發(fā)器的復(fù)雜外圍電路,。收發(fā)器82C250是CAN控鑭器和物理總線之問的驅(qū)動器接口,它可以提供對總線的差動發(fā)送能力和對CAN控制器的差動接收能力,,其位速度高達1Mb/s,與ISO11898標準兼容,。它的斜率控制功能使電磁兼容性能增強,準備模式可以減少網(wǎng)絡(luò)的功耗,,準備模式中,,網(wǎng)絡(luò)一旦檢測到總線上有報文就會被立即激活,。同時,它可提供更強抗干擾能力,,以及有熱保護,、短路保護、支持多達110個節(jié)點等好處,。
在微控制器和CAN總線收發(fā)器之間,,采用了2個高速光電耦合器6N137進行電氣隔離,防止將總線干擾引入系統(tǒng),,提高了系統(tǒng)的可靠性,。同時,在節(jié)點端部接有1個120 Ω終端匹配電阻,,提高了數(shù)據(jù)通信的抗干擾性,。
3 CAN通信協(xié)議的設(shè)計
根據(jù)ISO/OSI模型,CAN總線規(guī)范了只制定了數(shù)據(jù)鏈路層中的媒體訪問子層和一小部分的邏輯鏈路控制子層,,CAN的ISO標準規(guī)定了總線及驅(qū)動器的電氣特性,。因此需要根據(jù)自己的需求設(shè)計通信協(xié)議。
CAN協(xié)議標準2.0B的數(shù)據(jù)幀的ID長度為29位,,為擴展格式數(shù)據(jù)幀結(jié)構(gòu),,如圖3所示。

數(shù)據(jù)幀由幀起始,、仲裁段,、控制段、數(shù)據(jù)段,、CRC段,、ACK段、幀結(jié)束組成,。協(xié)議的設(shè)計是對標識符和數(shù)據(jù)位的定義,。
本系統(tǒng)協(xié)議的設(shè)計參照SAEJ1939協(xié)議標準,標識符分配為優(yōu)先級(P),、保留位(R),、數(shù)據(jù)頁(DP)、代碼域(PF),、目標域(PS),、源地址(SA)和數(shù)據(jù)域(DF)7個部分。根據(jù)需求定義了5個報文,,報文標識符定義如表1所示,。
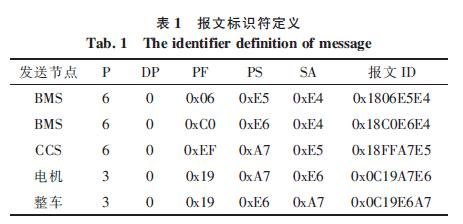
整車控制器的節(jié)點地址為OxA7;BMS節(jié)點地址為OxE4;CCS節(jié)點地址為OxE5;電機控制器節(jié)點地址為OxE6.
根據(jù)實際需求,設(shè)計了5個報文,分別為:BMS發(fā)給CCS和電機控制器的2個報文,,CCS和電機控制器發(fā)給整車控制器的2個報文,,整車控制器發(fā)給電機的報文。根據(jù)信息的重要程度,,將電機控制器和整車控制器間的報文設(shè)計為最高優(yōu)先級3,其他報文優(yōu)先級設(shè)計為6.
4 CAN總線節(jié)點的軟件設(shè)計
系統(tǒng)采用基于C語言的程序設(shè)計,。在IAB開發(fā)環(huán)境下進行調(diào)試和仿真。整車控制節(jié)點的軟件設(shè)計主要包括4個部分:CAN控制器的初始化,、報文發(fā)送,、報文接收和錯誤處理。
4.1 CAN控制器的初始化
在啟動CAN通信前必需進行CAN模塊的初始化,,包括硬件使能,、CAN工作模式設(shè)置、總線波特率設(shè)置,、設(shè)置中斷,、驗收過濾器設(shè)置等。初始化操作在CAN模塊復(fù)位的模式下進行,。初始化程序流程圖如圖4所示,。

本設(shè)計中采用的是29位擴展標示符,符合CAN2.0B的標準,,所以在驗收屏蔽過濾器設(shè)置中進行相應(yīng)的設(shè)定,。同時,,本設(shè)計的CAN波特率設(shè)置為250 Kb/s,與總線上其他節(jié)點的波特率相同,,才能進行正常的通信。
4.2 數(shù)據(jù)的發(fā)送
對CAN數(shù)據(jù)的發(fā)送采用查詢方式,,提高處理器的效率,,STM32F103VE的CAN模塊有3個發(fā)送郵箱,發(fā)送報文的流程為:應(yīng)用程序選擇一個空發(fā)送郵箱,;設(shè)置標識符,,數(shù)據(jù)長度和待發(fā)送數(shù)據(jù);對CAN+TixR寄存器的TXRQ位置1,請求發(fā)送,;一旦CAN總線進入空閑狀態(tài),,發(fā)送郵箱中的報文則立即發(fā)送,成功發(fā)送后,,郵箱為空,;通過查詢CAN_TSR寄存器的TXOK位來查詢報文是否發(fā)送成功。數(shù)據(jù)發(fā)送程序的流程圖如圖5所示,。

4.3 數(shù)據(jù)的接收
對CAN報文的接收采用中斷方式,,提高通信的實時性。接收報文的流程如圖6所示。當CAN總線發(fā)來一個報文,,根據(jù)屏蔽過濾器設(shè)置的標識符進行過濾,,如果是要接收的報文,則CAN控制器將總線上的報文按順序存入接收FIFO,并進入接收中斷,,在中斷中對接收FIFO中的報文進行存儲,,然后釋放FIFO郵箱。如果不釋放郵箱,,當總線上再發(fā)送過來報文時,,會直接覆蓋上一個報文,從而導(dǎo)致報文丟失,。數(shù)據(jù)接收程序流程如圖6所示,。

4.4 錯誤處理
電動車的整車控制器需要接收BMS、CCS和電機控制器這3個節(jié)點發(fā)來的報文,,如果超過1 s未接收到例如BMS的報文,,則通信鏈路超時,此時需要進行故障處理,。所以在軟件設(shè)計時,,定義一個全局變量,在每個定時周期中加1,在接收BMS報文中斷中,,對此變量清零,,則可以實現(xiàn)通信超時檢測。當總線發(fā)生嚴重故障時,,CAN節(jié)點錯誤寄存器累積到一定次數(shù)時,,CAN控制器會關(guān)閉總線,節(jié)點脫離總線,。
5 結(jié)論
在實車實驗中,,各個節(jié)點可以實現(xiàn)可靠的數(shù)據(jù)通信,可以實現(xiàn)電動車的加減速和勻速運行,。在本電動車控制系統(tǒng)中,,設(shè)計的CAN通信節(jié)點體積小、功耗低,、處理能力強,、抗干擾性好,能在電磁環(huán)境復(fù)雜的環(huán)境中穩(wěn)定,、可靠地工作,。在電動車控制系統(tǒng)中可實現(xiàn)數(shù)據(jù)的實時快速通信,可靠性強,。