
本文給出在μPD78045F上采用軟件模擬方式,使用2個I/O口線和一個8位定時器實現(xiàn)異步串行UART功能的方法。本方法占用資源少,設(shè)置和使用簡單方便,幀格式可自由改變。
設(shè)計思路
每一個UART都應(yīng)具備如下功能:
異步串行發(fā)送和接收的基本單位是幀,通常每幀包括以下部分:
本設(shè)計中,發(fā)送采用主動查詢方式,可使用任一輸出端口,本文中將P12.1設(shè)置為輸出口,作為TxD;由于異步通訊中接收是被動的和隨機(jī)的,因此只能采用中斷方式,P0.1是外部中斷INTP1的外部引腳,設(shè)計中使用它作為RxD,設(shè)置為下降沿觸發(fā)方式,可及時檢測到起始位的邏輯0電平,進(jìn)入中斷處理程序進(jìn)行數(shù)據(jù)接收。
波特率發(fā)生器使用8位定時器TM1,產(chǎn)生指定波特率下的1個發(fā)送/接收位時序長度,即“位定時”。UART的并行數(shù)據(jù)到串行數(shù)據(jù)的轉(zhuǎn)換、每幀數(shù)據(jù)格式的生成、發(fā)送和接收功能都由軟件來控制完成。在指定波特率下,位定時為1,000,000ms / 波特率,硬件系統(tǒng)采用fx=4.9152 MHz的主晶振,軟件設(shè)置定時器計數(shù)時鐘為4分頻,即:fx/4=1.2288 MHz ,達(dá)到指定波特率位定時常數(shù)為:1228800 / 波特率 。常用的波特率對應(yīng)的位定時常數(shù)列在表1中。

以下設(shè)置通訊參數(shù)為9600波特率,1位起始位,6位數(shù)據(jù)位,發(fā)送順序從MSB到LSB,偶校驗,2位停止位。
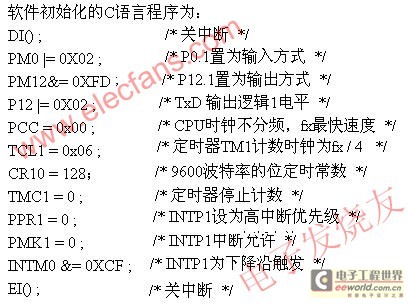

圖1 發(fā)送過程流程圖
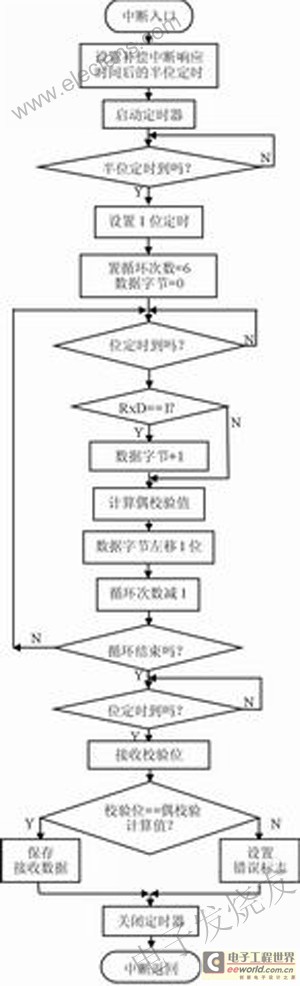
圖2 接收過程流程圖
軟件流程
發(fā)送
發(fā)送過程采用主動查詢方式完成,為保證每個發(fā)送位的時長相同,整個過程關(guān)閉中斷。首先,設(shè)定定時器定時一位時長,啟動定時器,關(guān)閉中斷,開始一幀的發(fā)送;然后,在發(fā)送一位時長的低電平(起始位)后,按最高位在先的順序依次發(fā)送6個數(shù)據(jù)位,同時計算偶校驗位,并在數(shù)據(jù)位后發(fā)送;最后,發(fā)送2位時長高電平作為停止位,結(jié)束一幀的發(fā)送。關(guān)閉定時器,開放中斷,發(fā)送過程結(jié)束。發(fā)送流程見圖1。
接收
接收過程是在中斷處理程序中完成的。中斷是由下降沿觸發(fā)的,進(jìn)入中斷的時刻是處在接收起始位的時段。為了保證接收準(zhǔn)確,在檢測到起始位后,不能在每一位時長的開始而應(yīng)在其中間進(jìn)行采樣。進(jìn)入中斷程序后,首先通過設(shè)定定時器,等待一位半時長,跳過整個起始位和半時長的首個數(shù)據(jù)位,然后開始按最高位在先的協(xié)議接收六個時長的數(shù)據(jù)位,每接收一位進(jìn)行串并轉(zhuǎn)換和校驗位計算;隨后接收校驗位并與計算機(jī)結(jié)果比較,確定是否接收正確。出于簡化程序,校驗位接收完畢后,沒有讀取停止位。最后關(guān)閉定時器,結(jié)束接收過程,中斷返回。
在μPD78045F的中斷系統(tǒng)中,高優(yōu)先級中斷的響應(yīng)時間最長32個CPU時鐘,這些時延應(yīng)在程序中進(jìn)行補(bǔ)償,尤其在高速率通訊時位定時時長很短,補(bǔ)償尤為重要。補(bǔ)償?shù)姆椒ㄊ菑奈欢〞r中減去最長時延32個時鐘。在9600波特率、定時器 4分頻計數(shù)情況下,應(yīng)減去 32/4=8個定時器計數(shù)。接收中斷處理流程見圖2。
結(jié)語
本文介紹的軟件UART實現(xiàn)方法,已在項目中實際應(yīng)用,達(dá)到功能要求,工作穩(wěn)定可靠。從以上方案可以看出,本方法的最高波特率可達(dá)38400,每一幀的格式可靈活改變,其中數(shù)據(jù)位長度和發(fā)送順序均沒有限制,可根據(jù)需要發(fā)送數(shù)十位的數(shù)據(jù)位。