
引 言
隨著嵌入式設(shè)備的快速發(fā)展,嵌入式設(shè)備的功能和靈活性要求越來(lái)越高,很多嵌入式設(shè)備中都開(kāi)始使用操作系統(tǒng)。由于工作的特殊性,很多嵌入式設(shè)備要求系統(tǒng)對(duì)外部事件的中斷響應(yīng)必須在事先設(shè)定的時(shí)限范圍內(nèi)完成,使系統(tǒng)具有可預(yù)測(cè)性,而通用的桌面操作系統(tǒng)大都是非實(shí)時(shí)或者是軟實(shí)時(shí)的,無(wú)法滿足需求,因此就必須使用實(shí)時(shí)操作系統(tǒng)(Real-Time Operating System,RTOS)。
實(shí)時(shí)操作系統(tǒng)(RTOS)是指當(dāng)外界事件或數(shù)據(jù)產(chǎn)生時(shí),能夠接受并以足夠快的速度予以處理,其處理的結(jié)果又能在規(guī)定的時(shí)間之內(nèi)來(lái)控制生產(chǎn)過(guò)程或?qū)μ幚硐到y(tǒng)作出快速響應(yīng),并控制所有實(shí)時(shí)任務(wù)協(xié)調(diào)一致運(yùn)行的操作系統(tǒng)。因而,提供及時(shí)響應(yīng)和高可靠性是其主要特點(diǎn)。實(shí)時(shí)操作系統(tǒng)有硬實(shí)時(shí)和軟實(shí)時(shí)之分,硬實(shí)時(shí)要求在規(guī)定的時(shí)間內(nèi)必須完成操作,這是在操作系統(tǒng)設(shè)計(jì)時(shí)保證的;軟實(shí)時(shí)則只要按照任務(wù)的優(yōu)先級(jí),盡可能快地完成操作即可。我們通常使用的操作系統(tǒng)在經(jīng)過(guò)一定改變之后就可以變成實(shí)時(shí)操作系統(tǒng)。
實(shí)時(shí)系統(tǒng)又有軟實(shí)時(shí)系統(tǒng)(soft real-time system)和硬實(shí)時(shí)系統(tǒng)(hard real-time system)之分。軟實(shí)時(shí)系統(tǒng)是指那些在系統(tǒng)負(fù)荷較重時(shí),允許發(fā)生錯(cuò)過(guò)時(shí)限(deadline)的情況而且不會(huì)造成太大危害的系統(tǒng),如電視會(huì)議系統(tǒng);而硬實(shí)時(shí)系統(tǒng)是指那些對(duì)每個(gè)任務(wù)的調(diào)度時(shí)間要求非常嚴(yán)格的系統(tǒng),如果不滿足時(shí)間限制的要求,則會(huì)給系統(tǒng)帶來(lái)毀滅性的后果。實(shí)時(shí)系統(tǒng)(Real-time operating system,RTOS)的正確性不僅依耐系統(tǒng)計(jì)算的邏輯結(jié)果,還依賴于產(chǎn)生這個(gè)結(jié)果的時(shí)間。實(shí)時(shí)系統(tǒng)能夠在指定或者確定的時(shí)間內(nèi)完成系統(tǒng)功能和外部或內(nèi)部、同步或異步時(shí)間做出響應(yīng)的系統(tǒng)。因此實(shí)時(shí)系統(tǒng)應(yīng)該在事先先定義的時(shí)間范圍內(nèi)識(shí)別和處理離散事件的能力;系統(tǒng)能夠處理和儲(chǔ)存控制系統(tǒng)所需要的大量數(shù)據(jù)。
在嵌入式系統(tǒng)領(lǐng)域,實(shí)時(shí)系統(tǒng)的核心是實(shí)時(shí)操作系統(tǒng)。目前已有很多商業(yè)實(shí)時(shí)操作系統(tǒng),著名的有WindRiver公司的VxWorks,其他的有QNX、pSOS+等。它們的優(yōu)點(diǎn)是具有非常好的穩(wěn)定性、可靠性和實(shí)時(shí)性,但是一般價(jià)格昂貴且互不兼容,而且源代碼作為商業(yè)秘密而不公開(kāi)。
嵌入式實(shí)時(shí)系統(tǒng)的特點(diǎn)
一、時(shí)間約束性實(shí)時(shí)系統(tǒng)的任務(wù)具有一定的時(shí)間約束(截止時(shí)間)。根據(jù)截止時(shí)間,實(shí)時(shí)系統(tǒng)的實(shí)時(shí)性分為"硬實(shí)時(shí)"和"軟實(shí)時(shí)".硬實(shí)時(shí)是指應(yīng)用的時(shí)間需求能夠得到完全滿足,否則就造成重大安全事故,甚至造成重大的生命財(cái)產(chǎn)損失和生態(tài)破壞,如在航空航天、軍事、核工業(yè)等一些關(guān)鍵領(lǐng)域中的應(yīng)用。軟實(shí)時(shí)是指某些應(yīng)用雖然提出時(shí)間需求,但實(shí)時(shí)任務(wù)偶爾違反這種需求對(duì)系統(tǒng)運(yùn)行及環(huán)境不會(huì)造成嚴(yán)重影響,如監(jiān)控系統(tǒng)等和信息采集系統(tǒng)等。
二、可預(yù)測(cè)性可預(yù)測(cè)性是指系統(tǒng)能夠?qū)?shí)時(shí)任務(wù)的執(zhí)行時(shí)間進(jìn)行判斷,確定是否能夠滿足任務(wù)的時(shí)限要求。由于實(shí)時(shí)系統(tǒng)對(duì)時(shí)間約束要求的嚴(yán)格性,使可預(yù)測(cè)性稱為實(shí)時(shí)系統(tǒng)的一項(xiàng)重要性能要求。除了要求硬件延遲的可預(yù)測(cè)性以外,還要求軟件系統(tǒng)的可預(yù)測(cè)性,包括應(yīng)用程序的響應(yīng)時(shí)間是可預(yù)測(cè)的,即在有限的時(shí)間內(nèi)完成必須的工作;以及操作系統(tǒng)的可預(yù)測(cè)性,即實(shí)時(shí)原語(yǔ)、調(diào)度函數(shù)等運(yùn)行開(kāi)銷應(yīng)是有界的,以保證應(yīng)用程序執(zhí)行時(shí)間的有界性。
1 Linux 2.6內(nèi)核的實(shí)時(shí)性分析
相對(duì)于老版本內(nèi)核,Linux 2.6版本的內(nèi)核結(jié)構(gòu)做了很大的改動(dòng),開(kāi)發(fā)者對(duì)很多功能模塊的代碼都進(jìn)行了重寫。最為顯著的改進(jìn)是在影響系統(tǒng)實(shí)時(shí)性的進(jìn)程調(diào)度方面,包括采用可搶占內(nèi)核和新的0(1)調(diào)度程序。
但是Linux在最初的設(shè)計(jì)是用作個(gè)人PC或者小型服務(wù)器的操作系統(tǒng),由于設(shè)計(jì)要求的針對(duì)性,導(dǎo)致了Linux無(wú)法提供硬實(shí)時(shí)環(huán)境,直接影響了它的硬實(shí)時(shí)性能。這主要表現(xiàn)在兩方面:
(1)進(jìn)程調(diào)度方式
Linux的進(jìn)程調(diào)度采用的是時(shí)間片輪轉(zhuǎn)調(diào)度策略。不論進(jìn)程優(yōu)先級(jí)的高低,Linux在某段時(shí)間內(nèi)都會(huì)分配給該進(jìn)程一個(gè)時(shí)間片運(yùn)行,也就是說(shuō)它的設(shè)計(jì)更注重任務(wù)調(diào)度的公平性。這種情況下,就會(huì)出現(xiàn)高優(yōu)先級(jí)進(jìn)程由于其時(shí)間片的耗盡而被迫放棄處理器,處理器被沒(méi)有耗盡時(shí)間片的低優(yōu)先級(jí)進(jìn)程所占用的現(xiàn)象。
(2)時(shí)鐘粒度粗糙
在Linux 2.6版本內(nèi)核中,時(shí)鐘中斷發(fā)生的頻率范圍為50~1 200Hz,周期不小于0.8 ms,而工業(yè)上很多的中斷周期都在幾十μs之內(nèi)。
對(duì)于上面提到的影響Linux實(shí)時(shí)性的問(wèn)題,目前的解決辦法主要有2種:
①對(duì)Linux內(nèi)核的內(nèi)部進(jìn)行實(shí)時(shí)改造,即直接修改Linux內(nèi)核的數(shù)據(jù)結(jié)構(gòu)、調(diào)度方式以及中斷方式(主要是時(shí)鐘中斷)。
采用這種方法,實(shí)時(shí)化改造后的系統(tǒng)實(shí)時(shí)性較好,但是工作量大,并且可能會(huì)造成系統(tǒng)不穩(wěn)定。最大的缺點(diǎn)是:原本在Linux上運(yùn)行的設(shè)備驅(qū)動(dòng)程序和應(yīng)用程序不能直接在改進(jìn)的內(nèi)核上運(yùn)行。典型代表有Kurt-Linux.
②對(duì)Linux內(nèi)核的外部實(shí)時(shí)擴(kuò)展,這種方法通常是采用雙內(nèi)核的辦法。具體是在Linux內(nèi)核和硬件間加入一個(gè)硬件抽象層(Hardware Abstract Layer,HAL),系統(tǒng)所有的硬件中斷由這個(gè)抽象層控制。新創(chuàng)建一個(gè)內(nèi)核專門用來(lái)調(diào)度實(shí)時(shí)進(jìn)程,而普通進(jìn)程通過(guò)原來(lái)的Linux內(nèi)核進(jìn)行調(diào)度。
2 Xenomai原理與應(yīng)用
2.1 Xenomai簡(jiǎn)介及其Adeos實(shí)現(xiàn)
Xenomai是一個(gè)自由軟件項(xiàng)目,提供了一個(gè)基于Linux的實(shí)時(shí)解決方案。它可以提供工業(yè)級(jí)RTOS的性能,而且完全遵守GNU/Linux自由軟件協(xié)議。目前最新穩(wěn)定版本是2.4.5.
Xenomai項(xiàng)目起始于2001年。從2003年夏天起,Xenomai和RTAI有了兩年時(shí)間的合作,期間開(kāi)發(fā)了廣為人知的RTAI/fusion項(xiàng)目分支。到2005年,Xenomai項(xiàng)目又重新獨(dú)立出來(lái)。而從2.0.0版本開(kāi)始,Xenomai在硬件平臺(tái)的移植就一直是基于Adeos構(gòu)架來(lái)實(shí)現(xiàn)的。
在基于Adeos的系統(tǒng)中,分為多個(gè)域。每個(gè)域中獨(dú)立運(yùn)行一個(gè)操作系統(tǒng)(或者是實(shí)現(xiàn)一定功能的程序模塊),每個(gè)域可以有獨(dú)立的地址空間和類似于進(jìn)程、虛擬內(nèi)存等的軟件抽象層。在各個(gè)域下層有一個(gè)Adeos通過(guò)虛擬中斷等方法來(lái)調(diào)度上面的各個(gè)域。在基于Adeos的系統(tǒng)中,存在著A、B、C、D四種類型的交互,如圖1所示。
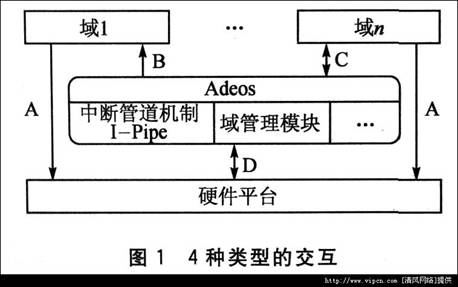
A類交互是各個(gè)域直接操作硬件設(shè)備,包括訪問(wèn)內(nèi)存等;B類交互指當(dāng)Adeos接收到硬件中斷后,會(huì)根據(jù)中斷來(lái)對(duì)相應(yīng)的域進(jìn)行中斷服務(wù);C類交互指當(dāng)前域內(nèi)的操作系統(tǒng)主動(dòng)向Adeos請(qǐng)求某些服務(wù);D類交互是指Adeos接收硬件產(chǎn)生的中斷和異常,同時(shí)也可以直接控制硬件。
2.2 Xenomai用戶層實(shí)時(shí)的實(shí)現(xiàn)
Xenomai除了在內(nèi)核層利用Adeos實(shí)現(xiàn)了硬實(shí)時(shí)外,它在用戶空間也有很好的實(shí)時(shí)性。在S3C2410平臺(tái)上,為了實(shí)現(xiàn)用戶層的實(shí)時(shí),Xenomai實(shí)現(xiàn)了一個(gè)硬件計(jì)數(shù)器--Decrementer.這個(gè)硬件計(jì)數(shù)器可以在用戶空問(wèn)里很好地模擬TSC(Time Stamp Counter,時(shí)間戳計(jì)數(shù)器)。
同時(shí),Xenomai在Linux內(nèi)核中加入了一個(gè)全新的數(shù)據(jù)結(jié)構(gòu)__ipipe_tscinfo,可以通過(guò)此數(shù)據(jù)結(jié)構(gòu)變量存放用戶層需要的數(shù)據(jù)。該數(shù)據(jù)結(jié)構(gòu)組成如下:

在用戶層,應(yīng)用程序通過(guò)系統(tǒng)調(diào)用可以迅速得到struct_ipipe_tscinfo結(jié)構(gòu)體中的數(shù)據(jù)。而且為了避免受到緩存的影響,Xenomai將此結(jié)構(gòu)體變量存放在Linux的向量頁(yè)中。
內(nèi)核通過(guò)函數(shù)_ipipe_mach_get_tscinfo來(lái)填充struct_ipipe_tscinfo結(jié)構(gòu)體變量中的各項(xiàng)內(nèi)容:
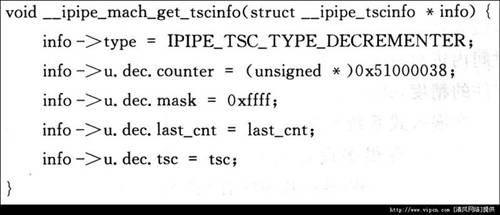
其中,info一>typte說(shuō)明在S3C2410平臺(tái)上TSC是基于Decrementer硬件計(jì)數(shù)方式的;info一>u.dec.counter用來(lái)將Decrementer計(jì)數(shù)器的物理地址設(shè)定為0x51000038;info一>u.dec.mask掩碼用來(lái)注明使用Dec-rementet.計(jì)數(shù)器中的特定位;info一>u.dec.tsc指向存放64位TSC值的區(qū)域。
在Xenomai用戶層的實(shí)時(shí)程序運(yùn)行時(shí),程序都會(huì)通過(guò)系統(tǒng)調(diào)用得到內(nèi)核填充好的struct_ipipe_tscinfo結(jié)構(gòu)體變量。具體實(shí)現(xiàn)可參考編譯用戶層實(shí)時(shí)程序時(shí)用到的,由Xenomai所提的頭文件/usr/xenomai/include/asm/syscall.h.
2.3 Xenomai多API構(gòu)架
除了提供Linux硬實(shí)時(shí),Xenomai的另一個(gè)目的是使基于Linux的實(shí)時(shí)操作系統(tǒng)能提供與傳統(tǒng)的工業(yè)級(jí)實(shí)時(shí)操作系統(tǒng)(包括VxWorks、pSOS+、VRTX或者uITRON)功能相同的API.這樣,可以讓這些操作系統(tǒng)下的應(yīng)用程序能夠很容易地移植到GNU/Linux環(huán)境中,同時(shí)保持很好的實(shí)時(shí)性。
Xenomai的核心技術(shù)表現(xiàn)為使用一個(gè)實(shí)時(shí)微內(nèi)核(real-time nucleus)來(lái)構(gòu)建這些實(shí)時(shí)API,也稱作"skin".在實(shí)時(shí)核復(fù)用的基礎(chǔ)上,一個(gè)skin可以很好地模擬一種實(shí)時(shí)操作系統(tǒng)的API.它的結(jié)構(gòu)圖可以參考圖2.
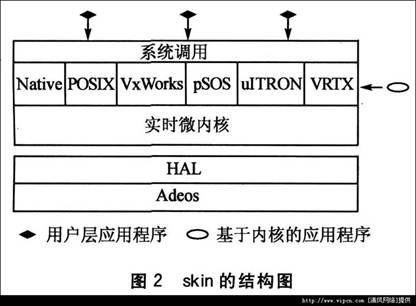
圖2中,Native是Xenomai自帶的API,各類API都有著同等的地位,都獨(dú)立地基于同一個(gè)實(shí)時(shí)微內(nèi)核。這樣做可以讓內(nèi)核的優(yōu)點(diǎn)被外層所有的API很好地繼承下來(lái)。更重要的是,實(shí)時(shí)微內(nèi)核提供的服務(wù)被外層各種API以不同的方式表現(xiàn)出來(lái),由此可以增強(qiáng)整個(gè)系統(tǒng)的強(qiáng)壯性。
編制實(shí)時(shí)程序時(shí),在很多實(shí)時(shí)操作系統(tǒng)上只能在內(nèi)核層實(shí)現(xiàn);而編制實(shí)時(shí)內(nèi)核模塊時(shí),會(huì)受到內(nèi)核的限制,比如有些實(shí)時(shí)內(nèi)核不支持浮點(diǎn)運(yùn)算,模塊出錯(cuò)時(shí)容易使整個(gè)系統(tǒng)掛起,而且內(nèi)核模塊的調(diào)試比較困難。Xenomai能夠支持較好的用戶層實(shí)時(shí),這為編制實(shí)時(shí)性要求不是非常高的實(shí)時(shí)程序提供了一個(gè)有效途徑。下面這個(gè)用戶層實(shí)時(shí)例程使用的是Xenomai提供的Native API:
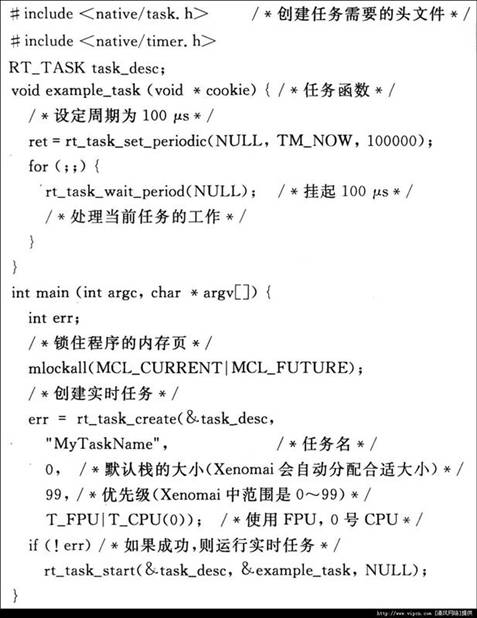
從程序中可以看出,Xenomai的用戶層實(shí)時(shí)程序的周期可以輕易地設(shè)定到μs級(jí),所以它完全可以適用于一般實(shí)時(shí)性要求的工程應(yīng)用。
3 總 結(jié)
本文首先簡(jiǎn)單介紹了實(shí)時(shí)操作系統(tǒng),分析了Linux 2.6內(nèi)核實(shí)時(shí)性能的不足;然后著重介紹了一個(gè)Linux實(shí)時(shí)化的解決方案--Xenomai,分析了Xenomai的Adeos構(gòu)架基礎(chǔ),簡(jiǎn)要說(shuō)明了Xenomai用戶層實(shí)時(shí)的實(shí)現(xiàn),以及Xenomai支持多種實(shí)時(shí)操作系統(tǒng)的API的新特點(diǎn)。Linux 2.6.35 Kernel引入了針對(duì)Radeon KMS開(kāi)源顯卡驅(qū)動(dòng)的ATI電源管理支持、新款I(lǐng)ntel GMA整合芯片組的Intel H.264 VA-API視頻加速支持、Radeon DRI2同步和交換功能、Btrfs文件系統(tǒng)改進(jìn)、網(wǎng)絡(luò)傳入負(fù)載處理器核心分布的RPS和RFS支持等等。
本文給出的Xenomai的用戶層實(shí)時(shí)例程已經(jīng)成功地在多個(gè)平臺(tái)上運(yùn)行過(guò),表明Xenomai用戶程序在多種硬件平臺(tái)上有很好的移植性。