
O 引言
無刷直流電動(dòng)機(jī)以其具備交流電動(dòng)機(jī)結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、維護(hù)方便等優(yōu)點(diǎn),同時(shí)又具備直流電動(dòng)機(jī)的效率高、調(diào)速性能好等諸多特點(diǎn),而在工業(yè)控制、儀器儀表、航空航天等領(lǐng)域的應(yīng)用日益廣泛。A3936就是Allegro公司推出的新一代三相無刷直流電動(dòng)機(jī)專用控制/驅(qū)動(dòng)器芯片。
1 A3936的特點(diǎn)功能
1.1 主要特點(diǎn)
A3936是美國Allegro公司生產(chǎn)的新型DMOS三相PWM電機(jī)驅(qū)動(dòng)器,它主要包括換相邏輯和功率驅(qū)動(dòng)電路,可通過給定控制電壓信號(hào)和方向控制邏輯信號(hào)來完成無刷直流電動(dòng)機(jī)的調(diào)速和正反轉(zhuǎn)控制。另外,A3936還具有內(nèi)部欠壓鎖定、交叉電流保護(hù)、過熱保護(hù)等功能,因而使用非常方便。此外,A3936 還具有±3 A/50 V的連續(xù)輸出;并具有可編程的四種續(xù)流工作模式。包括slow模式、fast模式和2種mixed模式;同時(shí)可低功耗同步整流控制。A3936的輸出電阻在拉電流時(shí)的典型值為0.55 Ω;灌電流時(shí)的典型值為0.35 Ω。A3936芯片內(nèi)部帶有欠壓鎖定、交叉電流保護(hù)和過熱保護(hù)功能,并有睡眠及空閑模式,以及可制動(dòng)功能和死區(qū)設(shè)置。
1.2 引腳介紹
A3936芯片采用44腳PLCC封裝型式,其引腳排列如圖l所示。各引腳的功能如下:

引腳1、2、11、12、13、22、23、24、33、34、35、44(GND):接地端;
引腳3、4、5、6、7、8(HA、HB、HC):無刷直流電動(dòng)機(jī)HALL元件信號(hào)輸入端;
引腳9(VDD):+5 V電源;
引腳10(REF):參考電壓VREF輸入端,通過控制該電壓可控制PWM占空比;
引腳14(BRAKE):制動(dòng)控制端,當(dāng)該腳為高電平時(shí),無刷直流電動(dòng)機(jī)內(nèi)的電流會(huì)瞬間釋放,電機(jī)突然停轉(zhuǎn);而在正常使用時(shí),該腳接低電平;
引腳15(SENSE):采樣電阻RS引腳,其數(shù)值一般取0.1 Ω。該采樣電阻與VREF可決定電動(dòng)機(jī)的負(fù)載電流。
引腳16(SR):同步整流輸入,高電平有效;
引腳17、2l、28(OUT):無刷直流電動(dòng)機(jī)A、B、C相驅(qū)動(dòng)輸出端;
引腳18 (HBIAS):HALL元件的負(fù)極;
引腳19、26(VBB):負(fù)載電源;
引腳20、25 (LSS):通過采樣電阻RS與負(fù)載電源地相連;
引腳27 (TACH):速度輸出,一般懸空不用;
引腳29 (VCP):充電電容連接端,應(yīng)通過0.22μF/50 V電容與VBB相連;
引腳30、3l(CPl、CP2):電荷泵電容連接端,二者應(yīng)通過0.22μF/100 V電容相連;
引腳32 (SLEEP):睡眠模式邏輯控制輸入端,低電平輸入時(shí),進(jìn)入睡眠模式;
引腳36 (OSC):振蕩信號(hào)連接端,可通過51kΩ電阻與VDD相連;
引腳37 (VREG):整流去耦端,應(yīng)外接0.22 μF/50V去耦電容;
引腳38 (DIR):方向控制邏輯輸入端,低電平為順時(shí)針旋轉(zhuǎn),高電平為逆時(shí)針旋轉(zhuǎn);
引腳39 (ENABLE):使能控制邏輯輸入端;
引腳40 (EXTMODE):外接PWM控制模式邏輯輸入端。使用外接PWM控制模式時(shí),若輸入高電平,為電流慢衰減模式;若輸入低電平,則為電流快衰減模式;
引腳41 (BLANK):為死區(qū)邏輯控制輸入端;若輸入高電平,死區(qū)時(shí)間為12/fosc;若輸入低電平,死區(qū)時(shí)間為6/fosc;
引腳42、43(PFD):PFD邏輯控制輸入端,二者組合可用于決定采用哪一種續(xù)流控制模式。
2 A3936的工作原理
2.1 通電控制規(guī)律
A3936內(nèi)部具有全橋驅(qū)動(dòng)的功率邏輯開關(guān)單元和位置傳感器的信號(hào)處理單元,可用來控制電動(dòng)機(jī)定子上各相繞組通電的順序和時(shí)間。全橋驅(qū)動(dòng)的功率邏輯開關(guān)單元可將電源的功率以一定的邏輯關(guān)系分配給電動(dòng)機(jī)定子上的各相繞組,以使電動(dòng)機(jī)產(chǎn)生持續(xù)不斷的轉(zhuǎn)矩。位置傳感器的信號(hào)處理單元可將電動(dòng)機(jī)轉(zhuǎn)子的位置信號(hào)轉(zhuǎn)換為電信號(hào),以便為功率邏輯開關(guān)電路提供正確的換相信息,控制電動(dòng)機(jī)定子繞組換相。同時(shí),電動(dòng)機(jī)的轉(zhuǎn)向還受到38腳方向控制邏輯的控制。三者之間的邏輯關(guān)系如表1所列。
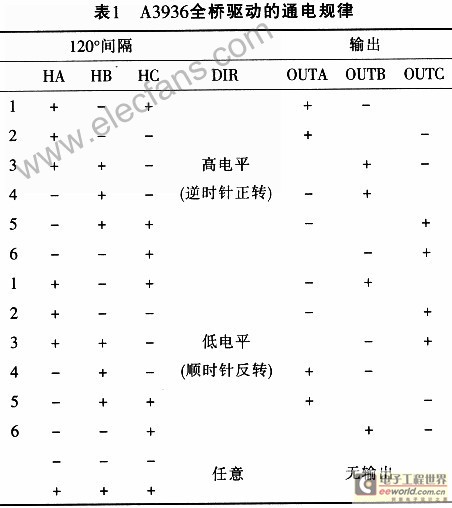
表l中,在HALL傳感器部分: “+”表示高電平; “-”表示低電平;輸出部分:“+”表示正向通電:“-”表示反向通電。
2.2 負(fù)載電流調(diào)節(jié)
負(fù)載電流可通過A3936內(nèi)部的固定低電平(使用4MHz晶振時(shí),典型值為24μs)PWM電路進(jìn)行調(diào)節(jié)。當(dāng)H橋正常工作時(shí),電動(dòng)機(jī)繞組電流上升,直到到達(dá)閾值為止,該閾值由下式?jīng)Q定:
達(dá)到閾值時(shí),邏輯電路將關(guān)閉H橋,負(fù)載電流在感應(yīng)電動(dòng)勢(shì)的作用下進(jìn)行續(xù)流,其續(xù)流時(shí)的流通路徑由slow/mixed續(xù)流模式和同步整流模式?jīng)Q定。
2.3 續(xù)流控制模式
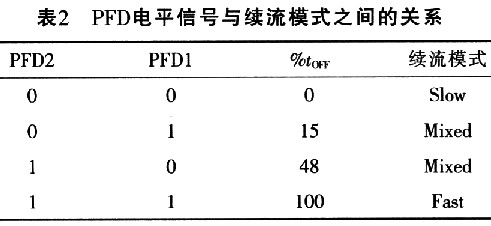
A3936的輸入引腳PFD1和PFD2的電平信號(hào)決定了過流關(guān)斷或PWM斬波時(shí)負(fù)載電流的不同續(xù)流模式。根據(jù)PFDl和PFD2電平信號(hào)的不同,A3936共有四種續(xù)流控制模式:slow模式、fast模式和兩種mixed模式,不同的續(xù)流模式?jīng)Q定了不同的負(fù)載電流波形。PFD電平信號(hào)與續(xù)流模式之間的關(guān)系如表2所列。
2.4 同步整流模式
當(dāng)A3936的SR引腳為高電平時(shí),使能同步整流模式,此時(shí)負(fù)載電流按照控制邏輯選定續(xù)流模式進(jìn)行續(xù)流。在續(xù)流期間,同步整流控制電路開通對(duì)應(yīng) MOSFET管,以使得負(fù)載電流同時(shí)可以通過MOSFET管續(xù)流,從而降低續(xù)流時(shí)的導(dǎo)通電壓,減小導(dǎo)通損耗。同時(shí),該同步整流控制電路還考慮了死區(qū)保護(hù),故可防止橋臂直通。
3 A3936的應(yīng)用電路
A3936無刷直流電動(dòng)機(jī)驅(qū)動(dòng)集成電路由于其集成度高,外圍元件少,使用起來非常簡(jiǎn)便。其外圍電路連接圖如圖2所示。

電路連接后,便可設(shè)置續(xù)流控制模式和同步整流模式(也可不用)。之后,只需給出電動(dòng)機(jī)旋轉(zhuǎn)的方向(由38腳的控制邏輯決定)和旋轉(zhuǎn)的速度(由10腳REF 的電壓決定),即可完成對(duì)電動(dòng)機(jī)的控制。某型船載衛(wèi)星電視接收系統(tǒng)的伺服驅(qū)動(dòng)控制需要對(duì)接收天線的水平、俯仰和橫滾三個(gè)方向進(jìn)行伺服驅(qū)動(dòng)控制,其控制核心采用PC104計(jì)算機(jī),并利用其I/O口(25針并口)實(shí)現(xiàn)對(duì)A3936的控制。由于PC104的輸出為數(shù)字量且需控制三臺(tái)無刷直流電動(dòng)機(jī),因此,本設(shè)計(jì)增加了4路8位D/A轉(zhuǎn)換電路MAX505和8位選通開關(guān)CD4099。MAX505用于控制電動(dòng)機(jī)轉(zhuǎn)速;CD4099則用于控制電動(dòng)機(jī)的轉(zhuǎn)向。其電路結(jié)構(gòu)圖如圖3所示。

PC104標(biāo)準(zhǔn)并口具有12個(gè)輸出位和5個(gè)輸入位,其中8位數(shù)據(jù)位DO~D7中的D0~D6是送給MAX505的數(shù)據(jù),可經(jīng)D/A轉(zhuǎn)換后用于控制無刷直流電機(jī)的轉(zhuǎn)速。A0、A1是MAX505的地址線,可由PC104并口的14、17引腳控制,用于決定DO~D6應(yīng)當(dāng)轉(zhuǎn)換到VOUTA、VOUTB、 VOUTC中的哪個(gè)輸出端。WR為寫控制端,由PC104并口的16引腳控制,但當(dāng)數(shù)據(jù)寫操作完成后,必須將WR端置1。D7代表轉(zhuǎn)動(dòng)方向(D7為0代表順時(shí)針轉(zhuǎn)動(dòng);D7為1代表逆時(shí)針轉(zhuǎn)動(dòng)),D7通常連接到CD4099的引腳3上,可以使CD4099根據(jù)A0、A1的地址數(shù)據(jù)將此方向的信息送到相應(yīng)的輸出端,從而控制相應(yīng)A3936,并最終實(shí)現(xiàn)對(duì)相應(yīng)無刷直流電動(dòng)機(jī)的方向控制。當(dāng)需要對(duì)無刷直流電動(dòng)機(jī)進(jìn)行控制時(shí),只需對(duì)相應(yīng)的地址(0X378、 0X37A)寫入控制字,便可實(shí)現(xiàn)對(duì)電動(dòng)機(jī)的轉(zhuǎn)動(dòng)方向和轉(zhuǎn)速的控制。
4 結(jié)束語
A3936獨(dú)特的續(xù)流控制模式,可使無刷直流電動(dòng)機(jī)在不同負(fù)載時(shí)均可獲得不同的負(fù)載電流波形,從而保證較高的控制精度。同步整流模式則可降低續(xù)流時(shí)的導(dǎo)通電壓和功耗。由于A3936器件與計(jì)算機(jī)接口兼容,控制方式簡(jiǎn)單靈活,因而具有較高的應(yīng)用價(jià)值。