
TI公司的高速數(shù)字信號處理器TMS320C6000系列DSP支持并行處理,采用甚長指令字(VLIW)體系結(jié)構(gòu),內(nèi)部設置有8個功能單元(兩個乘法器和6個ALU),8個功能單元可并行操作,最多可以在一個周期內(nèi)同時執(zhí)行八條32位指令。指令操作為“流水線”工作方式。應用高性能DSP可以大大提高數(shù)據(jù)密集型應用系統(tǒng)的性能,能快速完成濾波、卷積、FFT等數(shù)字信號處理或進行更復雜的運算,在現(xiàn)代信號數(shù)字化處理中有很好的應用前景。
由于內(nèi)部結(jié)構(gòu)上的差異,TMS320C6000系列與TMS320C54系列的引導方式有很大差別。在開發(fā)應用TMS320C6000系列DSP時,許多開發(fā)者,尤其是初涉及者對DSP ROM引導的實現(xiàn)有些困難,花費許多時間和精力摸索。筆者結(jié)合開發(fā)實例,介紹了實現(xiàn)外部存儲器引導的具體方法。
DSP的引導過程
DSP系統(tǒng)的引導(BOOT)是指系統(tǒng)加電或復位時,DSP將一段存儲在外部的非易失性存儲器的程序代碼通過DMA方式拷貝到內(nèi)部的高速內(nèi)存中運行。這樣既能擴展DSP有限的存儲空間,又能充分發(fā)揮DSP內(nèi)部資源的效能。用戶的代碼也可以通過掩膜方式寫入到DSP內(nèi)部ROM中,但這樣受容量和價格的限制,且不便于擴展和升級。
DSP的引導過程如下:
1) DSP復位后,通過DMA方式將外部CE1空間的數(shù)據(jù)讀入到內(nèi)部程序空間地址0處,讀入數(shù)據(jù)的多少因芯片而異(TMS320C6712一次只拷貝1KB)。
2) DSP推出復位狀態(tài),開始執(zhí)行內(nèi)部程序空間地址0處的程序,這段程序先將外部主程序數(shù)據(jù)讀入到DSP內(nèi)部程序空間相應地址,然后跳轉(zhuǎn)到主程序運行。
第一步是由芯片自動完成,關鍵是第二步:用戶需要編寫相應的匯編程序,實現(xiàn)二次引導,即用戶主程序的裝載。
引導失敗的原因分析
(1)鏈接命令文件(.cmd)文件
鏈接命令文件定義了鏈接的參數(shù),描述系統(tǒng)生成的可執(zhí)行代碼各段的段名及映射到目標板的物理空間。當這些段的起始地址或段的長度編寫錯誤時,引導程序就可能發(fā)生錯誤。
(2)可執(zhí)行代碼的二進制文件格式
用戶的程序在CCS開發(fā)環(huán)境下編譯生成COFF文件格式,仿真過程中可以直接加載COFF文件運行。但當調(diào)試仿真通過后,目標板要脫離CCS環(huán)境獨立運行時,可執(zhí)行代碼就需要轉(zhuǎn)換為二進制文件格式,保存在目標板的外部存儲器上。轉(zhuǎn)換時需要使用正確的配置文件。
(3)目標板的硬件電路(引導模式,系統(tǒng)時鐘)
目標板的硬件電路也會影響引導程序的正常運行,如設置的引導模式與實際的外部存儲器不符,系統(tǒng)時鐘電路不工作,復位信號恒有效等。
下面結(jié)合TMS320C6212的開發(fā)實例,具體介紹外部存儲器引導的實現(xiàn)。
ROM引導實例
TMS320C6212是TMS320C6201的簡化版芯片,內(nèi)部資源相對較少,工作頻率相對較低,但其價格低廉,具有很高的性能價格比。TMS320C6212的工作頻率可達150MHz,最高處理能力為900MIPS,很適合中小型系統(tǒng)開發(fā)。
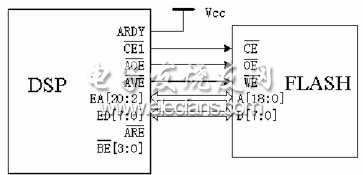
由于FLASH是一種高密度、非易失的電擦寫存儲器,系統(tǒng)采用FLASH作為外部存儲器。除了專用的硬件編程器可以把二進制代碼寫入FLASH中,還可以利用DSP的調(diào)試系統(tǒng),通過軟件編程寫入。DSP與FLASH的接口連接如圖1所示。
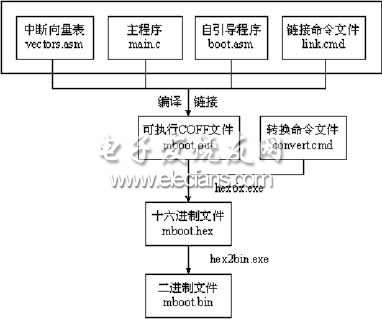
系統(tǒng)工程在CCS開發(fā)環(huán)境下使用C語言編程,這樣可以縮短開發(fā)周期,提高工作效率,并具有移植性好的優(yōu)點。引導工程的文件流程如圖2所示。
(1) 中斷向量表 vectors.asm
中斷向量表缺省保存在DSP芯片內(nèi)部RAM的0地址開始的0x200字節(jié)空間,上電或復位后,芯片自動運行復位中斷。因此,復位中斷向量設置為引導程序(_boot)的入口地址,引導程序的主體在boot.asm中定義。部分程序如下:
.ref _boot ;調(diào)用引導程序
.sect “.vectors” ;段聲明
RESET_RST: ;復位中斷向量
mvkl .S2 _boot, B0 ;裝載引導程序地址
mvkh .S2 _boot, B0
B .S2 B0 ;跳轉(zhuǎn)到引導程序執(zhí)行
NOP 5
(2) 自引導的匯編程序 boot.asm
自引導匯編程序主要是配置基本的寄存器,并將保存在外部FLASH中的二進制程序拷貝到DSP內(nèi)部的RAM中再執(zhí)行。由于TMS320C6712自動拷貝1KB,因此起始地址是從0x400開始,匯編程序如下:
.sect “.boot_load” ;定義數(shù)據(jù)段
.ref _c_int00 ;聲明外部函數(shù)
.global _boot ;定義全局函數(shù)
_boot:
;先設置控制寄存器,如EMIF_GCR等,(略)
;拷貝FLASH中的程序到DSP內(nèi)部RAM
mvkl 0x00000400, A4 ;A4為RAM地址指針
|| mvkl 0x90000400, B4 ;B4為FLASH地址指針
mvkh 0x00000400, A4
|| mvkh 0x90000400, B4
zero A1 ;A1用作計數(shù)器
_boot_loop: ;DSP開始讀取FLASH中程序
ldb *B4++, B5
mvkl 0x0000F200, B6 ;B6為需要拷貝的字節(jié)數(shù)
add 1, A1, A1
|| mvkh 0x0000F200, B6
cmplt A1, B6, A0
nop
stb B5, *A4++
[B0] b _boot_loop
nop 5
mvkl .S2 _c_int00, B0 ;循環(huán)結(jié)束后,跳轉(zhuǎn)到主函數(shù)main執(zhí)行
mvkh .S2 _c_int00, B0
B .S2 B0
Nop 5
(3) 主程序 main.c
主程序是DSP要實現(xiàn)具體功能的主體,其定義的主函數(shù)main()經(jīng)編譯后在函數(shù)_c_int00中調(diào)用,因此在上面的引導程序結(jié)束時,將跳轉(zhuǎn)到函數(shù)_c_int00,即主函數(shù)main執(zhí)行。
(4) 鏈接命令程序 link.cmd
鏈接命令程序用于定義系統(tǒng)各存儲器的地址及大小,并分配編譯后各段到相應的存儲空間,link.cmd內(nèi)容如下:
-c
-lrts6201.lib
MEMORY
{
vecs: o = 00000000h =00000200h
BOOT_RAM: o = 00000200h l = 00000200h
IRAM: o = 00000400h l = 0000c400h
CE0: o = 80000000h l = 01000000h
CE1: o = 90000000h l = 00100000h
}
SECTIONS
{
.vectors > vecs fill = 0
.boot_load > BOOT_RAM fill = 0
.text > IRAM fill = 0
.stack > IRAM fill = 0
.bss > IRAM fill = 0
.cinit > IRAM fill = 0
.far > IRAM fill = 0
.sysmem > IRAM fill = 0
.cio > IRAM fill = 0
}
(5) 轉(zhuǎn)換命令程序 convert.cmd
上面的工程文件經(jīng)CCS系統(tǒng)編譯、匯編后生成可執(zhí)行COFF文件(.out),它需要轉(zhuǎn)換為二進制文件,再寫入到FLASH中。CCS開發(fā)系統(tǒng)帶有轉(zhuǎn)換程序:
hex6x.exe 將可執(zhí)行COFF文件(.out)轉(zhuǎn)換為十六進制文件(.hex)
hex2bin.exe將十六進制文件(.hex)轉(zhuǎn)換為二進制文件(.bin)
命令行的格式為:
hex6x.exe convert.cmd
hex2bin.exe mboot
其中convert.cmd內(nèi)容如下:
mboot.out ;輸入文件名 .out 格式
-x
-map mboot.map ;生成映射文件
-image
-memwidth 8 ;內(nèi)存的位寬
-o mboot.hex ;輸出文件名 .hex格式
ROMS
{
FLASH: org = 0, len = 0x10000, romwidth = 8
}
結(jié)束語
綜上所述,實現(xiàn)TMS320C6712的外部內(nèi)存自引導并不復雜,關鍵是要理解芯片的自引導過程和程序匯編后各部分的作用,配置好引導代碼段和程序代碼段的實際物理地址,并且正確地初始化相應的寄存器和變量。