
本文以光柵位移傳感器檢測(cè)系統(tǒng)的設(shè)計(jì)為背景,詳細(xì)介紹了帶全速USB接口的單片機(jī)PIC18F4550的應(yīng)用設(shè)計(jì)方法。
1 PIC18F4550介紹
PIC18F4550是Microchip公司最新生產(chǎn)的帶全速USB接口的8位高檔單片機(jī),芯片為40/44腳封裝。該單片機(jī)除了具有PIC單片機(jī)所特有的精簡(jiǎn)指令集(RISC)、數(shù)據(jù)總線和指令總線相互獨(dú)立的哈佛(Harvard)結(jié)構(gòu)等特點(diǎn)外,還配備了自編程閃存存儲(chǔ)器以及納瓦節(jié)能技術(shù),工作頻率達(dá)48 MHz,數(shù)據(jù)傳輸速率高達(dá)12 Mbps。另外,還具有Microchip先進(jìn)PMOS電可擦除單元(PEEC)閃存技術(shù),耐擦寫(xiě)次數(shù)可高達(dá)100萬(wàn)次,而數(shù)據(jù)保存期能超過(guò)40年。因而該芯片有很強(qiáng)的控制能力和靈活的工作方式。新器件的全速USB 2.0接口具有1 KB雙重存取RAM,支持高達(dá)32個(gè)端點(diǎn)(雙向16對(duì))和2種數(shù)據(jù)傳輸速率(即全速模式1 2 Mbps和低速模式1.5 Mbps),具有USB協(xié)議所規(guī)定的4種數(shù)據(jù)傳輸方式(控制傳輸方式、中斷傳輸方式、批量傳輸方式和實(shí)時(shí)傳輸方式)。該接口包括一個(gè)片上收發(fā)器和一個(gè)并行流端口,能把數(shù)據(jù)直接傳送到外部的設(shè)備,不僅減小了CPU的開(kāi)銷(xiāo),而且大大增強(qiáng)了系統(tǒng)的抗干擾能力和工作可靠性。
PIC18F4550的硬件資源非常豐富,包含33個(gè)I/O,I/O端口為端口A、B、C、D、E;具有多個(gè)中斷源和1個(gè)中斷優(yōu)先級(jí)選擇,4個(gè)定時(shí)器,32 KB程序閃存,256字節(jié)EEP-ROM數(shù)據(jù)存儲(chǔ)器,2 048字節(jié)數(shù)據(jù)隨機(jī)存儲(chǔ)器以及8×8硬件乘法器;集成了13通道的10位A/D轉(zhuǎn)換器,2個(gè)CCP(比較/捕捉/PWM)模塊,1個(gè)增強(qiáng)型CCP模塊和1個(gè)看門(mén)狗;具有省電功能的休眠模式;1個(gè)USART不僅支持異步與同步的串行通信,而且支持LIN總線;2個(gè)模擬比較器,支持I2C和SPI通信的主控同步串行端口,可編程欠壓復(fù)位及低電壓檢測(cè)電路等。
PIC18F4550單片機(jī)的一個(gè)關(guān)鍵特性在于它配備了32 KB自編程增強(qiáng)型閃存,使得設(shè)計(jì)人員可以通過(guò)USB端口對(duì)最終應(yīng)用進(jìn)行現(xiàn)場(chǎng)升級(jí)。結(jié)合新器件配備的一系列片上外設(shè)和納瓦技術(shù)(nanoWatt)的功耗管理功能,使其非常適用于多種嵌入式應(yīng)用,包括工業(yè)、醫(yī)療、汽車(chē)、電池供電和消費(fèi)類(lèi)產(chǎn)品等。
2 PIC18F4550的設(shè)計(jì)應(yīng)用
2.1 光柵位移傳感器的基本工作原理、特點(diǎn)
光柵位移傳感器的基本工作原理是利用一對(duì)光柵,其中一塊是固定的,而另一塊是運(yùn)動(dòng)的。當(dāng)它們發(fā)生相對(duì)運(yùn)動(dòng)并有光通過(guò)兩者時(shí),能夠獲得相當(dāng)于干涉儀中得到的條紋信號(hào),即所謂的“莫爾條紋信號(hào)”。對(duì)于一對(duì)計(jì)量光柵,彼此移動(dòng)一條刻槽(現(xiàn)代計(jì)量光柵常采用4~250 L/mm)就移動(dòng)一條莫爾條紋。條紋寬度不受波長(zhǎng)影響,并且條紋較寬可進(jìn)行內(nèi)插,由于誤差平均效應(yīng),因而可以獲得很高的精度。與普通位移傳感器相比,它有以下幾個(gè)特點(diǎn): ① 精度高。光柵位移傳感器在大量程測(cè)量長(zhǎng)度或直線位移方面僅僅低于激光干涉?zhèn)鞲衅鳎辉趫A分度和角位移測(cè)量方面,光柵式傳感器屬于精度最高的。
② 大量程測(cè)量兼有高分辨率。感應(yīng)同步器和磁柵式傳感器也具有大量程測(cè)量的特點(diǎn),但分辨力和精度都不如光柵位移傳感器。
③ 可動(dòng)態(tài)測(cè)量,易于實(shí)現(xiàn)測(cè)量及數(shù)據(jù)處理自動(dòng)化。
④ 具有較強(qiáng)的抗干擾能力,對(duì)環(huán)境條件的要求不像激光干涉?zhèn)鞲衅髂敲磭?yán)格,但不如感應(yīng)同步器和磁柵式傳感器的適應(yīng)性強(qiáng)。油污和灰塵會(huì)影響它的可靠性,主要適合于在實(shí)驗(yàn)室和環(huán)境較好的車(chē)間使用。
2.2 PIC18F4550硬件設(shè)計(jì)
PIC18F4550的USB接口硬件設(shè)計(jì)比較簡(jiǎn)單,而單片機(jī)控制的外圍設(shè)備屬于一般單片機(jī)設(shè)計(jì),可以參照一般PIC單片機(jī)的設(shè)計(jì)方法。對(duì)于USB接口,Microchip公司提供了一套開(kāi)發(fā)套件(Demo板)幫助使用者開(kāi)發(fā)自己的產(chǎn)品。它提供了應(yīng)用程序、驅(qū)動(dòng)程序和固件,幫助使用者熟悉USB的工作過(guò)程;同時(shí),可以直接利用開(kāi)發(fā)套件來(lái)擴(kuò)展外圍設(shè)備。
圖1是一個(gè)光柵位移傳感器檢測(cè)系統(tǒng)硬件電路框圖,主要實(shí)現(xiàn)數(shù)據(jù)的采集、處理、傳輸和PWM脈沖的產(chǎn)生等。從光柵傳感器輸入的信號(hào)有5路:±sin,±cos以及零窗信號(hào)zero。經(jīng)差分放大電路合成,分3路進(jìn)入PIC單片機(jī)模擬量輸入口進(jìn)行A/D轉(zhuǎn)換;同時(shí),經(jīng)差分放大電路合成后的sin、cos信號(hào)經(jīng)過(guò)零比較器后轉(zhuǎn)換成數(shù)字脈沖信號(hào),然后經(jīng)D觸發(fā)器和“與”門(mén)電路完成光柵位移的辨向。PIC單片機(jī)T0和T1口接收來(lái)自“與”門(mén)電路的數(shù)字脈沖,完成光柵位移的計(jì)數(shù)(計(jì)算光柵尺移動(dòng)的完整光柵數(shù));PIC單片機(jī)RC1口輸出4 MHz的PWM脈沖信號(hào)作為D觸發(fā)器的CP信號(hào)。計(jì)算機(jī)的USB接口兩根數(shù)據(jù)線分別接PIC18F4550的D+和D-口,用于完成計(jì)算機(jī)和單片機(jī)之間的數(shù)據(jù)通信。計(jì)算機(jī)的USB電源一方面為PIC微處理器提供能源,另一方面通過(guò)電源模塊轉(zhuǎn)換成±12 V電源,為運(yùn)放電路提供正負(fù)電源。

2.3 單片機(jī)軟件部分設(shè)計(jì)
單片機(jī)的軟件部分主要完成光柵位移傳感器的數(shù)據(jù)采集、A/D轉(zhuǎn)換、計(jì)算光柵位移傳感器的正向、反向莫爾條紋的個(gè)數(shù)、為數(shù)字電路提供CP脈沖以及完成USB的通信等工作。圖2是單片機(jī)軟件部分的流程圖。

2.4 PIC18F4550的固件設(shè)計(jì)
微芯公司提供了一系列的USB寄存器,使用這些寄存器可以完成USB通信。大多數(shù)的USB通信都是通過(guò)中斷來(lái)完成的,在USB中斷服務(wù)程序內(nèi),要實(shí)現(xiàn)輸入/輸出接口,允許大多數(shù)的USB程序在后臺(tái)完成。從應(yīng)用的觀點(diǎn)來(lái)看,枚舉過(guò)程和數(shù)據(jù)通信的發(fā)生好像沒(méi)有聯(lián)系。
對(duì)于單片機(jī)控制程序,目前沒(méi)有任何廠商提供自動(dòng)生成固件(firmware)的工具,因此所有程序都要由自己手工編制。由于USB協(xié)議的復(fù)雜性,并且考慮 到廣大客戶(hù)的需求,因此,Microchip公司在推出PIC18F4550系列芯片時(shí),提供了面向不同客戶(hù)群的DEMO程序,這就大大減輕了系統(tǒng)開(kāi)發(fā)人員的負(fù)擔(dān),同時(shí)縮短了開(kāi)發(fā)周期。本系統(tǒng)的設(shè)計(jì)就是在Microchip公司提供的DEMO程序的基礎(chǔ)上,進(jìn)行必要的修改來(lái)完成的。本設(shè)計(jì)的具體固件主要由以下8個(gè)文件組成。
① main.c:系統(tǒng)的主程序,包括InitializeSystem()和USBTasks(void)兩個(gè)子程序,主要完成系統(tǒng)的初始化以及其他各種子程序的調(diào)用。
② usb9.c:實(shí)現(xiàn)的是USB協(xié)議第9章的功能,包括枚舉總線的接口和核心功能,以及USB的中斷服務(wù)程序。它處理由USB用戶(hù)所產(chǎn)生的所有的中斷。在這個(gè)程序中,主要實(shí)現(xiàn)對(duì)描述符的枚舉以及休眠、復(fù)位功能,主要包括USBCheckStdRequest(void)、USBStdGetDscHandler(void)和USBStdFeatureReqHandler(void)等5個(gè)子程序。
③ usbctrltrf.c:主要實(shí)現(xiàn)USB控制傳輸所需的各種功能,主要由USBCtrlTrfSetupHandler(void)、USBCtr-lEPServiceComplete(void)和USBPrepareForNextSetup-Trf(void)等8個(gè)子程序組成。
④ usbdrv.c:主要實(shí)現(xiàn)與USB驅(qū)動(dòng)相關(guān)的功能,包括檢查總線狀態(tài)、USB模塊使能、USB模塊掛起、遠(yuǎn)程喚醒等功能;主要由USBSuspend(void)、USBModuleEnable(void)、USBSoftDetach(void)和USBDriverService(void)等12個(gè)子程序組成。
⑤ usbdsc.c:主要是對(duì)該系統(tǒng)的描述,包括廠商、產(chǎn)品號(hào)等的描述。
⑥ usbgen.c:對(duì)USB設(shè)備類(lèi)的配置(在這里把它配置為通用USB類(lèi)),主要包括USB通用類(lèi)的初始化端點(diǎn)和讀寫(xiě),由USBGenInitEP(void)、USBGenRead(byte*buffer,byte len)和USBGenWrite(byte*buffer,bytelen)三個(gè)子程序組成。
⑦ usbmmap.c:主要用于檢查USB在通信過(guò)程中,端點(diǎn)號(hào)與BDT(緩沖器描述符表)之間的匹配。
⑧ user.c:直接面向用戶(hù)的應(yīng)用程序,可以幫助用戶(hù)完成自己的初始化配置、處理數(shù)據(jù)的讀/寫(xiě)、I/O口的處理,設(shè)備的請(qǐng)求等。本設(shè)計(jì)中下位機(jī)的大部分功能都是由這個(gè)程序來(lái)實(shí)現(xiàn)的,比如A/D轉(zhuǎn)換及其數(shù)據(jù)的讀取、1MHz的PWM波形產(chǎn)生等。它主要包括UserInit(void)、BlinkUSBStatus(void)、ServiceRequests(void)、ProcessIO(void)、ResetTempLog(void)和ReadPOT(void)六個(gè)子程序。
2.5 PC機(jī)軟件編程
要編寫(xiě)PC機(jī)上的軟件,可以利用Microchip公司提供的開(kāi)發(fā)工具包。該工具包是一個(gè)安裝程序,安裝后可以在安裝目錄下找到USB通用的驅(qū)動(dòng)程序、用Borland C編寫(xiě)的應(yīng)用程序、一些固件代碼,以及編寫(xiě)應(yīng)用程序所需的API函數(shù)等。對(duì)于一般的應(yīng)用,驅(qū)動(dòng)程序可以直接使用,無(wú)需重編。在編程中主要用到以下7個(gè)API函數(shù):MPUSBGetDLL Version(),返回DLL的版本號(hào);MPUSB-GetDeviceCount(),返回連接沒(méi)備的數(shù)目;MPUSBOpen(),返回指定pVID_PID和pEP的USB設(shè)備端點(diǎn)的句柄,返回的是一個(gè)端點(diǎn)句柄;MPUSBRead(),從IN端點(diǎn)讀取數(shù)據(jù)并填入緩沖區(qū);MPUSBWrite(),對(duì)一個(gè)OUT端點(diǎn)寫(xiě)入數(shù)據(jù)并使用pData緩沖區(qū);MPUSBReadInt(),從Inter-rupt IN端點(diǎn)讀取數(shù)據(jù)并填人緩沖區(qū);MPUSBClose(),關(guān)閉一個(gè)端點(diǎn)的句柄。因?yàn)镸icrochip公司提供的MPUS-BAPI.DLL源程序是用Borland C編寫(xiě)的,這一程序無(wú)法在VC環(huán)境下編譯,所以也不能產(chǎn)生隱式調(diào)用所需的.LIB文件,因此本設(shè)計(jì)在使用DLL時(shí)用的是顯式鏈接。
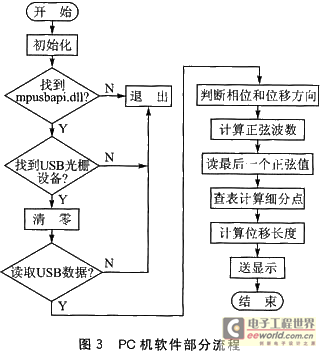
PC機(jī)的軟件部分主要用于實(shí)現(xiàn)上位機(jī)同下位機(jī)之間的USB通信,光柵位移傳感器位移信號(hào)的細(xì)分和顯示等功能。實(shí)現(xiàn)這一功能的方法有很多種,比如采用簡(jiǎn)單的VB、數(shù)據(jù)處理能力很強(qiáng)的Delphi,或國(guó)內(nèi)外廣泛采用的Borland C和VC等。為了下一步的軟件開(kāi)發(fā)以及與廠家的其他軟件接口,本系統(tǒng)上位機(jī)的軟件部分采用VC++6.0來(lái)實(shí)現(xiàn)。圖3是PC機(jī)軟件部分的流程圖。
3 結(jié) 語(yǔ)
選擇何種芯片來(lái)設(shè)計(jì)嵌入式系統(tǒng),需要根據(jù)系統(tǒng)的需求、設(shè)計(jì)的難易程度和性?xún)r(jià)比等幾個(gè)方面來(lái)考慮。Micro-chip公司為PIC18F4550系列單片機(jī)提供通用的驅(qū)動(dòng)程序、API函數(shù)、DEMO板和一系列范例程序等。其中,一些固件的端點(diǎn)與PC機(jī)通信的子程序可以直接調(diào)用,而不需要重寫(xiě),從而大大提高了開(kāi)發(fā)效率,縮短了產(chǎn)品的研發(fā)周期,這勢(shì)必會(huì)導(dǎo)致該系列單片機(jī)會(huì)很快占據(jù)一部分USB接口市場(chǎng)。正是由于USB的諸多優(yōu)點(diǎn)和光柵位移傳感器有著很多其他位移傳感器無(wú)法比擬的優(yōu)點(diǎn),因此,本設(shè)計(jì)的應(yīng)用也將會(huì)越來(lái)越廣泛。