
摘要:設(shè)計(jì)了一種簡(jiǎn)單的基于單片機(jī)的智能救援機(jī)器人小車,設(shè)計(jì)簡(jiǎn)單,易于實(shí)現(xiàn),通過現(xiàn)場(chǎng)演示,我們的設(shè)計(jì)取得了不錯(cuò)的結(jié)果。
關(guān)鍵詞:?jiǎn)纹瑱C(jī);智能救援;機(jī)器人小車
0 引言
近幾年地震災(zāi)害頻頻發(fā)生,危害較大的是2008年我國(guó)的汶川大地震和今年的日本大地震,期間全世界不知又有多少危害較小的地震,這些地震帶給人們的是慘痛的傷亡和巨大的經(jīng)濟(jì)損失。我們不能夠阻擋地震事件的發(fā)生,但我們能做的還有很多,其中對(duì)傷員的救援就是一項(xiàng)重要的工作。
當(dāng)然,災(zāi)后環(huán)境錯(cuò)綜復(fù)雜,這對(duì)救援工具的要求是一種挑戰(zhàn),同時(shí)對(duì)災(zāi)后生命的探測(cè)也是一個(gè)很重要的問題。基于這兩點(diǎn),我們?cè)O(shè)計(jì)了一種簡(jiǎn)易的智能救援機(jī)器人小車,通過現(xiàn)場(chǎng)演示,取得了不錯(cuò)的效果。
1 智能小車總體框架
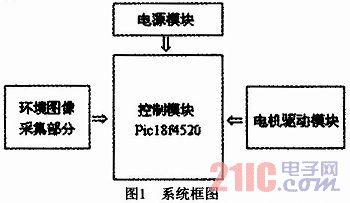
總體框架可以分為三大部分:環(huán)境圖像采集部分、電機(jī)驅(qū)動(dòng)部分和中央數(shù)據(jù)處理部分,系統(tǒng)框圖如圖1所示。
2 控制模塊
智能救援小車最重要的部件,也就是它的大腦--中央處理系統(tǒng)。它不僅負(fù)責(zé)將環(huán)境圖像采集部分送來的圖像數(shù)據(jù)進(jìn)行處理,還要將這些信息轉(zhuǎn)化成為電機(jī)的驅(qū)動(dòng)控制信號(hào),使整車按照預(yù)定的規(guī)則前行,同時(shí)還要對(duì)其他一些輔助設(shè)備進(jìn)行控制。這些一般單片機(jī)都可以實(shí)現(xiàn),而對(duì)于行駛在錯(cuò)綜復(fù)雜環(huán)境當(dāng)中的救援小車來說,有一點(diǎn)很重要,那就是對(duì)外界的抗干擾能力要強(qiáng),于是我們選擇Microchip公司的8位微控制器PIC。該控制器除了剛才說的抗干擾能力強(qiáng)之外,還具有速度快、移植性好等優(yōu)點(diǎn)。
3 電源模塊
救援小車整體采用可充電蓄電池供電。由于微控制器、攝像頭以及電機(jī)的工作電壓是不同的,我們準(zhǔn)備了兩套解決方案:一是使用模擬電路進(jìn)行穩(wěn)壓;二是使用專門的集成穩(wěn)壓芯片。通過實(shí)際操作以及比較,最終選擇了第二種方案。其主要優(yōu)點(diǎn)是:a.外圍電路簡(jiǎn)單,只需簡(jiǎn)單的濾波即可;b.可提供穩(wěn)定的輸出電壓;c.制作簡(jiǎn)單、成本低。供電系統(tǒng)框圖如圖2所示。

由于攝像頭需要一個(gè)9~12V的電壓才能正常工作,而充電電池的電壓只有6~7.2V。所以DC-DC升壓電路便成為必需。DC-DC電壓變換采用MC34063A集成電路,該器件內(nèi)部集成了溫度補(bǔ)償器、比較器、動(dòng)態(tài)電流帶限占空比可控的振蕩器和一個(gè)高電流輸出驅(qū)動(dòng)器。
4 電機(jī)驅(qū)動(dòng)模塊
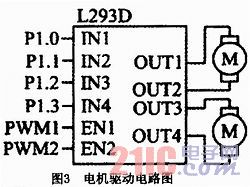
驅(qū)動(dòng)機(jī)器人行走的兩個(gè)電機(jī)需要不同的轉(zhuǎn)速來實(shí)現(xiàn)轉(zhuǎn)彎。選用的驅(qū)動(dòng)芯片為L(zhǎng)293D,它包含4個(gè)輸出通道,最大輸出峰值電流為12A,能同時(shí)驅(qū)動(dòng)兩個(gè)直流電機(jī)工作;其信號(hào)輸入端和使能端接收到來自單片機(jī)的信號(hào),控制電機(jī)的通斷以及正、反轉(zhuǎn),還可以通過向使能端輸入不
同占空比的方波信號(hào)來調(diào)整電機(jī)轉(zhuǎn)速(PWM方式)。如圖3所示,IN端口接控制信號(hào),OUT端口接電機(jī)的兩端,EN端口接使能信號(hào)。一組IN端口輸入為高/低或低/高電平時(shí),能實(shí)現(xiàn)電機(jī)的正/反轉(zhuǎn)。一組IN端口輸入均為高或低電平時(shí),電機(jī)將停轉(zhuǎn)。EN使能端為高電平時(shí),相應(yīng)端口輸入信號(hào)有效;反之,則輸入信號(hào)無效。在EN端輸入PWM波,通過調(diào)整PWM波的占空比,即可實(shí)現(xiàn)電機(jī)的無級(jí)調(diào)速。
5 越障部分
越障無疑是這款智能救援機(jī)器人的突出特色。傳統(tǒng)的救援機(jī)器人把重點(diǎn)都放在了如何救援,而忽略了路途的險(xiǎn)惡,致使救援機(jī)器人有去無回。我們充分認(rèn)識(shí)到這一點(diǎn),在越障部分做了相當(dāng)大的改進(jìn)。三個(gè)車輪通過齒輪嚙合組成一個(gè)大的車輪,當(dāng)超聲波模塊檢測(cè)障礙物時(shí),整個(gè)大的車輪翻轉(zhuǎn),使其順利越過障礙物,到達(dá)目的地,如圖4所示。

6 現(xiàn)場(chǎng)采集部分
救援現(xiàn)場(chǎng)環(huán)境復(fù)雜,存在許多潛在危險(xiǎn),救援人員恐難進(jìn)入,但救援人員又必須準(zhǔn)確掌握現(xiàn)場(chǎng)的環(huán)境,為救援工作創(chuàng)造有利的條件。通過高清攝像頭很好地解決了上述問題。為了實(shí)現(xiàn)多方位拍攝現(xiàn)場(chǎng)畫面,使用舵機(jī)來控制它的旋轉(zhuǎn)角度,減速電機(jī)控制它的升降。然后,畫面通過無線視頻傳輸模塊發(fā)送到上位機(jī)界面上,以供救援人員參考。
7 生命探測(cè)模塊
生命探測(cè)模塊也是救援機(jī)器人不可或缺的部分,因?yàn)橐刖仍畟麊T,首先需要探測(cè)傷員的位置,這就需要生命探測(cè)模塊了。
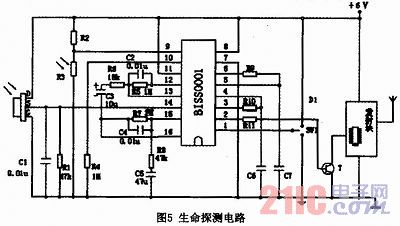
BISS0001是一款高性能的傳感信號(hào)處理集成電路。靜態(tài)電流極小,配以熱釋電紅外傳感器和少量外圍元器件即可構(gòu)成被動(dòng)式的熱釋電紅外傳感器。原理圖如圖5所示。
8 結(jié)論
基于單片機(jī),我們?cè)O(shè)計(jì)了一種簡(jiǎn)易機(jī)器人救援小車,通過現(xiàn)演示說明,我們的設(shè)計(jì)具有一定的價(jià)值和實(shí)用性。