
基于MEMS的系統(tǒng)可以顯著提高髖關(guān)節(jié)和膝關(guān)節(jié)植入體與病人骨骼結(jié)構(gòu)的對準精度,減輕不舒適感,從而避免進行修正手術(shù)。
導(dǎo)航通常與汽車、卡車、飛機、輪船,當然還有人相關(guān)。但是,它也開始在醫(yī)療技術(shù)領(lǐng)域發(fā)揮重要作用,精密手術(shù)儀器和機器人就需要使用導(dǎo)航。手術(shù)導(dǎo)航工具的設(shè)計要求與傳統(tǒng)的車輛導(dǎo)航具有廣泛的共同點,但前者也提出了一些獨特的挑戰(zhàn)(例如,由于是在室內(nèi)使用,無法獲得GPS支持),需要更高的性能。
本文將研究醫(yī)療導(dǎo)航應(yīng)用的獨特挑戰(zhàn),并且探討可能的解決方案--從傳感器機制到系統(tǒng)特性。首先將回顧傳感器的一些重要性能指標,以及在傳感器選型中應(yīng)當考慮的潛在誤差和漂移機制。本文還會重點介紹通過集成、融合和處理來增強傳感器的方法,例如通過采用卡爾曼濾波。然而,在展開詳細論述之前,回顧慣性微機電系統(tǒng)(MEMS)傳感器技術(shù)的一些基本原理可能會有幫助。
1 MEMS基本原理
一度被認為是奇思異想的MEMS技術(shù),現(xiàn)已成為我們大多數(shù)人每天都會碰到的成熟技術(shù)。它使我們的汽車更加安全,增強了手機的可用性,能夠測量和優(yōu)化工具及運動設(shè)備的性能,并且不斷提高對住院病人和門診病人的醫(yī)療護理水平。
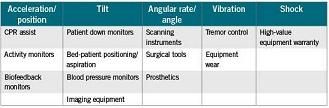
表1 按運動類型劃分的醫(yī)療應(yīng)用
用于線性運動檢測的MEMS器件通常是基于一個微加工的多晶硅表面結(jié)構(gòu),該結(jié)構(gòu)形成于硅晶圓之上,通過多晶硅彈簧懸掛在晶圓的表面上,提供對加速度力的阻力。在加速度下,MEMS軸的偏轉(zhuǎn)由一個差分電容測量,該差分電容由獨立固定板和活動質(zhì)量連接板組成。這樣,運動使差分電容失衡,導(dǎo)致傳感器輸出的幅度與加速度成正比。舉一個大家熟悉的例子,
當汽車由于碰撞而突然急劇減速時,安全氣囊傳感器中的MEMS軸會產(chǎn)生同樣的運動,使得電容失衡,最終產(chǎn)生信號觸發(fā)安全氣囊打開。這一基本加速度計結(jié)構(gòu),根據(jù)不同的應(yīng)用性能參數(shù)進行調(diào)整并增加數(shù)據(jù)處理功能后,可以精確地指示傾斜度、速度甚至位置。還有一種與此不同但技術(shù)上相關(guān)的結(jié)構(gòu)是陀螺儀,它能檢測旋轉(zhuǎn)速率,輸出形式為度/秒;加速度計則是檢測重力。
2 將運動檢測轉(zhuǎn)化為對醫(yī)療保健有用的信息
通過一個功耗極低的緊湊器件來精確檢測和測量運動的能力,幾乎對任何涉及到運動的應(yīng)用都是有價值的,甚至對那些運動要求不是很關(guān)鍵的應(yīng)用也是有價值的。表1按運動類型列出了一些基本醫(yī)療應(yīng)用。需要解決更多挑戰(zhàn)的更高級應(yīng)用將在稍后討論。
2.1 超越簡單的運動檢測
雖然簡單的運動檢測,例如一個軸上的線性運動,可能很有價值,但多數(shù)應(yīng)用都涉及到多個軸上的多種類型運動。捕捉這種多維運動狀態(tài)不僅能帶來新的好處,而且能在軸外擾動可能影響單主軸運動測量的情況下保持精度。
許多情況下,為了精確測定對象所經(jīng)歷的運動,必須將多種類型(例如線性和旋轉(zhuǎn))的傳感器結(jié)合起來。例如,加速度計對地球的重力敏感,可以用來確定傾角。換言之,讓一個MEMS加速度計在一個+/-1g重力場中旋轉(zhuǎn)時(+/-90°),它能夠?qū)⒃撨\動轉(zhuǎn)換為角度表示。然而,加速度計無法區(qū)分靜態(tài)加速度(重力)與動態(tài)加速度。這種情況下,加速度計可以與陀螺儀結(jié)合,利用組合器件的附加數(shù)據(jù)處理能力可以分辨線性加速度與傾斜(即當陀螺儀的輸出顯示旋轉(zhuǎn)與加速度計記錄的視在傾斜重合時)。隨著系統(tǒng)的動態(tài)程度(運動的軸數(shù)和運動自由度)增加,傳感器融合過程會變得更加復(fù)雜。
了解環(huán)境對傳感器精度的影響也很重要。顯而易見的一個因素是溫度,可以對其進行校準;事實上,高精度傳感器可以重新校準,并且自身進行動態(tài)補償。另一個不那么明顯的考慮因素是潛在的振動,即使很輕微的振動也會使旋轉(zhuǎn)速率傳感器的精度發(fā)生偏移,這種效應(yīng)稱為線性加速度效應(yīng)和振動校正,其影響可能很嚴重,具體取決于陀螺儀的質(zhì)量。在這種情況下,傳感器融合同樣能夠提高性能,即利用加速度計來檢測線性加速度,然后利用此信息和陀螺儀線性加速度靈敏度的校準信息進行校正。
許多應(yīng)用要求多自由度的運動檢測。例如,6自由度慣性傳感器能夠同時檢測x、y、z軸上的線性加速度和旋轉(zhuǎn)運動(也稱為滾動、俯仰和偏航),參見圖1。
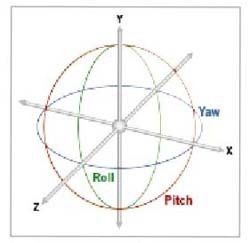
圖1 全運動評估所需的6自由度運動測量:x、y、z軸線性運動和滾動、俯仰、偏航角速率轉(zhuǎn)動
2.2 導(dǎo)航--從車輛到手術(shù)儀器
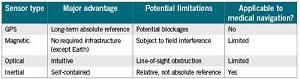
慣性傳感器在工業(yè)中用作輔助導(dǎo)航器件已經(jīng)相當廣泛。通常,慣性傳感器與GPS等其他導(dǎo)航設(shè)備一起使用。當GPS訪問不可靠時,慣性導(dǎo)航可以利用所謂航位推算技術(shù)來彌補空隙。除了最簡單的導(dǎo)航之外,多數(shù)解決方案都會依賴多種類型的傳感器,在所有條件下提供所需的精度和性能。GPS、光學(xué)和磁性檢測技術(shù)已廣為認知,相關(guān)產(chǎn)品也很豐富。然而,每種技術(shù)都有其不足之處,即使一起使用,互相之間也不能完全補償彼此的不精確性。MEMS慣性傳感器則有可能完全補償傳感器的不精確性,因為它不存在上述干擾,并且不需要外部基礎(chǔ)結(jié)構(gòu):無需衛(wèi)星、磁場或相機,只需慣性。表2列出了主要的導(dǎo)航傳感器技術(shù)及其優(yōu)缺點。
表2 廣泛應(yīng)用的導(dǎo)航傳感器及其對醫(yī)療導(dǎo)航的適用性
就像車輛導(dǎo)航設(shè)備會發(fā)生GPS遮擋問題一樣,醫(yī)療系統(tǒng)所用的光學(xué)導(dǎo)航技術(shù)也會遇到視線遮擋問題。發(fā)生光學(xué)遮擋時,慣性傳感器可以執(zhí)行航位推算,從而通過冗余檢測增強系統(tǒng)的可靠性。
2.3 醫(yī)療導(dǎo)航
符合表2所列原則的一個醫(yī)療應(yīng)用是在手術(shù)室使用慣性傳感器,使人工膝關(guān)節(jié)或髖關(guān)節(jié)能夠與病人獨特的骨骼結(jié)構(gòu)更精確地對準。本例的目標是讓植入體與患者自然軸的對準誤差小于1°。95%以上的全膝關(guān)節(jié)置換(TKA)手術(shù)采用機械對準方法,它所產(chǎn)生的典型誤差為3°或更大。使用光學(xué)對準的計算機輔助方法已經(jīng)開始取代一些機械程序,但可能由于設(shè)備開銷較大,推廣過程緩慢。無論使用機械對準還是光學(xué)對準,這些手術(shù)中大約30%都會有未對準的情況(定義為3°以上的誤差),使病人感覺不舒服,常常需要進行額外的手術(shù)。降低對準誤差的可能好處包括:縮短手術(shù)時間、增強病人舒適感以及使關(guān)節(jié)置換效果更持久。
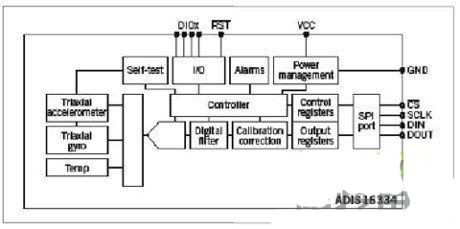
圖2 基于MEMS的慣性測量單元提供6自由度運動測量, 結(jié)構(gòu)緊湊,適合用于手術(shù)儀器
完整多軸慣性測量單元(IMU)形式的慣性傳感器已證明能夠顯著提高TKA手術(shù)的精度。ADIS16334(圖2)等器件包含所需的全部檢測功能--三個線性傳感器和三個旋轉(zhuǎn)傳感器,可取代基于機械和光學(xué)的對準技術(shù)。該器件利用多種類型的傳感器和嵌入式處理來動態(tài)校正傳感器漂移,如陀螺儀的線性加速度偏移、線性和旋轉(zhuǎn)檢測的溫度漂移等。通過標準4線串行外設(shè)接口(SPI),可以與這個相對復(fù)雜的精密傳感器套件輕松接口。
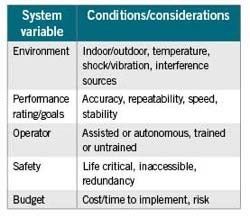
MEMS慣性傳感器可靠度高(汽車行業(yè)20年的應(yīng)用歷史證明了這一點),它在手機和視頻游戲中的成功應(yīng)用說明它在商業(yè)上極具吸引力。然而,不同應(yīng)用對性能的要求大不相同,適合游戲的器件并不能解決本文所述的高性能導(dǎo)航問題。對于導(dǎo)航,重要的MEMS性能指標是偏置漂移、振動影響、靈敏度和噪聲。精密工業(yè)和醫(yī)療導(dǎo)航所需的性能水平通常比消費電子設(shè)備所用MEMS傳感器的性能水平高出一個數(shù)量級。表3列出了有助于傳感器選型的一般系統(tǒng)考慮。
表3 系統(tǒng)目標/約束條件有助于傳感器選型
大多數(shù)系統(tǒng)都會集成某種形式的卡爾曼濾波器,以便有效合并多種類型的傳感器。卡爾曼濾波器將系統(tǒng)動力學(xué)模型、傳感器相對精度和其他特定應(yīng)用的控制輸入納入考慮,有效確定最切合實際的運動情況。高精度慣性傳感器(低噪聲、低漂移、相對溫度/時間/振動/電源變化保持穩(wěn)定)可以降低卡爾曼濾波器的復(fù)雜度,減少所需冗余傳感器的數(shù)量,以及減少對容許系統(tǒng)工作方案的限制條件數(shù)量。
3 醫(yī)療MEMS的復(fù)雜性
雖然傳感器已實現(xiàn)各種各樣的醫(yī)療應(yīng)用,從相對簡單的運動捕捉到復(fù)雜的運動分析,但醫(yī)用傳感器的高性能要求提出了復(fù)雜且涉及到大量計算的設(shè)計挑戰(zhàn)。幸運的是,解決這些新一代醫(yī)療挑戰(zhàn)所需的許多原理均基于經(jīng)工業(yè)導(dǎo)航應(yīng)用驗證的方法,包括傳感器融合和處理技術(shù)。在醫(yī)療導(dǎo)航領(lǐng)域,運動的復(fù)雜性以及精度和可靠性要求將推動多處理器、附加傳感器后處理、復(fù)雜算法、復(fù)雜測試和補償方案的發(fā)展。
在消費應(yīng)用強烈追求小尺寸、低功耗、多軸慣性傳感器的同時,某些開發(fā)人員同樣重視能夠在各種環(huán)境條件下穩(wěn)定可靠的高精度、低功耗、高性能傳感器。與現(xiàn)有測量和檢測技術(shù)相比,這些慣性MEMS器件在精度、尺寸、功耗、冗余度和可及性上均有優(yōu)勢。