
引言
無(wú)人飛機(jī)與載人飛機(jī)相比,它具有體積小、造價(jià)低、使用方便、對(duì)作戰(zhàn)環(huán)境要求低、戰(zhàn)場(chǎng)生存能力較強(qiáng)等優(yōu)點(diǎn),備受世界各國(guó)軍隊(duì)的青睞。無(wú)人駕駛飛機(jī)以其準(zhǔn)確、高效和靈便的偵察、干擾、欺騙、搜索、校射及在非正規(guī)條件下作戰(zhàn)等多種作戰(zhàn)能力,發(fā)揮著顯著的作用,并引發(fā)了層出不窮的軍事學(xué)術(shù)、裝備技術(shù)等相關(guān)問(wèn)題的研究。
高空長(zhǎng)航時(shí)無(wú)人機(jī)的飛行高度利于觀(guān)測(cè)星體,為此,考慮在慣性/SAR組合基礎(chǔ)上,采用慣性導(dǎo)航和星光組合,可以為SAR成像提供高精度的姿態(tài)信息,提高SAR成像質(zhì)量。
本文以長(zhǎng)航高空無(wú)人機(jī)成像期間對(duì)導(dǎo)航高精度要求為應(yīng)用背景,開(kāi)展了基于SAR輔助的慣導(dǎo)/星光組合導(dǎo)航研究,結(jié)合SAR工作的非連續(xù)特性,設(shè)計(jì)了SAR/慣導(dǎo)/星光組合導(dǎo)航定位方案,提出了非同步輸出多傳感器異步集中卡爾曼濾波算法,可有效提高導(dǎo)航定位系統(tǒng)的自主性和精度。
1卡爾曼濾波器設(shè)計(jì)
設(shè)位移s時(shí),飛機(jī)的位置坐標(biāo)為X(s),對(duì)于不同的位移值,均有一個(gè)X(s)值與之對(duì)應(yīng),當(dāng)取樣位移不間斷變化時(shí),就得到位置坐標(biāo)序列{X(s),X(s+1)……},飛機(jī)位置預(yù)測(cè)序列{X(s+1),X(s+2)……},該序列是系統(tǒng)噪聲等驅(qū)動(dòng)的一階遞歸模型,在x軸方向推導(dǎo)狀態(tài)方程如下:

測(cè)量方程如下:

Zx(s)為s位移時(shí)飛機(jī)坐標(biāo)x軸向的測(cè)量值。
H為測(cè)量參數(shù),它是由測(cè)量系統(tǒng)和測(cè)量方法所確定,不隨位移變化的一個(gè)常數(shù),因?yàn)槭菃文P停?,V(s)為測(cè)量噪聲。
均方估計(jì)誤差為Px(s+1)=E[Xx(s+1)—Xx(s)]2,在均方估計(jì)誤差為最小的準(zhǔn)則下,通過(guò)數(shù)學(xué)推導(dǎo),即可得出飛機(jī)自動(dòng)控制的卡爾曼濾波公式,如下:
預(yù)估計(jì)方程:

計(jì)算卡爾曼濾波增益,得:

均方預(yù)測(cè)誤差方程:

同理,可以推導(dǎo)y,z軸向的狀態(tài)方程,則飛機(jī)位置的狀態(tài)方程如下:
卡爾曼濾波是以預(yù)測(cè)加修正來(lái)實(shí)現(xiàn)濾波遞推的,其這個(gè)性質(zhì),很容易通過(guò)計(jì)算機(jī)仿真實(shí)現(xiàn),從而可以完成對(duì)飛機(jī)位置的預(yù)測(cè),預(yù)估計(jì)方程:

同時(shí),與地面基站雷達(dá)測(cè)量值進(jìn)行比對(duì),調(diào)飛機(jī)因?yàn)闄C(jī)械振動(dòng)等原因造成的位移偏差,其濾波模型為:
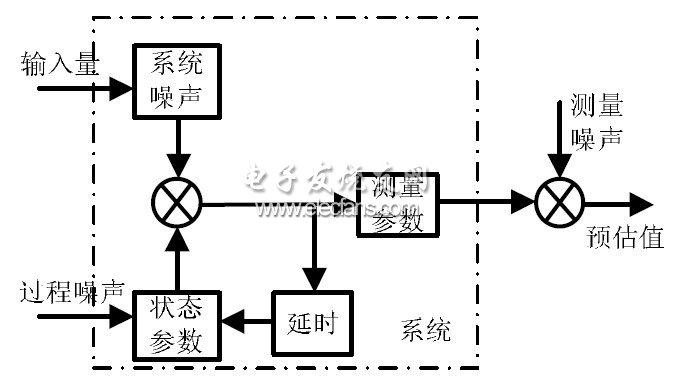
圖1卡爾曼濾波的系統(tǒng)模型框圖
2SAR輔助的慣導(dǎo)/星光組合導(dǎo)航系統(tǒng)
SAR圖像導(dǎo)航雖然具備較高的定位精度和自主性,但是其成像時(shí)僅能部分時(shí)段工作,而且對(duì)系統(tǒng)的姿態(tài)水平精度要求較高,而基于星敏感器的星光導(dǎo)航系統(tǒng)具有很高的姿態(tài)測(cè)定精度,因此,在采用慣導(dǎo)/星光姿態(tài)組合的同時(shí),分時(shí)段地接入SAR圖像導(dǎo)航信號(hào),能夠保證系統(tǒng)具有較高的定位精度和定姿精度。考慮到SAR圖像導(dǎo)航僅能分時(shí)段工作,在實(shí)際應(yīng)用過(guò)程中主要根據(jù)任務(wù)需要接入SAR圖像導(dǎo)航系統(tǒng),本文設(shè)計(jì)了如圖2所示的基于SAR輔助的慣導(dǎo)/星光姿態(tài)組合導(dǎo)航系統(tǒng)。
將慣性導(dǎo)航系統(tǒng)與衛(wèi)星定位、地理信息系統(tǒng)、里程儀組合構(gòu)成的導(dǎo)航定位系統(tǒng),既具有慣性導(dǎo)航的自主性、實(shí)時(shí)性又具有衛(wèi)星定位系統(tǒng)的高精度、誤差無(wú)積累等優(yōu)點(diǎn),有效地克服了慣性導(dǎo)航系統(tǒng)的累積誤差和漂移誤差,提高了系統(tǒng)的精度和可靠性。組合導(dǎo)航定位系統(tǒng)多用光學(xué)陀螺、機(jī)械陀螺和加速度表構(gòu)成捷聯(lián)式慣性導(dǎo)航,以地理信息匹配、衛(wèi)星定位信息、里程計(jì)信息等為輔,慣導(dǎo)信息為主,采用卡爾曼濾波技術(shù)實(shí)現(xiàn)信息的最優(yōu)綜合以獲得最佳的導(dǎo)航定位參數(shù)。
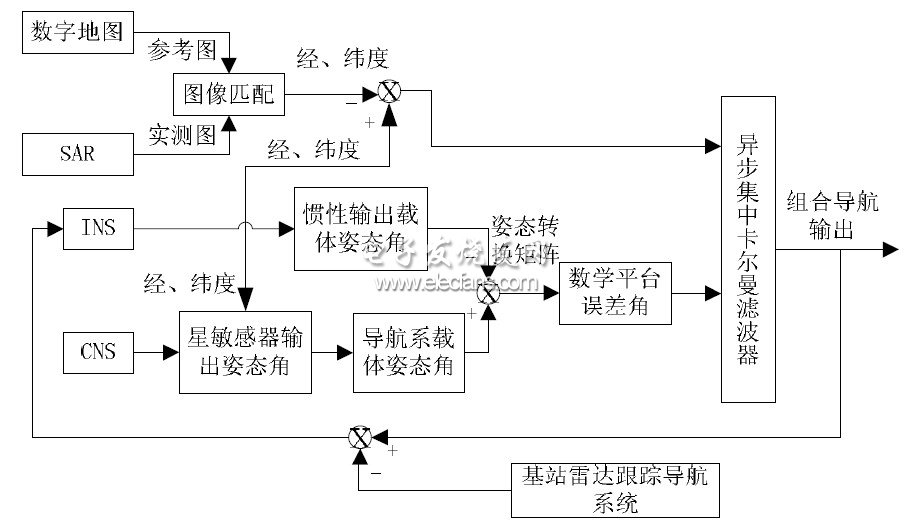
圖2基于SAR輔助的慣導(dǎo)/星光組合導(dǎo)航系統(tǒng)
從圖1可以看出:SAR輔助的組合導(dǎo)航系統(tǒng)由按照任務(wù)需要可以靈活接入的SAR圖像導(dǎo)航、慣導(dǎo)/星光姿態(tài)組合導(dǎo)航部分和地面基站雷達(dá)跟蹤系統(tǒng)三部分構(gòu)成,激光陀螺捷聯(lián)慣導(dǎo)組合最主要的特點(diǎn)是采用了激光陀螺技術(shù),與機(jī)械陀螺相比,激光陀螺無(wú)需模數(shù)轉(zhuǎn)換脈沖輸出,是捷聯(lián)式慣導(dǎo)系統(tǒng)的理想元件,而且構(gòu)成捷聯(lián)慣導(dǎo)系統(tǒng)的慣性敏感元件直接與載體相連,省去了結(jié)構(gòu)復(fù)雜的機(jī)械平臺(tái),因而較機(jī)械慣導(dǎo)系統(tǒng)體積小、重量輕、可靠性高;此外激光陀螺捷聯(lián)慣導(dǎo)組合還具有抗干擾能力強(qiáng)、啟動(dòng)時(shí)間短等技術(shù)特點(diǎn),符合飛機(jī)快速飛行以及在強(qiáng)電磁干擾背景下精確定位的實(shí)際需求,在導(dǎo)航精度、環(huán)境適應(yīng)能力、可靠性等方面可以很好地滿(mǎn)足了使用要求。雷達(dá)跟蹤系統(tǒng)導(dǎo)航輸出通過(guò)無(wú)線(xiàn)模塊發(fā)送給無(wú)人飛機(jī),其信號(hào)與組合導(dǎo)航輸出的信號(hào)構(gòu)成反饋信號(hào)。系統(tǒng)綜合運(yùn)用激光陀螺捷聯(lián)慣導(dǎo)、光學(xué)測(cè)距測(cè)角、衛(wèi)星定位、無(wú)線(xiàn)通信、數(shù)字地圖和地理信息處理,基站式雷達(dá)跟蹤等多項(xiàng)技術(shù),采用組合導(dǎo)航系統(tǒng)和自主式快速標(biāo)定方法。
3具體實(shí)現(xiàn)
飛機(jī)首先通過(guò)激光陀螺組合定位定向?qū)Ш较到y(tǒng)實(shí)現(xiàn)絕對(duì)位置、方向基準(zhǔn)的建立和動(dòng)態(tài)保持,并結(jié)合地面基站的雷達(dá)系統(tǒng)定位結(jié)果進(jìn)行誤差消除,具體實(shí)現(xiàn)過(guò)程描述如下:
(1)絕對(duì)位置和方向基準(zhǔn)的確定:飛機(jī)處于停機(jī)狀態(tài),組合定位導(dǎo)航系統(tǒng)尋北、初始對(duì)準(zhǔn),通過(guò)激光陀螺、加速度計(jì)分別測(cè)量地球自轉(zhuǎn)角速度矢量與重力場(chǎng)矢量方向,根據(jù)所在緯度區(qū)域,確定真北方向。位置基準(zhǔn)的確定是利用衛(wèi)星定位系統(tǒng)、數(shù)字地圖或地理信息得到的。
(2)位置和方向基準(zhǔn)的動(dòng)態(tài)保持:組合定位導(dǎo)航系統(tǒng)尋北、初始對(duì)準(zhǔn)完成后,進(jìn)入定位定向?qū)Ш綘顟B(tài)。在飛機(jī)飛行過(guò)程中,實(shí)時(shí)測(cè)量激光陀螺載體在慣性空間中的姿態(tài),從而可計(jì)算出慣性組合坐標(biāo)系與當(dāng)?shù)厮降乩碜鴺?biāo)系的轉(zhuǎn)換關(guān)系,實(shí)現(xiàn)動(dòng)態(tài)方向基準(zhǔn)保持。同時(shí),利用里程儀信息實(shí)現(xiàn)組合導(dǎo)航,確定飛機(jī)的位置變化。
(3)地面基站實(shí)時(shí)定位導(dǎo)航:地面設(shè)置多個(gè)基站,基站負(fù)責(zé)對(duì)飛機(jī)實(shí)時(shí)定位,并通過(guò)無(wú)線(xiàn)模塊將位置信息和速度信息發(fā)送給飛機(jī)。
(4)誤差消除:SAR輔助的組合導(dǎo)航系統(tǒng)輸出與地面雷達(dá)定位輸出形成定位誤差和速度誤差,將定位誤差作為慣性導(dǎo)航系統(tǒng)的輸入,形成一個(gè)閉環(huán)系統(tǒng),進(jìn)行誤差的消除。誤差消除過(guò)程中最關(guān)鍵的問(wèn)題在于解決多傳感器組合導(dǎo)航系統(tǒng)存在SAR和星光信息的輸出不同步的問(wèn)題,為此采用異步集中卡爾曼濾波器處理不同頻率信息的同步問(wèn)題。
4結(jié)論
飛機(jī)導(dǎo)航定位工作主要由組合定位定向?qū)Ш较到y(tǒng)完成,組合導(dǎo)航系統(tǒng)實(shí)時(shí)閉環(huán)輸出位置和姿態(tài)信息,為飛機(jī)提供精確的方向基準(zhǔn)和位置坐標(biāo),同時(shí)實(shí)時(shí)根據(jù)姿態(tài)信息對(duì)飛機(jī)飛行狀態(tài)進(jìn)行預(yù)測(cè)。組合導(dǎo)航系統(tǒng)由激光陀螺捷聯(lián)慣性導(dǎo)航、衛(wèi)星定位系統(tǒng)接收機(jī)、組合導(dǎo)航計(jì)算機(jī)、里程計(jì)、高度表和基站雷達(dá)系統(tǒng)等組成。結(jié)合了SAR圖像導(dǎo)航的定位精度、自主性和星敏感器的星光導(dǎo)航系統(tǒng)的姿態(tài)測(cè)定精度,從而保證了無(wú)人飛機(jī)的自主飛行。