
一、前言
硅微機械傳感器是用半導體硅加工工藝實現(xiàn)的傳感器。體積小使其獲得廣泛的應用前景。但是由于體積小,微小的絕對機械誤差卻產(chǎn)生較大的相對誤差,帶來運動交互干擾,即機械耦合問題。電容式硅微機械陀螺是用于測量轉動角速度的傳感器。由力學原理可知,由剛體轉動(角速度ωe)和平動(線速度vr),可產(chǎn)生一正交的加速度(科利奧里加速度,科氏加速度ac)。
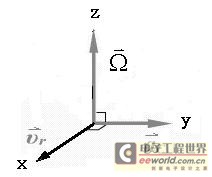
圖1 科氏加速度
Fig. 1 Coriolis acceleration
在設計微陀螺結構時,為了提高靈敏度,往往使驅動軸和敏感軸的諧振頻率盡量接近,從而增加了系統(tǒng)的機械耦合敏感性。由于制造工藝缺陷的存在,產(chǎn)生微結構質(zhì)量不均勻、梁的彈性不平衡、阻尼不對稱等制造誤差。諸多因素致使驅動軸耦合到敏感軸的振動幅度加大,即機械耦合誤差的增大,使結果產(chǎn)生一個偏移輸出。這種耦合是制約微陀螺性能提高的關鍵問題之一。因此人們提出了各種結構的微陀螺抑制機械耦合。但是由于微陀螺本身的結構特點決定了機械耦合誤差并不能被徹底消除。
目前從電路方面著手,解決這個問題的方案是假定敏感方向位移與驅動方向位移正交,用相關檢測的方法提取敏感信號。這也就是先假定無機械耦合的理想狀態(tài),然后通過電路相移微調(diào),零位直流補償緩解這一問題。
對于微陀螺,以乘法器、低通濾波等模擬電路為核心相關檢測器的任務是從大的背景干擾信號中高精度地分離出很小的科氏加速度敏感信息。通常背景干擾信號的幅度遠大于敏感信號量程。由于模擬電路的非絕對線性,干擾信號和敏感信號都存在諧波與正負半波非對稱等等問題,以乘法器、低通濾波為基礎的相關檢實際效果不佳,也不穩(wěn)定。
本文準備從文獻中已經(jīng)提出的機械耦合分析出發(fā),提出一種敏感信號的讀取方法:在耦合干擾過零點采樣。
二、機械耦合分析
我們以線振動微機械陀螺模型進行分析。對于理想化的(無機械耦合)微機械陀螺,在單測量自由度時,理論分析有
驅動方向(x軸)位移 ![]() (1)
(1)
敏感方向(y軸)位移 ![]() (2)
(2)
其中 ωd 為驅動角速度;
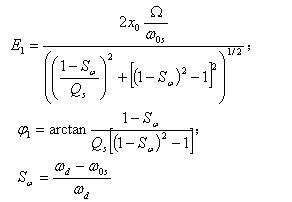
頻率敏感系數(shù);
ω0s 為敏感方向固有振動角頻率
由于φ1 的存在,x(t)和y1(t)不完全正交,頻率敏感系數(shù)隨陀螺加工不一致性有關。如果假設敏感信號電壓正比于敏感方向位移,在敏感電壓輸出中混有驅動電壓干擾,暫不考慮電路相移,在相關檢測器之前的信號輸出為
![]()
其中 A、B 為系數(shù),B干擾系數(shù);
φud 驅動電壓與驅動方向位移的相角差。
實際上,B值比較大,即使在無機械耦合的理想條件下,有用敏感信號與電干擾也不完全正交。相關檢測器參考電壓的相位調(diào)整要首先保證去除電干擾。
實際的機械耦合存在下列幾個方面:
1、質(zhì)心G 偏離坐標原點,導致振動方向偏離驅動力方向,意味著驅動振動在敏感方向會產(chǎn)生一個分量。
2、支承梁和梳齒的尺寸加工誤差會產(chǎn)生剛度耦合、剛度不對稱、驅動力不對稱以及位移檢測不對稱等誤差。
3、由于氣體阻尼和結構不對稱產(chǎn)生阻尼耦合誤差。
對于線振動電容式硅微陀螺,在X方向的驅動電壓會引起三種模態(tài)振動:驅動模態(tài),振型為敏感質(zhì)量沿X 方向的線振動;檢測模態(tài),振型為敏感質(zhì)量沿Y 方向的線振動;旋轉模態(tài),振型為敏感質(zhì)量繞Z 方向的角振動。對于理想化的(無機械耦合)硅微機械陀螺,僅驅動模態(tài)被激發(fā),如果沒有外界角速度輸入,陀螺輸出為零。受測量科氏力和機械耦合影響所產(chǎn)生的敏感加速度如圖2所示。質(zhì)心偏移和剛度耦合和驅動位移成正比,與驅動速度信號相位正交,因此剛度耦合誤差將造成陀螺的正交耦合運動。阻尼耦合誤差形成的干擾力與驅動速度成正比,該力與驅動速度信號和哥式加速度信號相位同相。由于硅微陀螺的Q值較高,特別是在真空硅微陀螺中,可以忽略阻尼干擾。一個簡化的耦合模型如圖3所示。
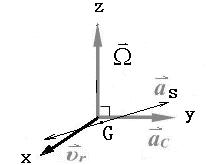
圖 2 受測量科氏力和機械耦合影響所產(chǎn)生的敏感加速度
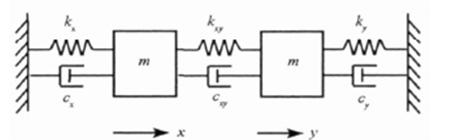
圖3 機械耦合影響下的微陀螺結構模型
Fig. 3 Vibrating gyroscope model under mechanical coupling
根據(jù)這個耦合模型得到一個近似穩(wěn)態(tài)解
![]()
其中 E2 為剛度耦合影響系數(shù),與剛度耦合系數(shù)kxy ,y方向剛度ky有關;
E3 為阻尼耦合影響系數(shù),與阻尼耦合系數(shù)Cxy ,y方向品質(zhì)因數(shù)Qy有關。
如果忽略真空硅陀螺中的同相阻尼影響,必然存在剛度耦合影響為零的時刻t0,使
![]()
當φ1很小時,敏感位移峰值應出現(xiàn)在t0附近。在非線性較大的陀螺中,也可以利用Ω=0條件,搜索到絕對值y2最小點,作為零參考點。
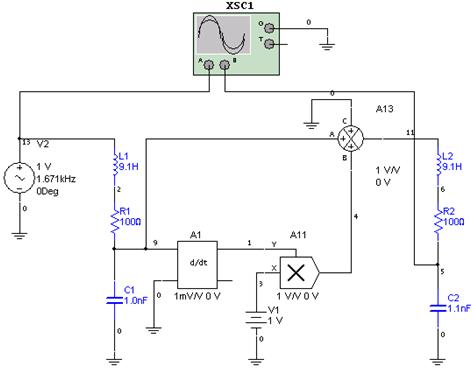
圖 4 剛度耦合的電學模型
Fig. 4 Electric model under mechanical rigidity coupling
圖4為一維振動式硅微機械陀螺的電學仿真模型。L1、R1、C1分別代表驅動軸方向的質(zhì)量、阻尼和剛度。L2、R2、C2分別代表敏感軸方向的質(zhì)量、阻尼和剛度。V2等效為驅動力。
C1、C2兩端電壓等效為驅動方向和敏感方向位移。V1代表轉動角速度。A1對驅動方向位移的微分得到速度,A11乘法運算后得到科氏力。A13將剛度耦合與科氏力合成為敏感軸方向的驅動力。通過這個模型可以仿真不同條件下的敏感輸出與驅動力V2的相位關系。也可以研究剛度耦合與敏感輸出的相位關系。圖4的近似仿真,主要是用于電路設計討論。
三、采樣方法設計
根據(jù)以上分析,應該在機械耦合最小時采集敏感信號。由于正反向振動機械耦合可能不一致,機械耦合最小時刻應分別選取。利用振動時機械運動的慣性,在采樣時關斷驅動電壓信號,消除電耦合干擾。
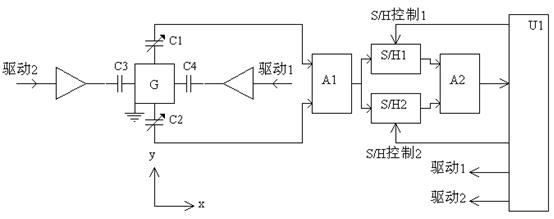
圖 5 采集與驅動框圖
G 微陀螺機械振動塊;C1、C2 敏感電容; C3、C4 驅動電容;A1 差動電容調(diào)理電路;A2 差動放大器; S/H1、S/H2 采樣保持器;U1 采集控制單片機
Fig. 5 sample and driver block
G vibration block of micromachined gyroscope;C1,C2 sensing capacitor; C3,C4 driving capacitor;A1 conditioner of differential capacitor; A2 differential amp.;S/H1,S/H2 simple-holder; U1 SCM
圖5為采集與驅動框圖。控制時序由U1完成。為了精確控制時序,采用時鐘頻率較高的DSP器件,本實驗采用的是TMS320F2810。控制時序如圖6所示,采樣時序脈沖發(fā)生在振動質(zhì)量塊過靜態(tài)平衡點。實驗過程:通過顯微鏡觀察初步確定諧振頻率范圍;在零轉速條件下,通過改變驅動頻率尋找機械耦合最大的頻率,并在有轉速條件下,搜索信號輸出最大的驅動頻率,雙方面驗證找到機械諧振頻率;在零轉速條件下搜索到機械耦合最小的同步采樣時刻。在這個時刻一般有轉速時的敏感信號也接近最大值。初步試驗結果:驅動周期3017Hz,轉臺轉速0.1Hz,10次平均,數(shù)字輸出信號跳動1%。
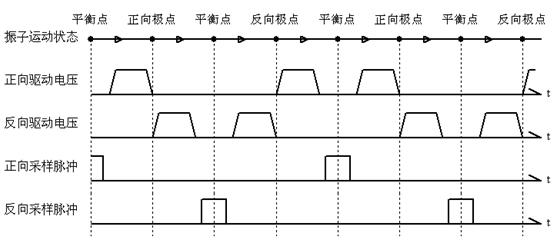
圖 6 控制時序
Fig. 6 control order
各脈沖可通過片上外設PWM接口送出,基本上不耗費軟件時間。對于確定的硅微陀螺,一旦最初的搜索、標定完成后,脈沖時序便成為固定常數(shù)。正常運行時,軟件僅完成簡單的補償修正工作。進一步還可以考慮用SOC器件,把S/H1、S/H2、A2、A/D、PWM、CPU等功能由一只芯片完成。
四、結束語
任何硅微陀螺都不可避免地存在機械耦合干擾,本文分析指出存在干擾影響最小的可供對敏感信號采樣時刻。這個采樣時刻靠近敏感信號的峰值點。結合以前文章[]所提出的采樣時關斷驅動信號方法,可提高硅微陀螺的性能。筆者認為,由于各微陀螺儀諧振頻率的差異,直接檢測質(zhì)量塊過平衡點時刻的方法還需研究。這將是以后進一步的研究。