
1 超聲波測距原理
超聲波測距原理是利用超聲波從發(fā)射到接收過程中傳播的時間來計算出傳播距離,。本文的倒車?yán)走_系統(tǒng)采用反射接收回波方式。設(shè)l為測量距離,,t為往返時間差,,超聲波的傳播速度為c,則有t=2l/c,,而聲波在空氣中傳輸速率為 ,。式中T為環(huán)境溫度;cO為絕對溫度時的速度,,是常數(shù),。從上述兩式可以推出
,。式中T為環(huán)境溫度;cO為絕對溫度時的速度,,是常數(shù),。從上述兩式可以推出![]() ,故利用超聲波測量的距離與時間和環(huán)境溫度有關(guān),,在本系統(tǒng)中利用AT89S52中的定時器測量超聲波傳播時間,,利用DSl8820測量環(huán)境溫度,從而提高測距精度,。
,故利用超聲波測量的距離與時間和環(huán)境溫度有關(guān),,在本系統(tǒng)中利用AT89S52中的定時器測量超聲波傳播時間,,利用DSl8820測量環(huán)境溫度,從而提高測距精度,。
2 硬件設(shè)計
2.1 系統(tǒng)硬件總體設(shè)計
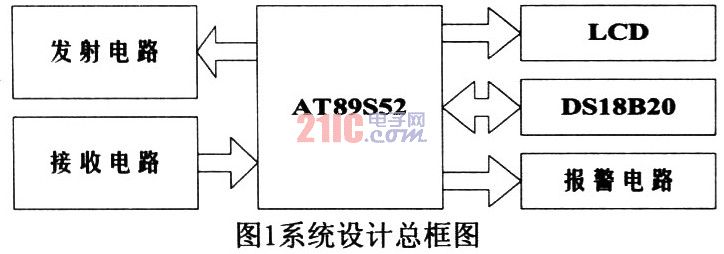
如圖1所示,,本系統(tǒng)硬件部分由AT89S52控制器、超聲波發(fā)射電路,、接收電路,、溫度測量電路,聲音報警電路和LCD顯示電路組成,。汽車行進時LCD顯示環(huán)境溫度,,當(dāng)?shù)管嚂r,發(fā)射和接收電路工作,經(jīng)過AT89S52數(shù)據(jù)處理將距離也顯示到LCD上,,如果距離小于設(shè)定時,,報警電路會鳴叫,提醒司機注意車距,。AT89S52是主控芯片,,支持在線下載程序,方便調(diào)試,,有8kB的Flash,、32個I/O口、三個16位定時/計數(shù)器,、八個中斷源,、全雙工UART串行口和看門狗定時器等,資源豐富,,既滿足了本系統(tǒng)的設(shè)計要求,,也滿足了日后擴展的需求。
2.2 超聲波發(fā)射電路
超聲波發(fā)射器包括超聲波產(chǎn)生電路和超聲波發(fā)射控制電路兩部分,,超聲波探頭選用CSB40T,。可采用軟件發(fā)生法和硬件方法產(chǎn)生超聲波,。本系統(tǒng)利用軟件產(chǎn)生40kHz的超聲波信號,,經(jīng)過74HC04兩次和一次反向放大驅(qū)動后輸出到CSB40T,如圖2所示,。
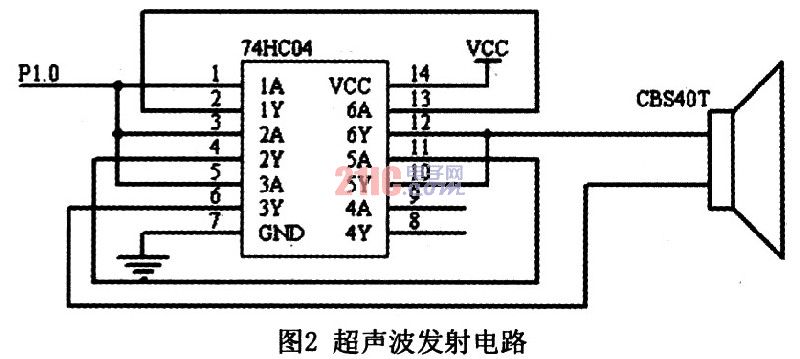
74HC04是一個高速CMOS六反相器,,具有對稱的傳輸延遲和轉(zhuǎn)換時間,而相對于LSTTL邏輯IC,,它的功耗減少很多,。對于HC類型,其工作電壓為2~6V,,它具有高抗擾度,,可以兼容直接輸入LSTTL邏輯信號和CMOS邏輯輸入。
2.3 超聲波接收電路
由于超聲波在空氣中傳播,,其能量會隨傳輸距離的增大而減小,,從遠距離障礙物反射的回波信號一般比較弱,所以在設(shè)計超聲波接收電路時,,要有較大的放大倍數(shù),;為減小環(huán)境噪聲對回波信號的影響,也要考慮選用濾波特性較好的電路,,使回波易于檢測,。超聲波接收電路使用集成電路CX20106A,,可用來完成信號的放大、限幅,、帶通濾波,、峰值檢波和波形整形等功能,如圖3所示,。
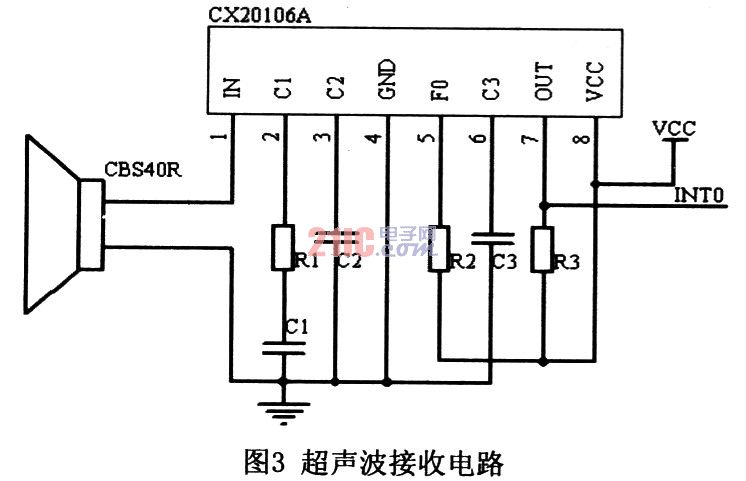
其中的前置放大器具有自動增益控制功能,,可以保證在超聲傳感器接收較遠反射信號輸出微弱電壓時,放大器有較高的增益,,在近距離輸入信號強時放大器不會過載,;其帶通濾波器中心頻率可由芯片5腳的外接電阻調(diào)節(jié),不需要外接電感,,可避免外磁場對電路的干擾,,可靠性較高。CX20106A接收超聲波有很高的靈敏度和抗干擾能力,,可以滿足接收電路的要求,。同時,使用集成電路也可以減少電路之間的相互干擾,,減小電噪聲,。當(dāng)接收到40kHz信號后,芯片7腳會出現(xiàn)較短的低電平,,接入單片機便可以使單片機產(chǎn)生中斷,。
2.4 溫度測量電路
由于超聲波的傳播速度v會受溫度、濕度,、壓強等的影響,其中溫度的影響尤為嚴(yán)重,。因此在測量精度要求高的場合,,應(yīng)通過溫度補償對超聲波的傳播速度進行校正,以減小誤差,。
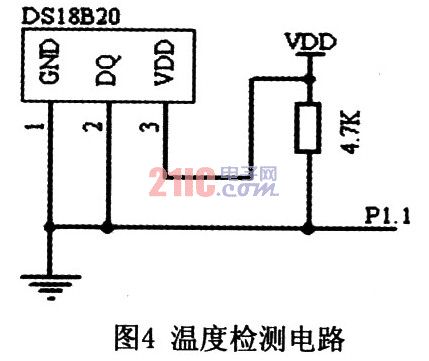
本系統(tǒng)采用DALLAS公司的DSl8820數(shù)字式溫度傳感器進行溫度測量,,它所測量的溫度值用9位二進制數(shù)直接表示,這些值通過DSl8820的數(shù)據(jù)總線直接輸入CPU,,無需A/D轉(zhuǎn)換,,而且讀寫指令、溫度轉(zhuǎn)換指令都是通過數(shù)據(jù)總線傳入DSl8820,,無需外部電源,。DSl8820數(shù)字溫度傳感器與AD590、LM35等溫度傳感器相比,,具有相當(dāng)?shù)臏y溫范圍和精度,,溫度測量精確,、不受外界干擾等優(yōu)點。硬件結(jié)構(gòu)如圖4所示,。
2.5 顯示電路
本系統(tǒng)中的顯示部分采用1602LCD液晶顯示,。具體接口如圖5所示。
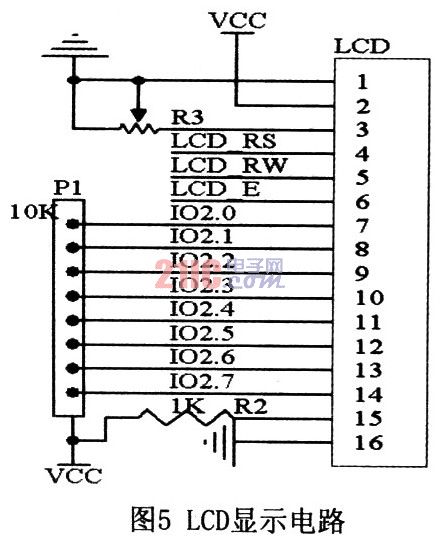
如上圖,,有兩組電源,,一組是模塊的電源 一組是背光板的電源 均為5V供電。R3是調(diào)節(jié)對比度的引腳,,調(diào)節(jié)此腳上的電壓可以改變黑白對比度,。RS是很多液晶上都有的引腳,是命令/數(shù)據(jù)選擇引腳,,該腳電平為高時表示將進行數(shù)據(jù)操作,;為低時表示進行命令操作。RW也是很多液晶上都有的引腳,,是讀寫選擇端,,該腳電平為高時表示要對液晶進行讀操作;為低時表示要進行寫操作,。同樣,,很多液晶模塊有E引腳,通常在總線上信號穩(wěn)定后給一正脈沖通知把數(shù)據(jù)讀走,,在此腳為高電平的時候總線不允許變化,。DO~D7 8位雙向并行總線,用來傳送命令和數(shù)據(jù),。BLA是背光源正極,,BLK是背光源負(fù)極。
3 軟件設(shè)計
本系統(tǒng)的軟件設(shè)計采用模塊化設(shè)計,,由主程序,、超聲波發(fā)射子程序、超聲波接收子程序,、溫度補償子程序,、報警子程序以及顯示子程序組成。主程序流程圖如圖6所示,。
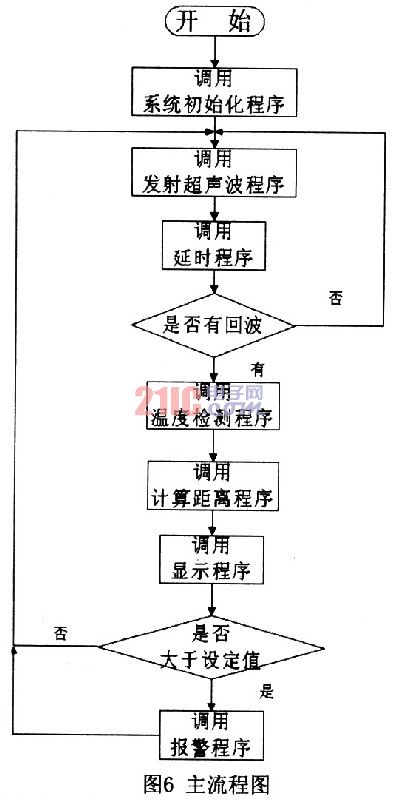
超聲波倒車?yán)走_系統(tǒng),,最重要的就是對發(fā)射信號的控制及接收測量的時機控制。在設(shè)計中,,AT89S52對發(fā)射的控制就是對40kHz方波產(chǎn)生電路的控制,。由AT89S52的Pl.0口控制超聲波發(fā)射電路以6個脈沖的序列發(fā)射出去,在程序中用延時實現(xiàn),。脈沖發(fā)射同時打開定時器T0開始計時,,發(fā)射后等待1ms打開外部中斷INT0,,等待回波反射到接收探頭。等待1ms的原因是,,超聲波發(fā)射探頭發(fā)射的超聲波一般都會存在余波干擾,,有部分聲波會直接傳到接收探頭,經(jīng)接收電路放大后,,系統(tǒng)就會把它誤認(rèn)為是檢測的回波信號,,發(fā)射后等待1ms可以避免檢測到余波信號,當(dāng)然這也會導(dǎo)致測量盲區(qū)的存在,。
4 結(jié)論
為了證明本文設(shè)計的倒車?yán)走_系統(tǒng)的可靠性,,在內(nèi)部進行了實地測量。本系統(tǒng)測距范圍為0.2~5m,。最大誤差小于3cm,。因此,本系統(tǒng)具有工作穩(wěn)定,、抗干擾能力強,、靈敏度高的特點。