
1 引言
汽車工作過程中,對(duì)各系統(tǒng)的運(yùn)行參數(shù)的實(shí)時(shí)測量可方便地實(shí)現(xiàn)對(duì)汽車運(yùn)行狀態(tài)的分析與故障診斷。用傳統(tǒng)的有線方式連接汽車診斷接口或檢測傳感器輸出值的方法存在著布線和設(shè)備使用等方面的不方便。如果能把汽車各系統(tǒng)中的參數(shù)值無線、快速、準(zhǔn)確地測量出來,利用功能強(qiáng)大的微機(jī)系統(tǒng)進(jìn)行分析和處理將大大方便汽車運(yùn)行狀態(tài)的監(jiān)控。本文提出并實(shí)現(xiàn)了一種利用單片機(jī)組成CAN系統(tǒng),利用藍(lán)牙無線傳輸技術(shù)對(duì)汽車運(yùn)行數(shù)據(jù)進(jìn)行采集與處理的方法。
隨著汽車電子的發(fā)展,汽車內(nèi)電子產(chǎn)品越來越多,汽車發(fā)動(dòng)機(jī)、底盤和車身等電控系統(tǒng)中的電控單元數(shù)量不斷增加,同時(shí)它們之間的通信也越來越重要。在汽車內(nèi)利用網(wǎng)絡(luò)技術(shù),可大大提高系統(tǒng)之間信息傳遞的可靠性,同時(shí)可大大減少汽車線束的數(shù)量,降低汽車電氣系統(tǒng)的成本。近年來,CAN系統(tǒng)在汽車內(nèi)的應(yīng)用越來越廣泛。CAN(ControllerAreaNetwork)是控制局域網(wǎng)的簡稱,最早由德國BOSCH公司推出,用于汽車內(nèi)部測量與執(zhí)行部件的數(shù)據(jù)通信。由于其高性能、高可靠性、實(shí)時(shí)性好和獨(dú)特的設(shè)計(jì),已廣泛的應(yīng)用于控制系統(tǒng)的各檢測和執(zhí)行機(jī)構(gòu)之間的數(shù)據(jù)通信。CAN總線符合ISO11898標(biāo)準(zhǔn),最大傳輸速率可達(dá)1Mbps,最大傳輸距離為10km,傳輸介質(zhì)可為雙絞線。它具有如下的一些技術(shù)特性:
1)多主方式工作,非破壞性的基于優(yōu)先權(quán)的總線仲裁技術(shù);
2)采用短幀結(jié)構(gòu),受干擾概率低,每幀信息都有CRC檢驗(yàn)及其他檢錯(cuò)措施;
3)對(duì)嚴(yán)重錯(cuò)誤具有自動(dòng)關(guān)閉總線的功能,使總線的其他操作不受影響。
在汽車運(yùn)行過程中,車載射頻裝置如汽車立體聲系統(tǒng)、GPS導(dǎo)航設(shè)備、衛(wèi)星數(shù)字音頻無線電業(yè)務(wù)(SDARS)裝置、GSM無線電收發(fā)器以及其它電器設(shè)備均可能造成干擾或受到干擾,這些射頻干擾信號(hào)會(huì)對(duì)汽車無線系統(tǒng)的數(shù)據(jù)流造成不良影響。如果應(yīng)用傳統(tǒng)的無線數(shù)據(jù)傳輸技術(shù),傳輸?shù)臄?shù)據(jù)的速率和準(zhǔn)確率都不能很高,從而不能實(shí)現(xiàn)快速、準(zhǔn)確地進(jìn)行數(shù)據(jù)的傳輸,而把藍(lán)牙無線傳輸技術(shù)用在汽車上可以很好地解決這個(gè)問題。
本文所用藍(lán)牙模塊采用英國CSR公司的BC417芯片,并與SST公司的8M的FLASH芯片39VF800A構(gòu)成了模塊。
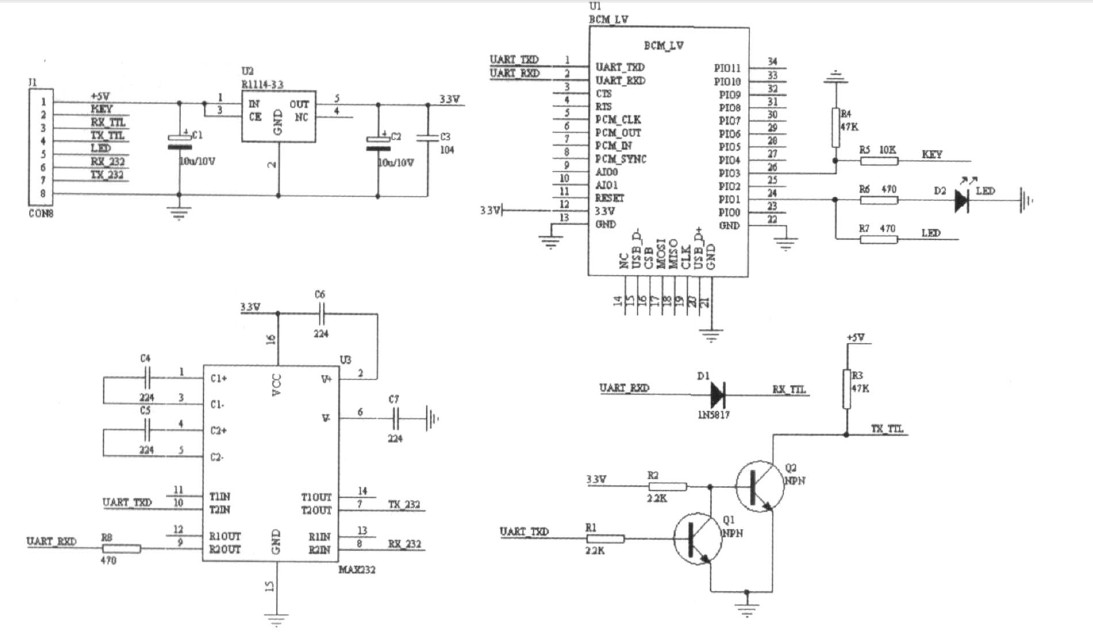
圖1 藍(lán)牙模塊原理圖
此模塊的主要特點(diǎn)如下:
1)采用CSR主流藍(lán)牙芯片,符合藍(lán)牙V210標(biāo)準(zhǔn)。
2)串口模塊上底板帶有RS232接口和TTL接口,任選一種接口使用,使用313~5V電源。串口對(duì)用戶而言是透明的。
3)藍(lán)牙芯片采用向前糾錯(cuò)編碼,通信效率高,自動(dòng)跳頻,抗干擾能力強(qiáng)。
4)波特率為1200,2400,4800,9600,19200,38400,57600,115200,230400,460800,921600,1382400,可在程序中根據(jù)實(shí)際需要設(shè)置。
5)休眠電流:小于1MA,工作電流:40MA。
2 系統(tǒng)硬件結(jié)構(gòu)原理圖
本文利用MICROCHIP公司的內(nèi)嵌CAN控制器的18F4580芯片與CAN收發(fā)器芯片MCP2515構(gòu)成CAN網(wǎng)絡(luò)系統(tǒng),并用18F4580芯片自帶的10位AD傳感器實(shí)現(xiàn)了對(duì)汽車發(fā)動(dòng)機(jī)節(jié)氣門位置信號(hào)的測量,同時(shí)利用智能數(shù)字傳感器DS18B20對(duì)發(fā)動(dòng)機(jī)的水溫信號(hào)進(jìn)行測量。利用藍(lán)牙模塊把測量的信號(hào)無線傳給上位機(jī),利用VC++編寫數(shù)據(jù)接收與處理的程序?qū)崿F(xiàn)數(shù)據(jù)的實(shí)時(shí)顯示與存儲(chǔ),并可顯示數(shù)據(jù)值隨時(shí)間的變化關(guān)系曲線圖,測量結(jié)果直觀。系統(tǒng)的硬件原理圖如圖2所示。
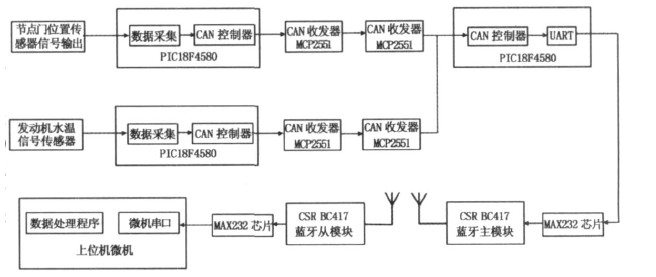
圖2 測量系統(tǒng)原理圖
3 發(fā)動(dòng)機(jī)節(jié)氣門位置信號(hào)與水溫信號(hào)的測量
3.1 節(jié)氣門信號(hào)信號(hào)的測量
這里測量的汽車發(fā)動(dòng)機(jī)上節(jié)氣門位置傳感器為一可調(diào)電阻型,節(jié)氣門位置輸出信號(hào)為0~5V的電壓信號(hào),根據(jù)節(jié)氣門的實(shí)際開度與輸出電壓的關(guān)系,對(duì)測量的電壓信號(hào)進(jìn)行標(biāo)定,根據(jù)實(shí)測的電壓信號(hào)即可換算成節(jié)氣門的開度。所以這里用PIC18F4580單片機(jī)內(nèi)嵌的10位AD轉(zhuǎn)換電路完成對(duì)節(jié)氣門位置傳感器輸出電壓的測量,為提高測量精度,對(duì)單片機(jī)AD的5V基準(zhǔn)電壓進(jìn)行了與系統(tǒng)電源隔離穩(wěn)壓處理。
本系統(tǒng)利用Microchip公司的MPLAB開發(fā)環(huán)境嵌入PICC18C程序編譯器,用C程序編寫了數(shù)據(jù)采集與CAN數(shù)據(jù)的收發(fā)程序,其中AD轉(zhuǎn)換子程序用匯編語言編寫,程序兼顧了C程序的模塊化和可維護(hù)性好的優(yōu)點(diǎn),同時(shí)具有了匯編語言高效率的優(yōu)點(diǎn)。
信號(hào)通過CAN控制器用擴(kuò)展幀格式發(fā)送到CAN網(wǎng)絡(luò)上。其中數(shù)據(jù)采集與CAN數(shù)據(jù)的發(fā)送子程序如下:
InitSPI();//SPI接口初始化
Init_MCP2515();//MCP2515初始化
……
TRISA=0B00000001;//AN0>>>>DCinputDC通道上輸入,打開RA0
ADCON0=0B00000001;//AN0通道,允許ADC工作,
ADCON1=0B00001110;//除RA0為模擬輸入口外,其他RA口跟RE口均為普通數(shù)字口
ADCON2=0B10100001;//轉(zhuǎn)換結(jié)果右對(duì)齊,8TAD,1/8FOSC。
#asm
ADCON0EQU0FC2H
GOEQU001H
bsfADCON0,GO//開始轉(zhuǎn)換
ADWAIT:
btfscADCON0,GO
gotoADWAIT//等待轉(zhuǎn)換完成
#endasm
write_MCP2515(TXB0CTRL,0x03);//設(shè)置為發(fā)送最高優(yōu)先級(jí)
write_MCP2515(TXB0SIDH,0xFF);//EID28--21
write_MCP2515(TXB0SIDL,0xEB);//EID20--EID18,擴(kuò)展幀使能,EID17--EID16
write_MCP2515(TXB0EID8,0xFF);//EID15--EID8
write_MCP2515(TXB0EID0,0xFF);//EID7--EID0
write_MCP2515(TXB0DLC,0x02);//發(fā)送數(shù)據(jù)長度為8字節(jié)
write_MCP2515(TXB0D0,ADRESH);//發(fā)送的數(shù)據(jù)
write_MCP2515(TXB0D1,ADRESL);
……
send_TXB0();//請(qǐng)求發(fā)送
while((read_MCP2515(TXB0CTRL)&0x08)==0x08);//等待
發(fā)送完畢
……
3.2 水溫信號(hào)的測量
本文中的水溫信號(hào)利用DALLAS公司的DS18B20智能數(shù)字傳感器測量。DS1820是世界上第一片支持“一線總線”接口的溫度傳感器。一線總線獨(dú)特而且經(jīng)濟(jì)的特點(diǎn),使用戶可輕松地組建傳感器網(wǎng)絡(luò),為測量系統(tǒng)的構(gòu)建引入全新概念。測量溫度范圍為-55℃~+125℃,在-10~+85℃范圍內(nèi),精度為±015℃。現(xiàn)場溫度直接以“一線總線”的數(shù)字方式傳輸,大大提高了系統(tǒng)的抗干擾性。適合于惡劣環(huán)境的現(xiàn)場溫度測量,如:環(huán)境控制、設(shè)備或過程控制、測溫類消費(fèi)電子產(chǎn)品等。DS1820采集溫度信號(hào)完成后,通過PIC18F4580芯片接收數(shù)據(jù),并通過內(nèi)嵌CAN控制器把數(shù)據(jù)以8位二制數(shù)的格式用標(biāo)準(zhǔn)幀格式發(fā)送到CAN總線上。
4 CAN網(wǎng)絡(luò)的傳輸系統(tǒng)
采集到的信號(hào)通過PIC18F4580內(nèi)嵌的CAN控制器發(fā)出。這里選用MICROCHIP公司出品的MCP2551CAN收發(fā)器完成網(wǎng)絡(luò)信號(hào)的傳遞,在CAN網(wǎng)絡(luò)終端加入阻值為120歐的終端電阻。CAN網(wǎng)絡(luò)接收端的收發(fā)器接收到的信號(hào)后傳遞給另一片PIC18F4580芯片,通過基內(nèi)部的CAN控制器取出網(wǎng)絡(luò)信號(hào),如果接收到擴(kuò)展幀,則接收到的數(shù)據(jù)為節(jié)氣門的位置信號(hào);接收到標(biāo)準(zhǔn)幀,則接收到的數(shù)據(jù)為水溫信號(hào)。對(duì)信號(hào)處理后以數(shù)據(jù)包的方式通過基自身的UART口發(fā)給MAX232芯片,把TTL信號(hào)電平轉(zhuǎn)換成232電平。節(jié)氣門部分的CAN通訊板硬件原理圖如圖3所示。
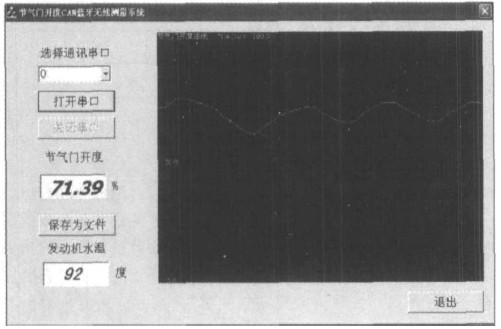
圖3 節(jié)氣門位置信號(hào)測量CAN通信板原理圖
5 藍(lán)牙無線傳輸系統(tǒng)
MAX232芯片把轉(zhuǎn)換后的信號(hào)傳給由CSR公司的BC417構(gòu)成的藍(lán)牙主(發(fā)射)模塊。BC417藍(lán)牙模塊可以設(shè)定數(shù)據(jù)傳輸速率,在保證發(fā)射信號(hào)的質(zhì)量的情況下,可以盡量采用高速率的傳輸。本文中的傳輸速率為38400bps。另一塊BC417藍(lán)牙芯片構(gòu)成的從(接收)模塊在接收到數(shù)據(jù)信號(hào)后,通過MAX232芯片轉(zhuǎn)換電平傳給上位機(jī)微機(jī)的串口。
6 上位機(jī)信號(hào)接收處理系統(tǒng)
上位機(jī)微機(jī)的串口接到信號(hào)后,用VC++開發(fā)工具編寫了面向?qū)ο蟮某绦驅(qū)?shù)據(jù)包進(jìn)行處理。為了直觀的顯示數(shù)據(jù)的數(shù)值和其隨時(shí)間的變化關(guān)系,本程序可顯示實(shí)際節(jié)氣門位置信號(hào)與水溫的數(shù)值,另可顯示節(jié)氣門位置信號(hào)的變化曲線。上位機(jī)程序的界面如圖4所示。
本文利用的是SerialPort類來實(shí)現(xiàn)此功能,這種方法對(duì)使用者來說只要關(guān)心設(shè)定相關(guān)的通訊參數(shù),而不用關(guān)心封裝的實(shí)現(xiàn)方法,程序的模塊化和維護(hù)性好[5]。在使用中采用串口事件響應(yīng)方式工作。為了更直觀的顯示出數(shù)據(jù)隨時(shí)間變化的曲線,編寫了一個(gè)利用封裝的BUTTON類控件實(shí)現(xiàn)的顯示界面。此控件可方便地實(shí)現(xiàn)對(duì)數(shù)據(jù)的坐標(biāo)、背景、數(shù)據(jù)的單位與數(shù)據(jù)的更新速度等屬性進(jìn)行設(shè)定,顯示效果良好。

圖4 上位機(jī)界面圖
7 結(jié)論
該系統(tǒng)運(yùn)行良好,能方便、快速、可靠地實(shí)現(xiàn)汽車運(yùn)行參數(shù)的測量,為實(shí)現(xiàn)汽車網(wǎng)絡(luò)參數(shù)的無線實(shí)時(shí)測量與汽車故障診斷提供了一個(gè)較好的平臺(tái)。程序運(yùn)行結(jié)果顯示此藍(lán)牙無線傳輸CAN測量系統(tǒng)有如下優(yōu)點(diǎn):
1)在測量汽車運(yùn)行參數(shù)時(shí),可利用多個(gè)單片機(jī)構(gòu)成CAN測量網(wǎng)絡(luò),充分利用了CAN網(wǎng)絡(luò)的優(yōu)點(diǎn):信號(hào)抗干擾能力強(qiáng)、數(shù)據(jù)速率快、數(shù)據(jù)可靠性高與系統(tǒng)連接線少等。
2)無線數(shù)據(jù)傳輸系統(tǒng)充分體現(xiàn)了藍(lán)牙系統(tǒng)的高速和藍(lán)牙協(xié)議的高可靠性,理論上數(shù)據(jù)的成功率為100%,實(shí)現(xiàn)了高速和可靠的數(shù)據(jù)傳遞。
3)在用上位機(jī)測量汽車運(yùn)行參數(shù)時(shí),在汽車與電腦之間無需任何線纜的連接,方便測量系統(tǒng)的組建,降低了系統(tǒng)組建的時(shí)間和成本。
4)可充分利用上位機(jī)計(jì)算與處理的優(yōu)勢,相比于傳統(tǒng)的汽車檢測儀器,可實(shí)現(xiàn)功能更強(qiáng)大的數(shù)據(jù)處理能力。