
引言
為了用較低的成本完成大量程液位的長期可靠測量,筆者利用MSP430單片機的低功耗特性結合光電液位的絕對位置測量功能設計了一種新型液位計—磁光液位計,現(xiàn)簡要介紹如下。
1 機械工作原理
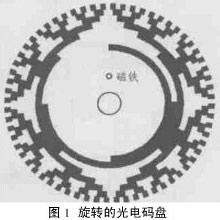
本液位計同普通光電液位計一樣有一個光電碼盤(如圖1所示),碼盤白色部分反射光線,而黑色部分吸收光線,圖2所示的光耦和圖1所示的碼盤間距約2mm,并采用圓心安裝。光耦隨電路板固定在液位計外殼上,液位變化時浮子牽引水位輪轉動,安裝在同一軸上的碼盤也隨水位輪作圓周運動,當碼盤旋轉時,碼盤就會吸收或反射來自光耦的光線,從而使8位光耦根據(jù)碼盤和光耦的相對位置輸出8位格雷碼編碼,傳統(tǒng)的光電液位計用一個減速齒輪帶動另一個碼盤轉動從而獲得高位編碼,而本液位計摒棄了所有的齒輪減速機構,用安裝角度為120°的三只干簧管來計算碼盤旋轉的圈數(shù),當碼盤旋轉時安裝于其上的磁鐵依次吸合三只干簧管,根據(jù)這一次序就可以判斷液位是以液位上升的方向增加圈數(shù)還是以液位下降的方向減少圈數(shù)。這樣一來單圈的絕對位置可以通過碼盤的編碼得到,而旋轉的圈數(shù)可以由干簧管的吸合次序得到,綜合起來就可以得到液位高程,從而完成液位的測量。

2 MSP430單片機簡介
MSP430系列是TI公司的超低功耗單片機,它有多種低功耗模式,在LPM4模式時的典型工作電流僅為0.1μA,并能在6μs內響應外部中斷;另外它還有特別寬的工作電壓范圍:1.8~3.6V,實際使用中發(fā)現(xiàn):常溫下即便電源電壓為1.2V,該器件仍能全速正常工作。MSP430F133的性能特征見表1。
表1 MSP430F133的性能特征

設計時選用一只1F的電容來儲存電能,假設加上12V電源后電路充電電流為100mA,充電時間為2s,則按0.5μA(實際放電電流不大于此數(shù)據(jù)值)放電可持續(xù)110小時。因此只要液位測量間隔不大于110小時就能保證單片機在掉電期間正常工作。在本電路中MSP430平時以內部RC振蕩器作為主時鐘,以鐘表晶體振蕩器(32768Hz)作為通信時鐘,最高通信速率可達9600bps,低功耗LPM4時關閉所有時鐘源。
3 電路工作原理
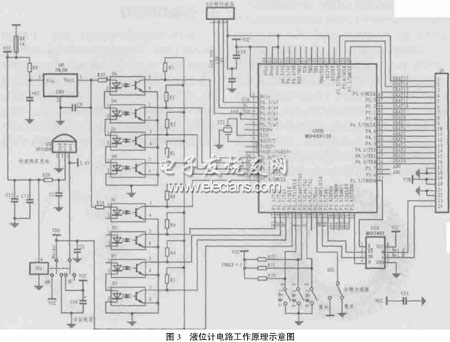
圖3所示是本液位計電路的工作原理圖,當測量當前液位時,首先由上位控制器給電路加12V電源,此時繼電器JD1吸合,一方面由R28、U3組成的穩(wěn)壓電路給電容C46進行恒流限壓充電,以補充斷電后單片機工作所需電能,另一方面將Wake信號由“0”切換到“1”,喚醒單片機進入全速正常工作狀態(tài),通過測量8只光電耦合器電平可得到碼盤在一個圓周內的具體位置編碼(8bit格雷碼),再加上正(反)向旋轉的圈數(shù)就可以計算出實際液位,也可換算成格雷碼輸出以兼容其它浮子式液位計,同時還通過485總線按要求的協(xié)議輸出液位以滿足自動測量的要求。6位液晶顯示器用于在本地顯示液位值,其電源由單片機的口線來提供,目的也是便于在掉電時關閉液晶顯示器的電源。
一旦外部+12V電源撤去,Wake信號將消失,單片機立即將口線切換到合適的電平,并進入低功耗狀態(tài)LPM4,此時CPU的功耗只有0.1μA,碼盤上的磁鐵隨碼盤轉動,當磁鐵轉動到三只干簧管附近時,干簧管吸合并立即引起單片機引腳電平的變化,MSP430單片機能在6μs的時間內在低功耗狀態(tài)響應這一變化,記錄下變化過程后又立即回到低功耗狀態(tài)以最大限度地節(jié)省電能。研究中發(fā)現(xiàn),干簧管從吸合狀態(tài)回到斷開狀態(tài)有一個遲滯過程,正好可以防止液位在某一點輕微波動時使干簧管頻繁動作,從而避免單片機退出掉電狀態(tài)而消耗額外的電能。在電路板上三只干簧管以120°的間隔均勻地分布在同一圓周上,允許液位計以盡可能大的角速度旋轉。假定MSP430F133響應并處理一個外圍中斷的時間(與中斷程序復雜程度和時鐘速度有關)為200μs,則CPU能夠響應的最大角速度為120°/200μs。在筆者的一個制作實例中電路(含干簧管部分)經(jīng)過了120圈/秒的測試。外圍電路除干簧管在吸合狀態(tài)要吸收3.0V/20M=0.15μA電流外,其余電路均不消耗電流,這樣整機待機電流最小0.1μA,最大0.25μA,若電容充滿電可保證單片機在掉電后仍能正常工作一個月以上。
由于舍棄了機械減速裝置,液位計轉動時只需克服兩只固定軸承的阻力,因此,大大加強了機械靈活性和可靠性。當傳動輪周長為256mm時,液位計的分辨率為1mm,能滿足大部分測量要求。圖3中采用16位格雷碼輸出,量程可達65.535m,若用軟件將液位分辨率設置為1cm,則輸出量程可達655.35m,實際上只要引出線足夠多,量程并沒有限制,可根據(jù)要求做成任意量程的液位計。圖3的電路圖只是原理示意圖,實際應用中還要考慮抗干擾、野外使用的防雷處理等。
液位計的軟件設計也非常簡單,限于篇幅不多贅述,只需注意的是:在進入LPM4前將口線置成合適的電平,如格雷碼輸出置成低電平、485接口芯片U10置成低功耗狀態(tài)、液晶口線和電源置成低電平,以便使口線不消耗電流,從而使整機的低功耗得到保證。
4 結束語
在野外水位自動測量中,為了降低功耗,傳感器采用間歇上電方式,由于傳感器輸出應為絕對量編碼,因此在設計時采用很多齒輪變換和凸輪進位,這樣做帶來了設計的復雜性,并降低了傳感器的穩(wěn)定可靠性。
WZY-Ⅲ型浮子式磁光液位計為國內第一只分辨率為毫米的浮子式水位編碼器。水位信息自動采集系統(tǒng)中通常使用兩個字節(jié)表示水位信息,最大可表示65535mm。而對浮子式磁光液位計而言,其量程很大,可滿足所有液位測量要求。
利用本文所述原理和方法研制出的WZY-Ⅲ型浮子式磁光液位計具有相對量軸角編碼器的優(yōu)點,如精度高、穩(wěn)定性好、量程大、價格低廉、使用方便等,利用MSP430F133單片機的低功耗特點,使WZY-Ⅲ型浮子式磁光液位計能滿足絕對量編碼輸出的要求。
激光水位計和超聲波水位計的分辨率為毫米,但其誤差為相對誤差,量程稍大時,水位測量的絕對誤差甚至可能會超過規(guī)范所規(guī)定的誤差標準(±2cm)。浮子水位計原理簡單、誤差來源少,為水利部門常用水位測量儀器,但當前只有厘米級分辨率的浮子水位計,用于集水面積較大的水庫水位觀測時,使水庫流量計算過程產(chǎn)生鋸齒狀變化。
經(jīng)過兩年實踐證明,WZY-Ⅲ型浮子式磁光液位計不僅降低了浮子式液位計的成本,還大大提高了水位觀測精度和儀器可靠性。