
摘 要: 結(jié)合CAN總線的特點和列車這個特定的環(huán)境,對磁懸浮列車運行信號監(jiān)測系統(tǒng)的設計、實現(xiàn)以及多臺監(jiān)測儀之間的通訊進行了論述。
關(guān)鍵詞: 磁懸浮列車 運行監(jiān)測儀 CAN總線
一種面向未來的新型高速地表運輸系統(tǒng)—磁浮列車正以其獨特而神奇的魅力吸引著越來越多的關(guān)注目光。磁浮列車利用磁力抵消地球引力,使車體脫離軌道而懸浮在空中,并利用直線電機進行推進,因此它具有快捷、安全、舒適、低噪聲、無摩擦、無磨損、無污染的特點。磁懸浮列車外觀圖如圖1所示。

對于交通運輸系統(tǒng),安全可靠是第一要素,磁浮列車也不例外。為了使車輛安全運營,在磁浮列車上采用了列車運行信號監(jiān)測系統(tǒng),以實現(xiàn)對車輛的運行位置、速度、運行方向、加減速度的實時檢測,對司機的操作進行監(jiān)測,對運行的故障和操作的錯誤進行記錄,對運行的故障信息進行分級報警。本文正是以磁浮列車運行監(jiān)測系統(tǒng)為對象進行研究。
1 系統(tǒng)主要功能和要求
列車運行監(jiān)測系統(tǒng)主要功能和要求如下:
(1)通過對磁浮列車的實時速度、到站距離、運行方向、車門位置、駕駛臺操作的命令(如加減速、剎車、緊急制動等)進行自動監(jiān)測,并根據(jù)運行的位置提示列車的最高限速,同時記錄運行過程中的報警信息,從而實現(xiàn)磁浮列車的安全運行。
(2)通過安裝在首、尾車的兩套同樣系統(tǒng)對車輛運行狀況進行檢測,使系統(tǒng)在關(guān)鍵信息的采集上,具有一定的冗余性。
(3)對車輛運行過程中駕駛員發(fā)出的關(guān)鍵操作命令以及車輛故障信息進行記錄,即使掉電也不能夠丟失,便于提高駕駛員的崗位責任心。
考慮到測速傳感器—電感式接近開關(guān)安裝在車廂底板下,且離軌枕只有5cm,傳感器要加防撞措施,并且要適應室外的-25℃~+50℃的環(huán)境溫度。
2 系統(tǒng)總體設計
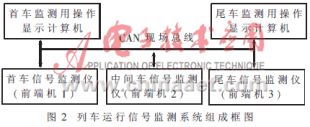
列車運行信號監(jiān)測系統(tǒng)主要由三臺運行監(jiān)測儀和兩臺操作顯示計算機組成,組成框圖如圖2所示。首、尾車的運行監(jiān)測儀主要完成上述(1)、(2)、(3)功能,中間車主要完成上述(1)、(2)功能,為便于工程化,三個運行監(jiān)測儀在硬件上是相同的,并且互為備份,兩臺操作顯示計算機都接收這三個運行監(jiān)測儀數(shù)據(jù),通過三選二的方法進行數(shù)據(jù)的顯示和記錄。對于這三個連續(xù)不斷的檢測通道,任何一個通道故障都是可容忍的,只有在系統(tǒng)兩個通道同時出現(xiàn)故障的情況下,才會在下一個停車點停車檢修。
該系統(tǒng)主要由列車運行監(jiān)測單片機和外接的速度傳感器組成。列車運行監(jiān)測儀以單片計算機為主CPU,以高亮數(shù)碼管為顯示單元,采用觸摸鍵進行輸入,速度傳感器及駕駛員操作經(jīng)過光隔后進入該監(jiān)測儀,監(jiān)測儀在首、尾及中間車各有一套速度傳感器,且相互獨立,監(jiān)測儀結(jié)構(gòu)框圖如圖3所示。從圖3可知,監(jiān)測儀有八路開關(guān)量輸入口、兩路模擬量輸入口和一個CAN通訊接口,此外監(jiān)測儀留有四路開關(guān)量輸出口,通過組合編碼向外輸出報警信號。

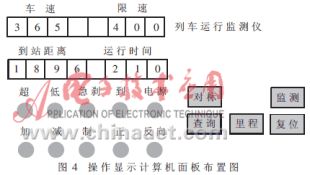
操作顯示計算機面板布置如圖4所示。在面板上各用3位數(shù)碼管顯示“車速”和“限速”,用4位數(shù)碼管顯示“到站距離”(單位為米),用3位數(shù)碼管顯示“本次運行時間”。通過發(fā)光二極管(8)以閃爍方式顯示報警內(nèi)容(如急剎、超速、速度過低、快到站了),或通過發(fā)光二極管(8)以亮和不亮方式顯示目前車輛運行狀況(如加速、減速、制動、正向或反向運行)。通過按鍵在第二行數(shù)碼管顯示本車運行的總里程,對標按鍵主要是給“到站距離”這個變量賦初值。
上述五臺單片機之間通過CAN總線互相連接。
3 CAN總線
控制器局域網(wǎng)(Controller Area Network,CAN)是一種有效支持分布式監(jiān)控或?qū)崟r控制的串行通信現(xiàn)場總線網(wǎng)絡, 且無主、從機之分;CAN可以用點對點、一點對多點及全局廣播幾種方式傳送和接收數(shù)據(jù);CAN直接通訊距離最遠可達10km(傳輸率為5kbps),通訊速率最高可達1Mbps(傳輸距離為40m);CAN總線上節(jié)點數(shù)可達110個。CAN的媒體訪問采用多主隨機發(fā)送協(xié)議,實現(xiàn)了無沖突的媒體訪問協(xié)議(載波偵聽多路訪問/沖突避免)。CAN具有實時性強、傳輸距離較遠、抗電磁干擾能力強、成本低等優(yōu)點,使其在道路運輸工具以外的領(lǐng)域,如機器人、工業(yè)自動化、醫(yī)療儀器、自動測試系統(tǒng)等領(lǐng)域得到了廣泛應用。用戶在開發(fā)帶CAN總線的微機系統(tǒng)時,可不必過多了解CAN的兩個協(xié)議,只要完成CAN通信控制器初始化即可進行數(shù)據(jù)通訊。
結(jié)合CAN總線的特點和列車這個特定的環(huán)境,在本列車運行信號監(jiān)測系統(tǒng)中,CAN總線是用作通信子網(wǎng)。主要是充分利用CAN總線在數(shù)據(jù)采集系統(tǒng)方面,尤其是在數(shù)據(jù)通信的可靠性、數(shù)據(jù)通信實時性以及數(shù)據(jù)通信的靈活性方面的優(yōu)勢,從而大量減少司機臺的控制信號線,使司機臺設計更簡單、合理。本文主要結(jié)合通訊可靠性介紹CAN通訊“死機”時的處理方法。
CAN總線協(xié)議通過兩層機制來保證總線數(shù)據(jù)的安全可靠傳輸。第一層是從總線角度考慮的。CAN協(xié)議根據(jù)每個節(jié)點的出錯情況,將節(jié)點分為三種類型并為每種類型定義了相應的總線行為。這些總線行為對總線的影響是不同的。出錯特別嚴重的節(jié)點會自動退出總線,不再參與總線活動。第二層是從單個節(jié)點角度考慮的。CAN控制器從硬件上提供了對自身出錯情況的監(jiān)視。錯誤捕捉寄存器提供了最近一次錯誤的種類和位置信息。發(fā)送錯誤寄存器和接收錯誤寄存器保存了發(fā)送或接收過程中發(fā)生的錯誤次數(shù)。錯誤報警極限寄存器設定發(fā)出報警信號時的錯誤次數(shù)。
CAN總線的“死機”問題,即部分CAN節(jié)點由于出錯嚴重自動退出總線而引起的采集數(shù)據(jù)丟失情況。解決這個問題,需要保證CAN節(jié)點不長久脫離總線。首先,CAN節(jié)點在收到錯誤報警信號時,一方面要進行錯誤診斷,另一方面要將出錯情況通過總線通知監(jiān)測總線的上位計算機;CAN節(jié)點在收到總線錯誤信號時,進行完錯誤處理后要清除復位狀態(tài)位。其次,監(jiān)測總線的上位計算機要實時記錄各個節(jié)點的狀況,能夠引入外部干預。對于單個節(jié)點來說,由于硬件損壞引起的脫離總線是無法自我修復的,必須增加冗余的通訊線路和CAN接口。
我們曾在CAN總線的防“死機”方面作過多次實驗。比如,用導線短接CAN總線。研究發(fā)現(xiàn),通過在程序中加入CAN控制器的狀態(tài)檢測處理指令,可顯著提高CAN系統(tǒng)的抗干擾性。指令如下:
while(SR_CAN&&0x80)MOD_CAN=MOD_CAN&&0Xfe;
注:SR_CAN 狀態(tài)寄存器;
MOD_CAN 工作模式寄存器。
4 磁浮車測速、定位與鑒向
常規(guī)列車是靠運動的車輪來測速的。由于磁懸浮列車是浮在軌道之上的,列車與軌道之間無接觸,所以測速不能用常規(guī)辦法進行。考慮磁懸浮列車線路上的枕是鋼材料,每隔1.2米安裝,為了測得列車的車速,可以通過檢測單位時間內(nèi)通過的枕木數(shù),檢測用的傳感器只要能檢測有無枕木,即采用接近開關(guān)就可測出。接近開關(guān)有光電的、超聲波的、電磁的,由于枕木是安裝在野外,所以檢測枕木所用傳感器必須具有響應速度快、工作溫度范圍寬、環(huán)境適應性好等特點,所以在綜合性能上電磁式接近開關(guān)較好。
接近開關(guān)輸出的信號是開關(guān)信號,比如高電平表示檢測到對象,低電平表示沒有檢測到對象,這樣難免會受到一些干擾。干擾主要表現(xiàn)為尖峰,這些尖峰會影響測速的精度,還會引起速度的跳變,所以在測速時要盡量排除這些干擾。首先對開關(guān)輸出信號進行預處理,包括高頻濾波、整形、隔離,經(jīng)過處理后的信號再進入單片機進行軟件濾波,可消除干擾的影響。
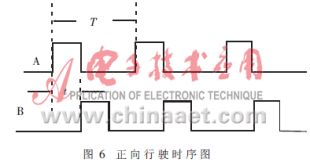
檢測單位時間內(nèi)通過的枕木數(shù)的測速方法在列車行駛速度較慢時會響應很慢,用測頻方法測速,就可以提高速度檢測的實時性和準確性。測量通過兩枕木之間的時間T,則V=1.2×1/T(米/秒)。為了測得列車的行駛方向,在列車上一前一后安裝兩個接近開關(guān),通過鑒相的方法可以判別列車的行駛方向,如圖5所示。列車正向行駛時,B滯后A 90度,即t/T=1/4,兩個傳感器的波形如圖6所示;列車反向行駛時,B滯后A 270度,即t/T=3/4。因此可由t/T的比值判別列車的行駛方向。
 ?
? 
5 電源電壓檢測及掉電數(shù)據(jù)保護
為了保存列車運行的歷史記錄(如列車運行的總里程數(shù)、發(fā)生故障的總數(shù)等),采用一片非易失性存儲器24C02。24C02數(shù)據(jù)接口采用二總線制結(jié)構(gòu),容量為512字節(jié),寫入的次數(shù)為10萬次。由于寫入的次數(shù)有限,就必須減少寫的次數(shù),為此采取了只在關(guān)機或掉電的時候才保存數(shù)據(jù)的思路。在關(guān)機的時候,由于電容效應,電源電壓不會立即降為零,保證單片機工作一段時間,所以,只要能檢測到電源電壓在下落,單片機立刻把數(shù)據(jù)寫入24C02中。電源電壓檢測電路由一個二極管和一只大電容組成,當?shù)綦姇r大電容上充的電可以保證單片機和24C02工作幾十毫秒,完成數(shù)據(jù)保存功能。
在我校磁懸浮列車試驗線上,對上述方案進行了車載實驗。實驗表明本文提出的利用接近開關(guān)進行車輛測速、定位和鑒向可以滿足磁懸浮列車的運行要求,運行信號監(jiān)測儀設計合理,CAN總線采用退出總線情況下的復位處理后,可保證通訊的可靠性。
參考文獻
1 鄔寬明.CAN總線原理和應用系統(tǒng)設計.北京:北京航空航天大學出版社,1996
2 陽憲惠.現(xiàn)場總線技術(shù)及其應用.北京:清華大學出版社,1999