
1 引言
隨著紡機(jī)裝備技術(shù)進(jìn)步,步進(jìn)與伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng)的應(yīng)用越來越廣泛,其功能多樣性和產(chǎn)品可靠性日臻完善,正在逐步取代原來的普通電機(jī)。而且隨著可編程控制器技術(shù)的日益成熟,將二者完整地結(jié)合起來,完成對(duì)各種復(fù)雜運(yùn)動(dòng)的自動(dòng)控制,實(shí)行機(jī)電一體化,正在成為一種趨勢(shì)。步進(jìn)電機(jī)是一種將脈沖信號(hào)轉(zhuǎn)換成直線位移或角位移的執(zhí)行元件。步進(jìn)電機(jī)的輸出位移量與輸入脈沖個(gè)數(shù)成正比,
其速度與單位時(shí)間內(nèi)輸入的脈沖數(shù)(即脈沖頻率) 成正比, 其轉(zhuǎn)向與脈沖分配到步進(jìn)電機(jī)的各相繞組的相序有關(guān)。所以只要控制指令脈沖的數(shù)量、頻率及電機(jī)繞組通電的相序, 便可控制步進(jìn)電機(jī)的輸出位移量、速度和方向。步進(jìn)電機(jī)具有較好的控制性能, 其啟動(dòng)、停車、反轉(zhuǎn)及其它任何運(yùn)行方式的改變都可在少數(shù)脈沖內(nèi)完成, 且可獲得較高的控制精度, 因而得到了廣泛的應(yīng)用。
2 步進(jìn)電機(jī)脈沖分配器
在可編程控制器plc的應(yīng)用中,步進(jìn)電機(jī)是常見的被控制對(duì)象。步進(jìn)電機(jī)是一種數(shù)字控制元件,直接接收脈沖信號(hào),它旋轉(zhuǎn)的角度和轉(zhuǎn)速分別與輸入的脈沖數(shù)和頻率成正比,因此只要控制輸入到其線圈繞組中的脈沖數(shù)和脈沖頻率就可控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)角度和轉(zhuǎn)速,但是輸入的脈沖還需要經(jīng)過脈沖分配器分配給步進(jìn)電機(jī)的各個(gè)繞組。用plc控制步進(jìn)電機(jī),脈沖分配器的設(shè)計(jì)是一個(gè)很重要和非常靈活的問題,它可以用硬件組成,也可以用軟件組成,本文以松下fp0-c16t plc為例,討論幾種實(shí)現(xiàn)步進(jìn)電機(jī)脈沖分配器的方法。
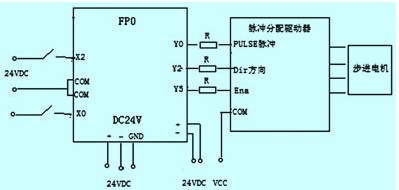
圖1 控制原理接線圖
用硬件實(shí)現(xiàn)步進(jìn)電機(jī)脈沖分配器控制原理接線圖如圖1所示。由于脈沖分配器是由硬件實(shí)現(xiàn),fp0-c16t只需提供一串脈沖,而fp0系列的plc具有脈沖輸出功能和高速計(jì)數(shù)器(hsc)功能,因此利用此功能進(jìn)行控制步進(jìn)電機(jī)非常方便。

圖2 控制梯形圖
fp0系列各型號(hào)的plc的輸出端y0或y1都具有脈沖輸出功能,其輸出脈沖的最大頻率為10khz。具體輸出脈沖頻率可以用軟件編程,y0或y1輸出的脈沖經(jīng)脈沖分配器把脈沖分配給步進(jìn)電機(jī)的各相繞組,同時(shí)y0或y1接至pulse的輸入接點(diǎn);當(dāng)達(dá)到頂定值時(shí)發(fā)生中斷,使y0或y1的脈沖頻率切換至下一參數(shù)。y2或y3是方向控制信號(hào)。vcc值為5v時(shí),r短路;vcc值為12v時(shí),r=1kq(≥1/8w);vcc值為24v時(shí),r=2kq(≥1/8w)。圖2是實(shí)現(xiàn)這一控制的梯形圖。dt100~dt106是存放輸出脈沖頻率和個(gè)數(shù)的通用寄存器,梯形圖中所給參數(shù)是輸出脈沖初始頻率為500hz,最高頻率為5000hz,脈沖個(gè)數(shù)為10000。
3 軟件步進(jìn)電機(jī)脈沖分配器設(shè)計(jì)
3.1 電原理設(shè)計(jì)
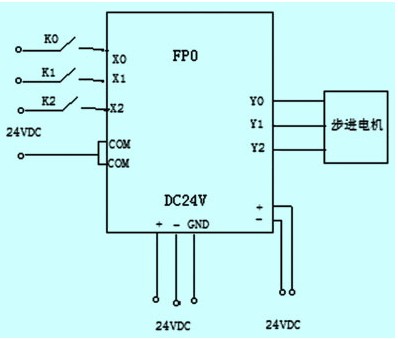
圖3 硬件接線圖
圖3是用軟件實(shí)現(xiàn)步進(jìn)電機(jī)脈沖分配器plc與步進(jìn)電機(jī)的硬件接線圖。步進(jìn)電機(jī)以最常見的三相六拍通電方式工作。k0、k1、k2分別是正轉(zhuǎn)、反轉(zhuǎn)及停止控制開關(guān),分別接在plc的輸入繼電器x0、xl和x2上;plc的輸出繼電器y0、y1和y2分別接步進(jìn)電機(jī)的三相繞組a、b、c。軟件實(shí)現(xiàn)脈沖分配的方法很多,這里討論三種實(shí)現(xiàn)方案。
3.2 軟件實(shí)現(xiàn)方案之一

圖4 軟件方案1梯形圖
梯形圖如圖4所示。步進(jìn)電機(jī)是以相六拍通電方式工作,即三相繞組的通電順序是:
正轉(zhuǎn):a-ab-b-bc-c-ca 反轉(zhuǎn):a-ac-c-cb-b-ba
該方案中,時(shí)鐘可以用plc中的定時(shí)器設(shè)計(jì)一個(gè)時(shí)鐘發(fā)生器,也可以使用plc中的內(nèi)部0.01s、0.02s、0.1s、0.2s、1s、2s時(shí)鐘,它們分別由plc中的特殊內(nèi)部繼電器r9018、r9019、r901a、r901b、r901c、r901d產(chǎn)生,為了方便、在此使用plc中的特殊內(nèi)部繼電器r901a 0.1s脈沖繼電器作為控制時(shí)鐘。繼電器r0和r1分別在正反轉(zhuǎn)接通;16位移位寄存器(繼電器)wr1產(chǎn)生正反轉(zhuǎn)的六個(gè)節(jié)拍,用移位寄存器的各觸點(diǎn)r10~r15與r0、r1進(jìn)行組合,使輸出繼電器y0、y1、y2按上述正反轉(zhuǎn)的順序通電。
3.3 軟件實(shí)現(xiàn)方案之二

圖5 軟件方案2梯形圖
梯形圖如圖5所示。該方案中,開關(guān)x0、x1作為正反轉(zhuǎn)啟動(dòng)控制,k2作為停止。時(shí)鐘仍然使用plc中的特殊內(nèi)部繼電器901a 0.1s脈沖繼電器作為控制時(shí)鐘。使用一個(gè)16位移位寄存器(繼電器)wr1,產(chǎn)生正反轉(zhuǎn)所需的六個(gè)節(jié)拍,用位移位寄存器(繼電器)的觸點(diǎn)r10-15和正反轉(zhuǎn)控制繼電器r0-r1的觸點(diǎn)進(jìn)行組合,并利用plc中的高級(jí)數(shù)據(jù)傳輸指令.把所需的控制字(見附表)直接輸出到plc的輸出端,使輸出繼電器y0、y1、y2按上述正反轉(zhuǎn)的順序通電。
3.4 軟件實(shí)現(xiàn)方之三

圖6 軟件方案3梯形圖
梯形圖如圖6所示。控制開關(guān)的作用和時(shí)鐘仍然如方案二所述。在該方案中,利用r9013運(yùn)行初期0n脈沖繼電器,開機(jī)時(shí)把輸出控制字送到plc的通用數(shù)據(jù)寄存器dt0~dt7中,根據(jù)正反轉(zhuǎn)控制要求把plc中的檢索寄存器ix(置初值(正轉(zhuǎn)置0或反轉(zhuǎn)置5)作為輸出控制字的初始指針;利用[f0 mv ,ixdt0,
wy0]指令,把所需的控制字直接輸出到plc的輸出端,之后修改ix的值,使輸出繼電器y0、y1、y2按上述正反轉(zhuǎn)的順序通電。r900b是比較相等標(biāo)志。
4 應(yīng)用案例

圖7 國(guó)產(chǎn)梳棉機(jī)電氣系統(tǒng)框圖

基于硬件實(shí)現(xiàn)方案設(shè)計(jì)了一套步進(jìn)電機(jī)控制系統(tǒng),成功用于國(guó)產(chǎn)梳棉機(jī)的電控系統(tǒng)的改造上。其電控系統(tǒng)原理框圖如圖7所示。該電氣控制系統(tǒng)通過plc控制步進(jìn)電機(jī)解決了國(guó)產(chǎn)梳棉機(jī)繼電器控制系統(tǒng)復(fù)雜,可靠性不高,控制精度不夠,故障點(diǎn)多,布線繁雜等難點(diǎn),可以按梳棉機(jī)的工藝要求方便地控制梳棉機(jī),還可以根據(jù)所紡纖維種類和對(duì)產(chǎn)品質(zhì)量要求確定梳棉機(jī)的電氣參數(shù),包括錫林和道夫的啟動(dòng)時(shí)間以及它們的轉(zhuǎn)速等。另外,該系統(tǒng)具有性能可靠,控制精度高、操作簡(jiǎn)單、運(yùn)行平穩(wěn)、無噪音等優(yōu)點(diǎn),提高了梳棉機(jī)的機(jī)電一體化程度,完全能滿足用戶的使用要求。
5 結(jié)束語
利用可編程控制器可方便地實(shí)現(xiàn)對(duì)電機(jī)的速度和位置進(jìn)行控制,能夠可靠地實(shí)現(xiàn)步進(jìn)電機(jī)的操作,完成各種復(fù)雜的動(dòng)作。基于plc控制步進(jìn)電機(jī)的控制系統(tǒng)方案在國(guó)產(chǎn)梳理機(jī)上的應(yīng)用,提高了梳棉機(jī)的機(jī)電一體化水平,更為重要的是為提高棉紡全流程運(yùn)行的穩(wěn)定性、可靠性奠定了基礎(chǔ),保證了全流程連續(xù)、同步、平穩(wěn)運(yùn)行,使輸出毛條長(zhǎng)片段、起長(zhǎng)片段、甚至短片段的均勻度都能穩(wěn)定在一定范圍內(nèi),從而保證了成紗質(zhì)量的穩(wěn)定性。基于plc控制步進(jìn)電機(jī)的控制系統(tǒng)在國(guó)產(chǎn)梳理機(jī)上的成功證明,該機(jī)所采用的控制系統(tǒng),完全可以應(yīng)用于其它國(guó)產(chǎn)傳統(tǒng)紡織設(shè)備的改造當(dāng)中,對(duì)國(guó)內(nèi)紡織廠進(jìn)行國(guó)產(chǎn)設(shè)備改造升級(jí)具有很好的參考價(jià)值。